

Elementi di algebra delle matrici - Dipartimento di Economia e ...
Elementi di algebra delle matrici - Dipartimento di Economia e ...
Elementi di algebra delle matrici - Dipartimento di Economia e ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
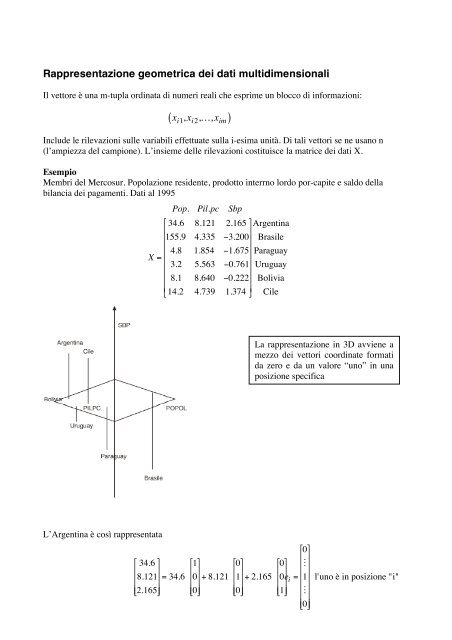
Spazio <strong>delle</strong> variabili e <strong>delle</strong> unità.Le analisi statistiche della matrice dei dati sono talvolta <strong>di</strong>rette alle relazioni tra le variabili ed inquesto caso la si considera un aggregato <strong>di</strong> m colonneOgni x i è il vettore colonna formato dalle osservazioni per la i-esima variabile su tutte le n unitàincluse nella rilevazione. Si <strong>di</strong>ce che in questa analisi ci si muove nello spazio <strong>delle</strong> variabili che èun sottoinsieme <strong>di</strong> R m .In alternativa l’angolatura <strong>di</strong> stu<strong>di</strong>o potrebbe puntare <strong>di</strong> più sulle relazioni tra le unità ed inquesto caso lamatrice dei dati è considerata un aggregato <strong>di</strong> n righeOgni u i è è il vettore riga formato dalle rilevazioni effettuate su tutte le m variabili rispetto alla i-maunità. Si <strong>di</strong>ce che in queste analisi ci si muove nello spazio <strong>delle</strong> unità, sottinsieme <strong>di</strong> R n .EsempioLa <strong>di</strong>sposizione dei punti dallo spazio (dalle variabili o <strong>delle</strong> unità) è la struttura che deve esserespiegata e semplificaa. L’analisi multivariata può fare riferimento sia ad al numero <strong>di</strong> unità n che alnumero <strong>di</strong> variabili m ed a seconda della scelta si richiamano certe tecniche e non altre. Un punto incomune è che, sia nel caso <strong>delle</strong> unità che nel caso <strong>delle</strong> variabili, le <strong>di</strong>mensioni effettivamente ingioco non sono n o m, ma dei valori inferiori.La male<strong>di</strong>zione della <strong>di</strong>mensionalitàLa qualità <strong>di</strong> una tecnica <strong>di</strong> analisi multivariata è in genere misurata sul rapporto: <strong>di</strong>mensioninecessarie/<strong>di</strong>mensioni totali e sul rapporto variabilità nello spazio effettivo/variabilità nello spaziototale. Il problema della iper<strong>di</strong>mesionalità (o della male<strong>di</strong>zione della <strong>di</strong>mnensionalità) è che manmano che aumentano le <strong>di</strong>mensioni i punti <strong>di</strong>ventano sempre più sparsi ed è più <strong>di</strong>fficile in<strong>di</strong>viduarerelazioni significative.
