- Page 1 and 2: Eugenijus pileckas AVIACINIAI SKRYD
- Page 3 and 4: UDK 629.7 (075.8) Pi62 Eugenijus Pi
- Page 5 and 6: PRATARMĖ Knygoje nagrinėjami avia
- Page 7 and 8: 3 pav. Orlaivio kampinio judėjimo
- Page 9 and 10: 1 lentelė. Pagrindinių parametrų
- Page 11 and 12: Pagal kontroliuojamos informacijos
- Page 13 and 14: Aukščiuose nuo 11 000 m iki 20 00
- Page 15 and 16: Taikant dujų būsenos lygtis P ρ
- Page 17 and 18: 1.1.3 pav. Apibendrinta matavimo pr
- Page 19 and 20: 1.1.7 pav. Membraninė dėžutė Su
- Page 21 and 22: 1.1.10 pav. Vamzdinių spyruoklių
- Page 23 and 24: Perdavimas kumšteliais atliekamas
- Page 25 and 26: Deformacinių manometrų metodinės
- Page 27 and 28: Pirmosios eilės kompensatoriuje bi
- Page 29 and 30: a) b) c) 1.1.25 pav. Tiesinė ir ne
- Page 31 and 32: 1.1.29 pav. Judančiosios juostos i
- Page 33 and 34: 1.1.32 pav. Spalvų panaudojimas at
- Page 35 and 36: 1.1.35 pav. Skrydžio prietaisų gr
- Page 37 and 38: 1.1.37 pav. parodytas pavyzdys, kai
- Page 39 and 40: Vandens kondensato Pito-statinėje
- Page 41 and 42: Kiaurymės S1, S2, S3, perduodanči
- Page 43 and 44: 1.1.47 pav. Orinio slėgio imtuvo
- Page 45 and 46: alansavimo elementas 11 su trauke 1
- Page 47 and 48: 1.1.52 pav. Aukščiamačių temper
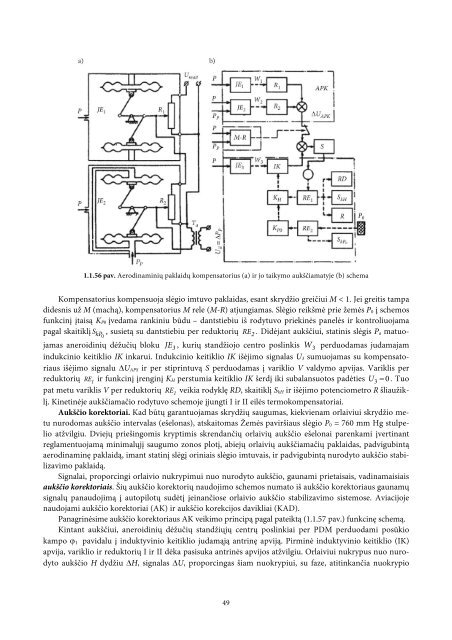
- Page 49: 1.1.54 pav. Potenciometrinis aukš
- Page 53 and 54: 1.1.60 pav. Greičio indikatoriaus
- Page 55 and 56: sukimasis sinchroniškas su indekso
- Page 57 and 58: Kai M >1, dalis dinaminio slėgio e
- Page 59 and 60: 1.1.68 pav. Principinė greičio V
- Page 61 and 62: Skaičiaus M indikatoriaus su signa
- Page 63 and 64: Kai skrydis horizontalusis, šis sk
- Page 65 and 66: 1.1.76 pav. Variometro su kulisiniu
- Page 67 and 68: Paklaida dėl slėgio kitimo vėlav
- Page 69 and 70: Tikrojo orinio greičio modulio pas
- Page 71 and 72: Pradžioje tarsime, kad giroskopas
- Page 73 and 74: Labai aukštas šių virpesių (jie
- Page 75 and 76: 1.2.7 pav. Dviejų laipsnių girosk
- Page 77 and 78: 1.2.10 pav. Orlaivio padėties nust
- Page 79 and 80: 1.2.12 pav. Vakuumu valdomos pavaro
- Page 81 and 82: 1.2.15 pav. Giroskopo išorinio rė
- Page 83 and 84: Lankstusis laidas 3 - tai metalini
- Page 85 and 86: 1.2.23 pav. Trijų laipsnių girosk
- Page 87 and 88: Besisukdami dubens radialinėje kra
- Page 89 and 90: Hidrauliniame slopintuve naudojamas
- Page 91 and 92: į kumštelio 5 griovelį. Tuo pat
- Page 93 and 94: 1.2.34 pav. Padėties giroskopo rod
- Page 95 and 96: 1.2.37 pav. Apibendrinta aviahorizo
- Page 97 and 98: 1.2.40 pav. Aviahorizontas su vakuu
- Page 99 and 100: Abi apvijos maitinamos iš reguliuo
- Page 101 and 102:
Kaip rezultatas atsiranda signalas
- Page 103 and 104:
1.2.48 pav. Dviejų laipsnių giros
- Page 105 and 106:
Prietaiso jautrumo riba yra minimal
- Page 107 and 108:
tės nebuvimas. Posūkio greičio r
- Page 109 and 110:
1.2.54 pav. Orlaivio posvyrio ir sl
- Page 111 and 112:
srovė ir svertas linksta žemyn, k
- Page 113 and 114:
taktai K išsijungia. Apvijoje W1 n
- Page 115 and 116:
1.2.65 pav. Oro srauto poveikio rot
- Page 117 and 118:
