Enerpac Workholding Catalog Português - Schalcher Engineering GmbH
A Schalcher Engineering GmbH apresenta a você as melhores Workholding da Enerpac, Se você tiver alguma dúvida, entre em contato conosco pessoalmente em +41 71 950 12 77 ou visite nosso site em www.enerpac-shop.ch. Cilindros Giratórios Cilindros Giratórios Enerpac Collet-lok combinam a atuação rotacional com a força de fixação de um Cilindro Giratório hidráulico com mecanismo interno de trava que preserva a força de fixação aplicada sem manter a pressão hidráulica no cilindro. Ideal para utilização em dispositivos de larga escala, estão disponiveis em modelos de 4,4, 8,9 e 37,8 kn. Os modelos padrão estão disponíveis em configurações tanto deCorpo Rosqueado como de Flange Inferior. Vedações em Viton são padrão, Modificações disponiveis incluem flange superior com manifold de saídas múltiplas, cursos mais longos, versões não rotacionais e projetos especiais de corpo. Cilindro de Apoio Cilindro de Empurrar Enerpac Collet-lok usam a força da mola interna para levantar a haste de apoio no contato com a peça de trabalho e depois manter o apoio com o sistema de bloqueio interno. Modificações disponíveis incluem cursos mais longos, flange superior com manifold de saídas múltiplas e projetos especiais de corpo. Classificados com capacidades estão disponíveis em modelos de Corpo Rosqueado (somente 8,9 e 17,8 kN) e de Flange Inferior (8,9 17,8, e 44,5 kN). Vedações em Viton são padrão. Cilindros de Empurrar Cilindros de Empurrar Enerpac Collet-lok são projetados para aplicações tanto de fixação como de apoio.Em capacidades de 11,1 ou 22,2 kN, estes cilindros estão disponíveis em modelos de Corpo Rosqueado e Flange Inferior. A força de fixação ou de apoio é mantida quando a trava interna está envolvida. Modificações disponíveis incluem flange superior com manifld de saídas múltiplas, cursos mais longos e projetos especiais de corpo. Vedações em Viton são padrão.
A Schalcher Engineering GmbH apresenta a você as melhores Workholding da Enerpac, Se você tiver alguma dúvida, entre em contato conosco pessoalmente em +41 71 950 12 77 ou visite nosso site em www.enerpac-shop.ch.
Cilindros Giratórios
Cilindros Giratórios Enerpac Collet-lok combinam a atuação rotacional com a força de fixação de um Cilindro Giratório hidráulico com mecanismo interno de trava que preserva a força de fixação aplicada sem manter a pressão hidráulica no cilindro. Ideal para utilização em dispositivos de larga escala, estão disponiveis em modelos de 4,4, 8,9 e 37,8 kn. Os modelos padrão estão disponíveis em configurações tanto deCorpo Rosqueado como de Flange Inferior. Vedações em Viton são padrão, Modificações disponiveis incluem flange superior com manifold de saídas múltiplas, cursos mais longos, versões não rotacionais e projetos especiais de corpo.
Cilindro de Apoio
Cilindro de Empurrar Enerpac Collet-lok usam a força da mola interna para levantar a haste de apoio no contato com a peça de trabalho e depois manter o apoio com o sistema de bloqueio interno. Modificações disponíveis incluem cursos mais longos, flange superior com manifold de saídas múltiplas e projetos especiais de corpo. Classificados com capacidades estão disponíveis em modelos de Corpo Rosqueado (somente 8,9 e 17,8 kN) e de Flange Inferior (8,9 17,8, e 44,5 kN). Vedações em Viton são padrão.
Cilindros de Empurrar
Cilindros de Empurrar Enerpac Collet-lok são projetados para aplicações tanto de fixação como de apoio.Em capacidades de 11,1 ou 22,2 kN, estes cilindros estão disponíveis em modelos de Corpo Rosqueado e Flange Inferior. A força de fixação ou de apoio é mantida quando a trava interna está envolvida. Modificações disponíveis incluem flange superior com manifld de saídas múltiplas, cursos mais longos e projetos especiais de corpo. Vedações em Viton são padrão.