Consideriamo l’ipercubo [-a,a] m che abbia inscritta una ipersfera <strong>di</strong> raggio r=a. La quotaparte <strong>di</strong> ipervolume contenuta nella sfera èq m=ipervolume sferaipervolume cubo =m2πm2 m−1 Γ( m 2)€doveΓ( −)È la funzione gamma che è simile al fattorialecioè se m/2 è intero vale:€Γ( m /2) = (m −1)!Se m è piccolo il centro dell’ipercubo è importantecome le altre zone. All’aumentare <strong>di</strong> m siha però €lim q = 0 mm →∞Cioè il volume dell’ipercubo tende sempre più aconcentrarsi sugli angoli con conseguenze moltoserie per € le nostre analisi: se i nostri punti sonoanalizzati con una griglia regolare, la maggiorparte <strong>delle</strong> ipercelle risulterà vuota.Dimesioni dello spazio m 1 2 3 4 5 6 7quota parte <strong>di</strong> ipervolume q m1 0.785 0.524 0.308 0.164 0.081 0.037€
€Norme <strong>di</strong> vettoriLa norma <strong>di</strong> un vettore è una funzione definita in R m ed a valori in RTale chef xf : Rm →( ) = 0 ⇒ x = 0( ) ≥ 0 ∀ x ∈ R m( ) ≤ f ( x) + f ( y) ∀ x,y ∈ R m( ) = α f ( x) α ∈ R, x ∈ R m( ) − f ( y) ≤ f ( x − y) ∀ x,y ∈ R mf xf x + yf αxf xUn’importante classe <strong>di</strong> norme è quella <strong>di</strong> Minkowsky:R€⎡ mx p= ⎢ ∑⎣px ii=1⎤⎥⎦1pp ≥1Tale classe include <strong>di</strong>versi casi speciali€City block : x 1= ∑ x iEuclidea x 2= x i2∑( ) 1 2= x t x{ }Tchebycheff : x ∞= max1 ≤ i ≤ m x iSe nella norma non è in<strong>di</strong>cato l’in<strong>di</strong>ce si intende quella euclidea. Tutte le norme sono equivalentidato che rispondono ad un preciso or<strong>di</strong>namento numerico:€x p≤ x p+1e quin<strong>di</strong> sex€ p≤ y p≤ z p⇒ x q≤ y q≤ z qin<strong>di</strong>pendentemente dal valore assegnato ad p e da q (purché p,q≥1 altrimenti non si tratta <strong>di</strong> norme)a) Le norme <strong>di</strong> Minkowsky verificano la <strong>di</strong>suguaglianza <strong>di</strong> Holder€x t 1y ≤ x py qperp + 1 q =1che ha come caso speciale la <strong>di</strong>seguaglianza Cauchy-Schwartz per p=2€x t y ≤ x 2y 2
) Ogni vettore non nullo può essere trasformato (riscalato) in modo da avere norma unitaria.y = 1 x x ⇒ y = 1 x x = 1 x x =1Esempio⎡ 6 ⎤⎢ ⎥x =⎢ €3⎥⎣ ⎢ −2⎦⎥⎡ 6 7 ⎤x = x t ⎢ ⎥x = 36 + 9 + 4 = 7 ⇒ y =⎢3 7⎥⎣ ⎢ −4 7⎦⎥c) Rappresentazione geometrica del vettore.I vettori € possono essere trattati come entità geometriche. Come mostra la figura, un vettore puòessere rapprresentato come una freccia che si <strong>di</strong>parte dall’origine per raggiungere un punto concoor<strong>di</strong>nate fornite dagli elementi del vettore.⎡OP è il vettore P ≡ x ⎤1P⎢ ⎥⎣ ⎦x 2Pcon norma P = x 2 21P+ x 2P(in base al teorema <strong>di</strong> Pitagora)⎡ 1⎤⎡ 0⎤P = x 1P ⎢ ⎥ + x⎣ 02P ⎢ ⎥ = x⎦ ⎣ 11Pe 1+ x 2Pe 2⎦€d) La legge dei coseni (teorema <strong>di</strong> Carnot)I vettori posso <strong>di</strong>fferire per lunghezza, per l’angolo formato con gli assi o per entrambi.Rispetto all’angolo θ tra i vettori P1 e P2 possiamo stabilire un utile teorema.d = asenθX = acosθOX è la proiezione <strong>di</strong> P 1su P 2€d può essere visto come la<strong>di</strong>stanza perpen<strong>di</strong>colare tra P1 eP2Ne consegue che:c 2 = d 2 + ( b − X) 2 = d 2 + b 2 − 2bX + X 2= a 2 senθ + b 2 − 2abcosθ + a 2 cos 2 θ[ ] + b 2 − 2abcosθ= a 2 sen 2 θ + cos 2 θ