1.3. Inerciniai įrenginiai 1.3.1.
- Page 119 and 120:
Ašinio akcelerometro jautrusis ele
- Page 121 and 122:
Esamu atveju G p = G s = G. Tada:
- Page 123 and 124:
1.4.1 pav. Pagrindinės magnetinio
- Page 125 and 126:
Magneto svyravimai dėl veikiančio
- Page 127 and 128:
1.4.6 pav. Žemės magnetizmas: lin
- Page 129 and 130:
Jėgos linijos ir Žemės paviršia
- Page 131 and 132:
Skystinis slopinimas. Kompaso dubuo
- Page 133 and 134:
kompasų versijose vertikaliosios m
- Page 135 and 136:
komponentė Z veikia magnetinės si
- Page 137 and 138:
1.4.17 pav. Pagrindinė magnetoindu
- Page 139 and 140:
1.4.20 pav. Sumarinis srautas, kada
- Page 141 and 142:
dedamosios dydis priklauso nuo kamp
- Page 143 and 144:
netinį lauką, nukreiptą skersai
- Page 145 and 146:
latas) taip pat yra prie išorinio
- Page 147 and 148:
Norint panaikinti giroskopo kardani
- Page 149 and 150:
Kaip aprašyta 1.4.2 poskyryje, mag
- Page 151 and 152:
1.4.36 pav. Orlaivio magnetinio lau
- Page 153 and 154:
1.4.40 pav. Kompaso deviacijų, suk
- Page 155 and 156:
Rytinė deviacija −Vakarinė devi
- Page 157 and 158:
Kompaso svyravimo procedūra. Yra d
- Page 159 and 160:
Magnetų pora pajuda iš savo neutr
- Page 161 and 162:
nis pasiekia didžiausią reikšmę
- Page 163 and 164:
Priklausomai nuo siųstuvo T X ir i
- Page 165 and 166:
Dažnai sistemoje naudojamas treči
- Page 167 and 168:
orlaivio tikrasis orinis greitis ir
- Page 169 and 170:
Standartiniais ženklais žymimos V
- Page 171 and 172:
Svarbiausia FMS funkcija (skrydžio
- Page 173 and 174:
arba kai sugenda FMCS. Kad pilotas
- Page 175 and 176:
2.2.4 pav. Informacijos srautų jud
- Page 177 and 178:
Ištrinti (ERASE) Tai nurodymas pan
- Page 179 and 180:
2.2.7. Pagrindiniai FMS procesai Pa
- Page 181 and 182:
AFCS polinkio kanalą. Valdymas ver
- Page 183 and 184:
2.3.1 pav. FDS architektūra 2.3.2
- Page 185 and 186:
Atvirkščiai, posvyrio juostelės
- Page 187 and 188:
Jei vėliau pasirenkamas kitas orla
- Page 189 and 190:
4. Kai orlaivis yra horizontalioje
- Page 191 and 192:
Pakilimui, kai įjungtas skrydžio
- Page 193 and 194:
2.4.1. AFCS klasifikacija AFCS komp
- Page 195 and 196:
ar polinkio komandos įvedamos rank
- Page 197 and 198:
2.4.8 pav. Aukščio užėmimo rež
- Page 199 and 200:
Kompiuterio galia kinta priklausoma
- Page 201 and 202:
gėjimui) gali būti padidintas, na
- Page 203 and 204:
Prieš užimant spindulį, orlaivis
- Page 205 and 206:
2.4.16 pav. Automatinės trimerio s
- Page 207 and 208:
Pavyzdžiui, orlaiviui pasvirus į
- Page 209 and 210:
Apsisprendimo aukščio nėra 1. Į
- Page 211 and 212:
3C kategorija: operacijos iki KTT i
