Medição da Temperatura - Mecatrônica Atual
Medição da Temperatura - Mecatrônica Atual
Medição da Temperatura - Mecatrônica Atual

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
seu eixo de saí<strong>da</strong>, pois uma volta completa<br />
tem 360 º e dividindo-a por 200 passos nos<br />
<strong>da</strong>rá um ângulo de 1,8 º conforme mostrado<br />
na equação 1, logo, o rotor deste motor de<br />
passo tem a capaci<strong>da</strong>de de mover-se apenas<br />
de 1,8 º em 1,8 º.<br />
360 ° / 200 passos = 1,8 °<br />
O movimento destes motores é realizado<br />
com a sequência correta de energização<br />
destas bobinas. Para este controle dispomos<br />
hoje de drivers e controladores como o CI<br />
L298 e o L297, fabricados pela empresa ST<br />
Microeletronics, dos quais podem ser feitos<br />
downloads de seus <strong>da</strong>tasheets pelo site www.<br />
st.com e que utilizamos em nosso projeto<br />
como veremos a seguir.<br />
Modos de operação de<br />
um motor de passo<br />
Como exemplo, utilizaremos a operação<br />
de passo completo 1 ou Full-Step.<br />
Neste tipo de operação apenas uma<br />
bobina é aciona<strong>da</strong> de ca<strong>da</strong> vez, fazendo com<br />
que o código binário seja menor, o torque<br />
e o consumo de energia sejam baixos e a<br />
veloci<strong>da</strong>de de rotação do motor seja mais<br />
alta do que nos motores operando em meio<br />
passo, ao lado seguem a figura 1 e a tabela<br />
1 com a sequência de acionamento.<br />
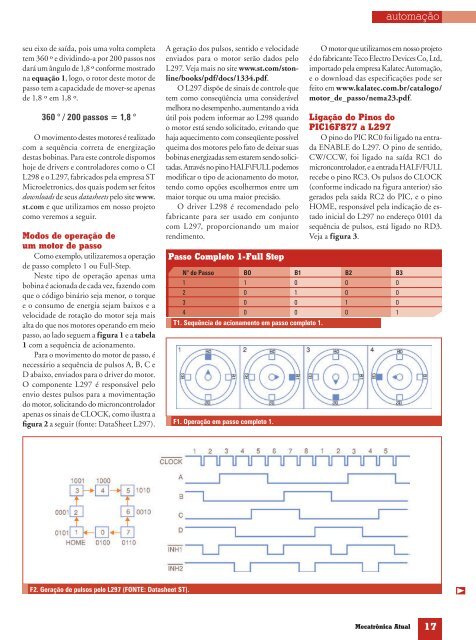
Para o movimento do motor de passo, é<br />
necessário a sequência de pulsos A, B, C e<br />
D abaixo, enviados para o driver do motor.<br />
O componente L297 é responsável pelo<br />
envio destes pulsos para a movimentação<br />
do motor, solicitando do microncontrolador<br />
apenas os sinais de CLOCK, como ilustra a<br />
figura 2 a seguir (fonte: DataSheet L297).<br />
F2. Geração de pulsos pelo L297 (FONTE: Datasheet ST).<br />
A geração dos pulsos, sentido e veloci<strong>da</strong>de<br />
enviados para o motor serão <strong>da</strong>dos pelo<br />
L297. Veja mais no site www.st.com/stonline/books/pdf/docs/1334.pdf.<br />
O L297 dispõe de sinais de controle que<br />
tem como conseqüência uma considerável<br />
melhora no desempenho, aumentando a vi<strong>da</strong><br />
útil pois podem informar ao L298 quando<br />
o motor está sendo solicitado, evitando que<br />
haja aquecimento com conseqüente possível<br />
queima dos motores pelo fato de deixar suas<br />
bobinas energiza<strong>da</strong>s sem estarem sendo solicita<strong>da</strong>s.<br />
Através no pino HALF\FULL podemos<br />
modificar o tipo de acionamento do motor,<br />
tendo como opções escolhermos entre um<br />
maior torque ou uma maior precisão.<br />
O driver L298 é recomen<strong>da</strong>do pelo<br />
fabricante para ser usado em conjunto<br />
com L297, proporcionando um maior<br />
rendimento.<br />
Passo Completo 1-Full Step<br />
N° do Passo<br />
1<br />
2<br />
3<br />
4<br />
BO<br />
T1. Sequência de acionamento em passo completo 1.<br />
F1. Operação em passo completo 1.<br />
1<br />
0<br />
0<br />
0<br />
B1<br />
0<br />
1<br />
0<br />
0<br />
<strong>Mecatrônica</strong> <strong>Atual</strong><br />
automação<br />
O motor que utilizamos em nosso projeto<br />
é do fabricante Teco Electro Devices Co, Ltd,<br />
importado pela empresa Kalatec Automação,<br />
e o download <strong>da</strong>s especificações pode ser<br />
feito em www.kalatec.com.br/catalogo/<br />
motor_de_passo/nema23.pdf.<br />
Ligação do Pinos do<br />
PIC16F877 a L297<br />
O pino do PIC RC0 foi ligado na entra<strong>da</strong><br />
ENABLE do L297. O pino de sentido,<br />
CW/CCW, foi ligado na saí<strong>da</strong> RC1 do<br />
microncontrolador, e a entra<strong>da</strong> HALF/FULL<br />
recebe o pino RC3. Os pulsos do CLOCK<br />
(conforme indicado na figura anterior) são<br />
gerados pela saí<strong>da</strong> RC2 do PIC, e o pino<br />
HOME, responsável pela indicação de estado<br />
inicial do L297 no endereço 0101 <strong>da</strong><br />
sequência de pulsos, está ligado no RD3.<br />
Veja a figura 3.<br />
B2<br />
0<br />
0<br />
1<br />
0<br />
B3<br />
0<br />
0<br />
0<br />
1<br />
17