Dal teorema <strong>di</strong> Carnot sappiamo che2 2 2P 1 P 2 = OP1 + OP2 − 2OP1 ⋅ OP 2 cosθI segmenti possono essere espressi come <strong>di</strong>stanze euclidee (al quadrato)( ) 2 + x 2 2( 12 − x 22 ) 2 = x 2 2( 11 + x 21 ) + x 2 2( 12 + x 22 ) − 2 x 11 x 21 + x 12 x 22P € 21 P 2 = 2 2 x11 − x 21( )€PoichéSi ha:€E quin<strong>di</strong>:€2( ) ; OP 2 = 2 2( x12 + x 22 )2OP 1 = 2 2 x11 + x 21( ) = −2OP 1 ⋅ OP 2 cosθ−2 x 11 − x 21 + x 12 − x 22⎡( x 11 − x 21 + x 12 − x 22 ) = x 2 211 + x⎣ ⎢21cosθ =x 11 x 21 + x 12 x 222 2( + x 22 ) = P t 1 P 2P 1 ⋅ P 2x 2 11 + x 2( ) 21 ⋅ x 12( ) ⋅ x 2 2( 11 + x 21 )= P 1 tP 1⋅⎤⎦ ⎥ ⋅ cosθP 2P 2Ne consegue che il prodotto scalare è pari al prodotto <strong>delle</strong> lunghezze dei due vettori per il cosenodell’angolo da essi formato.€P t 1 P 2 = P 1 ⋅ P 2 cosθDati due vettori noti, ovunque essi siano, possiamo determinare l’angolo tra essi compreso.Se i vettori sono normalizzati€P 1 + = P 1P 1, P 2 + = P 2P 2il prodotto scalare è pari al coseno:€P 1+ t P 2 + = cosθ ⇒ −1≤ P 1+ t P 2 + ≤1€
€f) Trasformazioni ortogonali (rotazione degli assi)È’ spesso necessaria o opportuna la trasformazione del piano cartesiano: rotazioni, contrazioni,<strong>di</strong>latazioni, deformazioni, etc. allo scopo <strong>di</strong> semplificare il problema trattato. Ogni trasformazionedel piano può essere descritta algebricamente con <strong>delle</strong> equazioni che collegano il piano cartesianooriginale con il nuovo sistema <strong>di</strong> coor<strong>di</strong>nate.Consideriamo un sistema <strong>di</strong> assi ortogonali x 1 e x 2 ed un punto P=(x 1 ,x 2 ). Guar<strong>di</strong>amo questopunto anche con un altro sistema <strong>di</strong> assi ortogonali y 1 e y 2 che è ruotato <strong>di</strong> un angolo θ rispetto alpiano (x 1 ,x 2 ) con riferimento all’origine. Questa è una rotazione ortogonale cioè il movimento delpiano è rigido e solidale e ogni nuovo asse forma con il corrispondente vecchio asse lo stessoangolo (rotazione in senso antiorario. Moto rigido con perno sull’origine).Il vettore P può essere scritto in entrambi i sistemi come:( ) sistema ( y 1y 2 )sistema x 1x 2P = x 11e 1+ x 12e 2P = y 11e * *1+ y 21e 2€dove e 1,e 2,e * 1,e * 2sono dei vettori normalizzati ed ortogonali (ovvero vettori coor<strong>di</strong>nate) tali che€e T *i e j = d ij e t i e * ⎧j = d ij d ij = delta <strong>di</strong> Kronecker ⇒ d ij = ⎨1 se i = j⎩ 0 se i ≠ jNel sistema (x 1 , x 2 ) effettuiamo il prodotto scalare:€*e t *1 ( x 11⋅ e 1+ x 12⋅ e 2 ) = e t *1P = x 11e t *1e 2+ x 12e t 1e 2Lo ripetiamo nel sistema (y 1 , y 2 ) per ottenere:€*e t 1y 11⋅ e * * *( 1+ y 21⋅ e 2 ) = e t *1P = y 11e t 1e * *1+ y 21e t 1e * 2= y 11⋅1+ y 21⋅ 0 = y 11e quin<strong>di</strong>, eguagliando i due risultati, si avrà€x 11e 1* t e 1+ x 12e 1* t e 2= y 11Allo stesso modo, effettuando il prodotto scalare per il secondo vettore per P, si ottiene€e 2* t P = x 11 e 2* t e 1 + x 12 e 2* t e 2 ;
Si arriva pertanto al sistema:y 11 = x 11 e 1* t e 1 + x 12 e 1* t e 2y 21 = x 11 e 2* t e 1 + x 12 e 2* t e 2Cerchiamo <strong>di</strong> scoprire la natura geometrica del particolare prodotto scalare€e i* t e j =e i * t e je i * ⋅ e jdato che e i * = e j =1€e i* t e j. Innanzitutto:Il rapporto tra il prodotto scalare ed il prodotto <strong>delle</strong> norme dei vettori, come si è visto, è pari alcoseno dell’angolo tra i due vettori€e i* t e je i * ⋅ e j= cosθ⎛θ = arcos⎜⎝e i *e i* t e j⋅ e j⎞⎟⎠Ad ogni prodotto scalare del sistema <strong>di</strong> trasformazione può essere applicata la relazione del coseno(tenuto conto del giusto angolo)*e t *1 e 1 = cosθ ; e t 2 e 1 = cos( θ + 90) = −sen( θ)*e t *1 e 2 = cos( 90 −θ) = senθ ; e t 2 e 2 = cosθIl sistema <strong>di</strong> trasformazione può quin<strong>di</strong> essere riespresso come€€y 11= x 11cosθ − x 12senθy 21= x 11senθ + x 12cosθ⎡⎢⎣y 11y 21⎤ ⎡ cosθ +senθ⎤⎡⎥ = ⎢⎥ x ⎤ ⎡11cosθ ⎤ ⎡ senθ⎤⎢ ⎥ = x 11 ⎢ ⎥ + x 12 ⎢ ⎥⎦ ⎣ −senθ cosθ ⎦ ⎣ ⎦ ⎣ −senθ⎦⎣ cosθ⎦x 12In notazione <strong>matrici</strong>ale compatta si ha: Y=XQ t dove Q è una matrice ortogonale detta <strong>di</strong> rotazione.Tale € matrice è anche ortonormale cioè ortogonale e con norma unitaria <strong>di</strong> righe e <strong>di</strong> colonne.
⎡ cosθ −senθ⎤⎡Q t Q = QQ t = ⎢⎥ cosθ senθ ⎤⎢⎥⎣ +senθ cosθ ⎦ ⎣ −senθ cosθ⎦⎡= cos2 θ + sen 2 θ 0 ⎤⎢⎥⎣ 0 cos 2 θ + sen 2 θ⎦⎡= 1 0 ⎤⎢ ⎥ ;⎣ 0 1⎦EsempioSupponiamo che θ=30° e determiniamo la corrispondente matrice <strong>di</strong> rotazione.€cos( θ) = 3 2 ; sen( θ) =1 2 ⇒⎡3 2 + 1 ⎤⎢Q = 2⎥⎢− 1 ⎥⎢ 3 2⎥⎣ 2 ⎦€Il punto P rimane fermo. È il sistema degli assi che ruota. Se P=(1,1) nel sistema (x 1 ,x 2 ) nel nuovosistema (y 1 ,y 2 ) <strong>di</strong>venterà⎡3 2 + 1 ⎤ ⎡ 3 +1 ⎤⎢2⎥ ⎡ 1⎤⎢( )⎥⎢⎢ − 1 ⎥ ⎢ ⎥ = ⎢ 2 ⎥3 2⎥⎣ 1⎦⎢ ( 3 −1)⎥⎣ 2 ⎦ ⎣ 2 ⎦Laddove nel vecchio sistema <strong>di</strong> assi le coor<strong>di</strong>nate del punto avevano lo stesso valore, nel nuovosistema i rapporti cambiano e una <strong>delle</strong> coor<strong>di</strong>nate <strong>di</strong>venta maggiore dell’altra. Questo, comepotremo accertare non è € senza significato.g)Riduzione <strong>delle</strong> <strong>di</strong>mensioniConsideriamo i punti:⎡ 1⎤⎢⎣ 1⎦⎥ ; ⎡ 2 ⎤⎢⎣ 2 ⎦⎥ ; ⎡ 6 ⎤⎢⎣ 6 ⎥⎦I punti sono perfettamente allineati lungo laretta x 2 =x 1 . Nota una coor<strong>di</strong>nata l’altra sidetermina € in modo automatico. Si vuole oraspostare l’asse x 1 in modo da farlo coinciderecon la retta <strong>di</strong> equazione x 2 =x 1 .