- Page 213 and 214:
Maksimalioji ilgalaikė trauka (MCT
- Page 215 and 216:
pat realizuoja variklio slėgio san
- Page 217 and 218:
2.6.2 pav. Tipinė automatinės tra
- Page 219 and 220:
kontrolę, jei ji reikalinga. Šis
- Page 221 and 222:
2.7.2 pav. Skrydžio lygio įspėja
- Page 223 and 224:
ties būseną ir prireikus yra pasi
- Page 225 and 226:
Savarakiškas reagavimas pagal gali
- Page 227 and 228:
2.7.7 pav. Įspėjimų sąlygų dia
- Page 229 and 230:
Režimas 7 Aktyvuojantis šiam rež
- Page 231 and 232:
TCAS III Ši sistema turi tokias pa
- Page 233 and 234:
- TCAS II siųstuvai, esantys orlai
- Page 235 and 236:
Nurodymai pateikiami rodant dalį V
- Page 237 and 238:
2.7.19 pav. Leistinojo greičio gra
- Page 239 and 240:
2.7.22 pav. Alfa daviklio konstrukc
- Page 241 and 242:
Valdymo įrenginys prie viršutinio
- Page 243 and 244:
Eksploataciniai ryšio duomenų reg
- Page 245 and 246:
3.1.1 pav. Temperatūros padidėjim
- Page 247 and 248:
Vielinio TE varžos R priklausomyb
- Page 249 and 250:
Priklausomai nuo matmenų ir geomet
- Page 251 and 252:
- reaktyvinių variklių tūtų iš
- Page 253 and 254:
3.1.15 pav. Išmetamųjų dujų sra
- Page 255 and 256:
Pagal tiltelio įstrižainę įjung
- Page 257 and 258:
Veikiančios pagal tokį principą
- Page 259 and 260:
3.2.1 pav. Tiesioginio nuskaitymo m
- Page 261 and 262:
3.2.4 pav. Konstrukcinė manometro
- Page 263 and 264:
3.2.8 pav. Slėgio matavimų rodikl
- Page 265 and 266:
3.2.13 pav. Mišrusis manometro sl
- Page 267 and 268:
3.3.1 pav. Magnetoindukcinio tachom
- Page 269 and 270:
3.3.3 pav. Tachometro su diskiniu J
- Page 271 and 272:
Matuojant variklių sūkių dažnį
- Page 273 and 274:
3.3.9 pav. Variklio sūkių momento
- Page 275 and 276:
slinkis pagal kuro lygį keičiamas
- Page 277 and 278:
Daviklių konstrukcijos. Kaip matyt
- Page 279 and 280:
3.4.8 pav. Kuro kiekio matuoklio pr
- Page 281 and 282:
Pasikeitus kuro temperatūrai arba
- Page 283 and 284:
3.4.14 pav. Bako tipinis talpinis (
- Page 285 and 286:
(3.4.10 pav.), kurie kuro tiekimo
- Page 287 and 288:
Įrašę (3.17.) į (3.18), gausime
- Page 289 and 290:
3.4.21 pav. Integruojančiojo sąna
- Page 291 and 292:
Kuro tankio pakitimai sukelia reik
- Page 293 and 294:
pagreičio, todėl matuojant vibrac
- Page 295 and 296:
vus tiekiama nustatyto dažnio įta
- Page 297 and 298:
3.6.3 pav. Sukimo momento slėgio s
- Page 299 and 300:
Pakitus suslėgimo laipsniui, atsir
- Page 301 and 302:
3.7.3 pav. Variklių informacijos a
- Page 303 and 304:
Vaizduokliuose indeksai, ženklai,
- Page 305 and 306:
3.8.2. ECAM architektūra ECAM arch
- Page 307 and 308:
LITERATŪRA Cbyron, E. 1995. Radar: