
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
■ NYHETER<br />
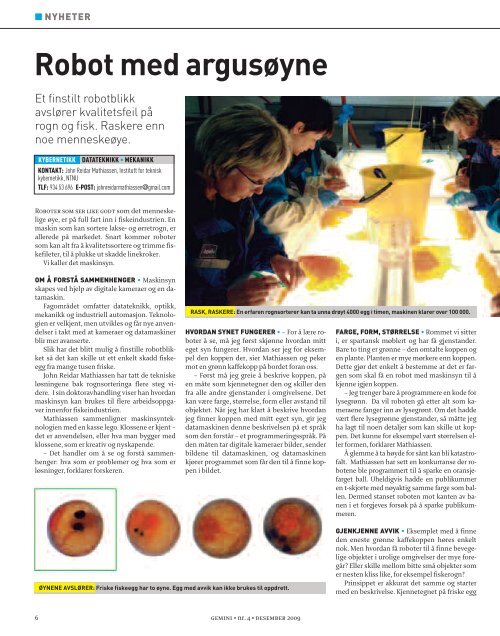
Robot med argusøyne<br />
Et finstilt robotblikk<br />
avslører kvalitetsfeil <strong>på</strong><br />
rogn og fisk. Raskere enn<br />
noe menneskeøye.<br />
Roboter som ser like godt som det menneskelige<br />
øye, er <strong>på</strong> full fart inn i fiskeindustrien. En<br />
maskin som kan sortere lakse- og ørretrogn, er<br />
allerede <strong>på</strong> markedet. Snart kommer roboter<br />
som kan alt fra å kvalitetssortere og trimme fiskefileter,<br />
til å plukke ut skadde linekroker.<br />
Vi kaller det maskinsyn.<br />
OM Å FORSTÅ SAMMENHENGER • Maskinsyn<br />
skapes ved hjelp av digitale kameraer og en datamaskin.<br />
Fagområdet omfatter datateknikk, optikk,<br />
mekanikk og industriell automasjon. Teknologien<br />
er velkjent, men utvikles og får nye anvendelser<br />
i takt med at kameraer og datamaskiner<br />
blir mer avanserte.<br />
Slik har det blitt mulig å finstille robotblikket<br />
så det kan skille ut ett enkelt skadd fiskeegg<br />
fra mange tusen friske.<br />
John Reidar Mathiassen har tatt de tekniske<br />
løsningene bak rognsorteringa flere steg videre.<br />
I sin doktoravhandling viser han hvordan<br />
maskinsyn kan brukes til flere arbeidsoppgaver<br />
innenfor fiskeindustrien.<br />
Mathiassen sammenligner maskinsynteknologien<br />
med en kasse lego. Klossene er kjent –<br />
det er anvendelsen, eller hva man bygger med<br />
klossene, som er kreativ og nyskapende.<br />
– Det handler om å se og forstå sammenhenger:<br />
hva som er problemer og hva som er<br />
løsninger, forklarer forskeren.<br />
6<br />
KYBERNETIKK<br />
DATATEKNIKK • MEKANIKK<br />
KONTAKT: John Reidar Mathiassen, Institutt for teknisk<br />
kybernetikk, <strong>NTNU</strong><br />
TLF: 934 53 696 E-POST: johnreidarmathiassen@gmail.com<br />
RASK, RASKERE: En erfaren rognsorterer kan ta unna drøyt 4000 egg i timen, maskinen klarer over 100 000.<br />
HVORDAN SYNET FUNGERER • – For å lære roboter<br />
å se, må jeg først skjønne hvordan mitt<br />
eget syn fungerer. Hvordan ser jeg for eksempel<br />
den koppen der, sier Mathiassen og peker<br />
mot en grønn kaffekopp <strong>på</strong> bordet foran oss.<br />
– Først må jeg greie å beskrive koppen, <strong>på</strong><br />
en måte som kjennetegner den og skiller den<br />
fra alle andre gjenstander i omgivelsene. Det<br />
kan være farge, størrelse, form eller avstand til<br />
objektet. Når jeg har klart å beskrive hvordan<br />
jeg finner koppen med mitt eget syn, gir jeg<br />
datamaskinen denne beskrivelsen <strong>på</strong> et språk<br />
som den forstår – et programmeringsspråk. På<br />
den måten tar digitale kameraer bilder, sender<br />
bildene til datamaskinen, og datamaskinen<br />
kjører programmet som får den til å finne koppen<br />
i bildet.<br />
ØYNENE AVSLØRER: Friske fiskeegg har to øyne. Egg med avvik kan ikke brukes til oppdrett.<br />
<strong>gemini</strong> • nr. 4 • desember 2009<br />
FARGE, FORM, STØRRELSE • Rommet vi sitter<br />
i, er spartansk møblert og har få gjenstander.<br />
Bare to ting er grønne – den omtalte koppen og<br />
en plante. Planten er mye mørkere enn koppen.<br />
Dette gjør det enkelt å bestemme at det er fargen<br />
som skal få en robot med maskinsyn til å<br />
kjenne igjen koppen.<br />
– Jeg trenger bare å programmere en kode for<br />
lysegrønn. Da vil roboten gå etter alt som kameraene<br />
fanger inn av lysegrønt. Om det hadde<br />
vært flere lysegrønne gjenstander, så måtte jeg<br />
ha lagt til noen detaljer som kan skille ut koppen.<br />
Det kunne for eksempel vært størrelsen eller<br />
formen, forklarer Mathiassen.<br />
Å glemme å ta høyde for sånt kan bli katastrofalt.<br />
Mathiassen har sett en konkurranse der robotene<br />
ble programmert til å sparke en oransjefarget<br />
ball. Uheldigvis hadde en publikummer<br />
en t-skjorte med nøyaktig samme farge som ballen.<br />
Dermed stanset roboten mot kanten av banen<br />
i et forgjeves forsøk <strong>på</strong> å sparke publikummeren.<br />
GJENKJENNE AVVIK • Eksemplet med å finne<br />
den eneste grønne kaffekoppen høres enkelt<br />
nok. Men hvordan få roboter til å finne bevegelige<br />
objekter i urolige omgivelser der mye foregår?<br />
Eller skille mellom bitte små objekter som<br />
er nesten kliss like, for eksempel fiskerogn?<br />
Prinsippet er akkurat det samme og starter<br />
med en beskrivelse. Kjennetegnet <strong>på</strong> friske egg