La matrice <strong>di</strong> rotazione necessaria per tale operazioneè⎡ ⎛θ = π cos π ⎞⎜4 ⇒ ⎝ 4 ⎠⎟ −sen ⎛ π ⎞ ⎤ ⎡ 2⎢⎜⎝ 4 ⎟ ⎥ + 2 ⎤⎠⎢ ⎥⎢⎢ ⎛sen⎜π ⎞⎝ 4 ⎠⎟ cos ⎛⎜π ⎥ = ⎢ 2 2⎞⎝ 4 ⎟ ⎥⎣ ⎢⎠ ⎦ ⎥− 2 ⎥⎢ 2 ⎥⎣ ⎢ 2 2 ⎦ ⎥La rotazione avviene in senso orarioper cui si inverte il segno degli elementifuori <strong>di</strong>agonale.€I punti trasformati sono perciò1⎡2 − 2⎤⎢2⎣2 2 ⎦⎥ ⎡ 1 ⎤⎢⎣ 1 ⎦⎥ = ⎡ 0 ⎤⎢⎣ 2 ⎥⎦1⎡2 2⎤⎢2⎣2 2⎦⎥ ⎡ 2 ⎤⎢⎣ 2 ⎦⎥ = ⎡ 0 ⎤⎢⎣ 2 ⎥⎦1⎡2 − 2⎤⎢2⎣2 2 ⎦⎥ ⎡ 6 ⎤ ⎡ 0 ⎤⎢⎣ 6 ⎥ = ⎢ ⎥⎦ ⎣ 6 2⎦L’aggregato€dei punti nelle coor<strong>di</strong>nateoriginali era:⎡ 1 2 6⎤⎢ ⎥⎣ 1 2 6⎦Nelle nuove coor<strong>di</strong>nate <strong>di</strong>venta invece:⎡ 0 0 0 ⎤⎢⎥ = 1 ⎡ 0 0 0⎤⎢ ⎥⎣ 2 2 2 6 2⎦2 ⎣ 1 2 6⎦e quin<strong>di</strong>, <strong>di</strong> fatto, è stata eliminata una <strong>di</strong>mensione che era solo un duplicato dell’altra: basta un soloasse per rappresentare € i tre punti dati. È chiaro € che nella realtà in punti non sono mai perfettamenteallineati, pure una opportuna rotazione degli assi consente <strong>di</strong> trascurare <strong>di</strong>mensioni pocoinformative.h)Rotazione degli assi e <strong>di</strong>stanze.Le rotazioni ortogonali mantengono inalterata la <strong>di</strong>stanza euclidea tra i punti. Consideriamo latrasformazione Y=RX dove⎡R = ⎢cos θ⎣ −sen θ( ) +sen( θ)( ) cos( θ)⎤⎥⎦€In<strong>di</strong>chiamo i nuovi punti nel sistemaruotato conQ 1 = RP 1 e Q 2 = RP 2€
La <strong>di</strong>stanza euclidea è data daQ 1− Q 22= ( Q 1− Q 2 ) t ( Q 1− Q 2 ) = Q t 1Q 1− Q t 1Q 2− Q t 2Q 1+ Q t 2Q 2t= P 1R t t( R)P 1− P 1R t t( R)P 2− P 2R t t( R)P 1+ Q 2 ( R t R)Q 2= P t 1P 1− P t 1P 2− P t 2P 1+ P t 2P 2= ( P 1− P 2 ) t ( P 1− P 2 )= P 1− P 22Quin<strong>di</strong> la <strong>di</strong>stanza tra i punti P 1 e P 2 è la stessa nei due sistemi <strong>di</strong> assi purché la rotazione siaortogonale.€ Le proprietà <strong>delle</strong> rotazioni ortogonali si applicano oltre che al piano anche allo spazio m<strong>di</strong>mensionale: anche se qui sono meno imme<strong>di</strong>ate le relazioni tra gli elementi della matrice <strong>di</strong>rotazione e le funzioni trigonometriche degli angoli che i vettori formano con gli assi. In generale,ogni trasformazione ortogonale corrisponde ad una rotazione degli assi (intorno all’origine) <strong>di</strong> undato angolo. Le <strong>di</strong>stanze tra i punti restano comunque invariate.L’uguaglianza <strong>delle</strong> norme – sotto rotazione ortogonale – non implica che gli elementi deivettori abbiano lo stesso peso all’interno dei vettori in relazione agli altri elementi.EsempioConsideriamo il punto P=(2,√3) ed effettuiamo unarotazione degli assi <strong>di</strong> 30° (π/6)⎡ 3− 1 ⎤ ⎡ 3⎤⎢ ⎥⎢ 2 2⎡ 2 ⎤ ⎢ ⎥⎥ ⎢ ⎥ = ⎢ 2 ⎥⎢ 1 3⎥⎣ 3⎦⎢5⎥⎣ ⎢ 2 2 ⎦ ⎥ ⎣ 2 ⎦Dal sistema y 1 y 2 si ruota a x 1 x 2€Il ruolo <strong>delle</strong> <strong>di</strong>mensioni è <strong>di</strong>verso nei due sistemi.Nei due sistemi, la norma al quadrato nonché i pesi degli elementi (nell’ambito del vettorenormalizzato) sono⎛⎜⎝Sistema x 1, x 2322( ) Sistema ( y 1, y 2 )2⎞ ⎛⎟ + ⎜ 5⎞⎟⎠ ⎝ 2⎠( 2) 2 + ( 3) 2=177328 + 2528 =1 1628 + 1228 =1Nel secondo sistema il peso <strong>delle</strong> <strong>di</strong>mensioni si inverte e l’asse più rilevante o preferenziale è y 1 enon più x 2 . È’ chiaro che a seconda della posizione del punto e dell’angolo <strong>di</strong> rotazione del sistemasi può fare in modo da € precostituire l’or<strong>di</strong>namento dei pesi desiderato.=1i) Scelta del perno (pivot) <strong>di</strong> rotazione
e C è la cosiddetta matrice <strong>di</strong> centramento. Ecco un esempio⎡1− 3⎢⎢4⎢ 2⎢⎣ 11021− 3⎤10⎥⎥5 ⎥⎥0 ⎦;ˆ µt=( 2, 1, 3)⇒⎡−1⎢⎢2xˆ=⎢ 0⎢⎣−10−110− 6⎤7⎥⎥2 ⎥⎥− 3⎦⎧⎡1⎪⎢⎨⎢0⎪⎢0⎪⎢⎩⎣0010000100⎤0⎥⎥ −0⎥⎥1⎦14⎡1⎢⎢1⎢1⎢⎣11111⎡1⎢⎢4⎢2⎢⎣1111110211⎤⎫⎡11⎪1⎥ ⎢⎥⎢4 0⎬1⎥⎪⎢22⎥⎪⎢1⎦⎭⎣11− 3⎤⎡210⎥ ⎢⎥ − ⎢25 ⎥ ⎢2⎥ ⎢0 ⎦ ⎣21111− 3⎤⎡110⎥ ⎢⎥ = ⎢45 ⎥ ⎢2⎥ ⎢0 ⎦ ⎣13⎤⎡−13⎥ ⎢⎥ = ⎢23⎥⎢ 0⎥ ⎢3⎦⎣−110210− 3⎤10⎥⎥ −5 ⎥⎥0 ⎦−11014− 6⎤7⎥⎥2 ⎥⎥− 3⎦⎡8⎢⎢8⎢8⎢⎣8444412⎤12⎥⎥12⎥⎥12⎦La matrice <strong>di</strong> centramento C è idempotente e simmetricaC= CteC ⋅C= C2= Ctt t( ν ν )t ⎡ 1 t ⎤ ⎡ t 1 ⎤ 1 tC =⎢I n − ν nνn IICn ⎥=⎢ n − n nn ⎥= n − ν nνn =⎣ ⎦ ⎣⎦ nt⎡ 1 t ⎤ ⎡ 1 t ⎤ 1 tC ⋅ C = C ⋅C=⎢I n − ν nνn ⋅ I n n n = I n − n nn ⎥ ⎢− ν ν⎣ ⎦ ⎣ n ⎥ ν ν⎦ n1 t 1 t 1 t 1 t= I n − ν nνn − ν nνn + nνnνn = I n − ν nνn = C2n n nn1 t− ν nνnn+n12νnνtnνnνtnLa matrice <strong>di</strong> devianze-codevianze èfacilmente ottenuta dal prodotto <strong>matrici</strong>aleX ˆ t X ˆ = X t C t CX = X t CX = VLa matrice <strong>di</strong> varianze-covarianzeW = 1 n V = 1 n X ⎡t CX =⎣⎢€Si ottiene dal prodotto <strong>di</strong> <strong>matrici</strong> trasformate1 nX tC t⎤ ⎡⎦⎥⎣⎢1nC⎤X⎦⎥€Y = 1 n CX⇒ Y t Y = W€
Esempio⎡ 3 4 −1 4 −1 4 −1 4⎤Y = 1 ⎢⎥⎢−1 4 3 4 −1 4 −1 4⎥2⎢−1 4 −1 4 3 4 −1 4⎥⎢⎥⎣ −1 4 −1 4 −1 4 3 4 ⎦⎡ −1 2 1 0 −1 2⎤Y t ⎢⎥Y =⎢0 −1 2 1 2 0⎥⎣ ⎢ −3 7 2 1 −3 2⎦⎥⎡ 6 4 −2 4 23 4⎤⎢⎥=⎢−2 4 2 4 −5 4⎥= W⎣ ⎢ 23 4 −5 4 67 4⎦⎥⎡ 1 1 −3⎤⎡ −1 0 −6⎤⎢ ⎥⎢4 0 10⎥ = 1 ⎢ ⎥⎢2 −1 7⎥⎢ 2 2 5 ⎥ 2⎢0 1 2 ⎥⎢ ⎥ ⎢ ⎥⎣ 1 1 0 ⎦ ⎣ −1 0 −3⎦Questi risultati giustificano l’adozione della trasformazione lineare€ˆ X = CXIl cui effetto è <strong>di</strong> spostare l’origine degli assi sul centroide della matrice dei dati .€tµ = ( µ , µ ,…,µ ).ˆ1 2 mLa <strong>di</strong>spersione dei punti rimane tuttavia invariata.E’ importante non perdere <strong>di</strong> vista il risultato ottenuto: il contenuto informativo dellamatrice dei dati può essere fatto confluire nella matrice <strong>di</strong> varianze-covarianze. Almeno quelloessenziale, visto che comunque una informazione si perde: la <strong>di</strong>fferenza tra le me<strong>di</strong>e <strong>delle</strong> variabilioriginarie.