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Válvulas com bobina<br />
2.1.3 Localizando uma Peça<br />
Uma vez que a localização de uma peça<br />
não exige, necessariamente, a eliminação<br />
do movimento em todos os seis graus de<br />
liberdade, as três técnicas de localização<br />
descritas abaixo são usadas na prática.<br />
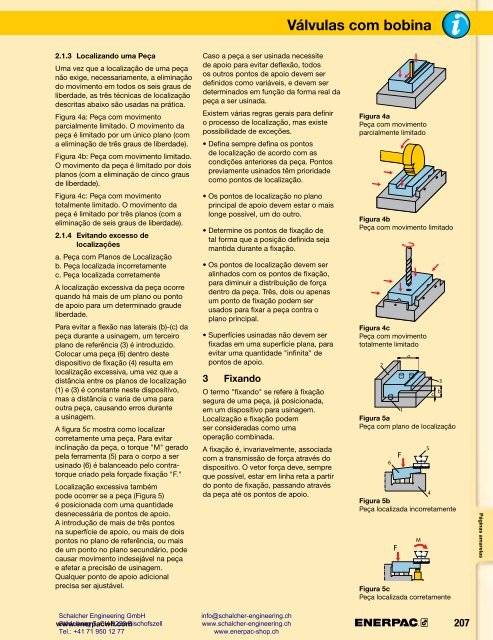
Figura 4a: Peça com movimento<br />
parcialmente limitado. O movimento da<br />
peça é limitado por um único plano (com<br />
a eliminação de três graus de liberdade).<br />
Figura 4b: Peça com movimento limitado.<br />
O movimento da peça é limitado por dois<br />
planos (com a eliminação de cinco graus<br />
de liberdade).<br />
Figura 4c: Peça com movimento<br />
totalmente limitado. O movimento da<br />
peça é limitado por três planos (com a<br />
eliminação de seis graus de liberdade).<br />
2.1.4 Evitando excesso de<br />
localizações<br />
a. Peça com Planos de Localização<br />
b. Peça localizada incorretamente<br />
c. Peça localizada corretamente<br />
A localização excessiva da peça ocorre<br />
quando há mais de um plano ou ponto<br />
de apoio para um determinado graude<br />
liberdade.<br />
Para evitar a flexão nas laterais (b)-(c) da<br />
peça durante a usinagem, um terceiro<br />
plano de referência (3) é introduzido.<br />
Colocar uma peça (6) dentro deste<br />
dispositivo de fixação (4) resulta em<br />
localização excessiva, uma vez que a<br />
distância entre os planos de localização<br />
(1) e (3) é constante neste dispositivo,<br />
mas a distância c varia de uma para<br />
outra peça, causando erros durante<br />
a usinagem.<br />
A figura 5c mostra como localizar<br />
corretamente uma peça. Para evitar<br />
inclinação da peça, o torque "M" gerado<br />
pela ferramenta (5) para o corpo a ser<br />
usinado (6) é balanceado pelo contratorque<br />
criado pela forçade fixação "F."<br />
Localização excessiva também<br />
pode ocorrer se a peça (Figura 5)<br />
é posicionada com uma quantidade<br />
desnecessária de pontos de apoio.<br />
A introdução de mais de três pontos<br />
na superfície de apoio, ou mais de dois<br />
pontos no plano de referência, ou mais<br />
de um ponto no plano secundário, pode<br />
causar movimento indesejável na peça<br />
e afetar a precisão de usinagem.<br />
Qualquer ponto de apoio adicional<br />
precisa ser ajustável.<br />
Caso a peça a ser usinada necessite<br />
de apoio para evitar deflexão, todos<br />
os outros pontos de apoio devem ser<br />
definidos como variáveis, e devem ser<br />
determinados em função da forma real da<br />
peça a ser usinada.<br />
Existem várias regras gerais para definir<br />
o processo de localização, mas existe<br />
possibilidade de exceções.<br />
• Defina sempre defina os pontos<br />
de localização de acordo com as<br />
condições anteriores da peça. Pontos<br />
previamente usinados têm prioridade<br />
como pontos de localização.<br />
Figura 4a<br />
Peça com movimento<br />
parcialmente limitado<br />
• Os pontos de localização no plano<br />
principal de apoio devem estar o mais<br />
longe possível, um do outro.<br />
• Determine os pontos de fixação de<br />
tal forma que a posição definida seja<br />
mantida durante a fixação.<br />
• Os pontos de localização devem ser<br />
alinhados com os pontos de fixação,<br />
para diminuir a distribuição de força<br />
dentro da peça. Três, dois ou apenas<br />
um ponto de fixação podem ser<br />
usados para fixar a peça contra o<br />
plano principal.<br />
• Superfícies usinadas não devem ser<br />
fixadas em uma superfície plana, para<br />
evitar uma quantidade "infinita" de<br />
pontos de apoio.<br />
3 Fixando<br />
O termo "fixando" se refere à fixação<br />
segura de uma peça, já posicionada,<br />
em um dispositivo para usinagem.<br />
Localização e fixação podem<br />
ser consideradas como uma<br />
operação combinada.<br />
A fixação é, invariavelmente, associada<br />
com a transmissão de força através do<br />
dispositivo. O vetor força deve, sempre<br />
que possível, estar em linha reta a partir<br />
do ponto de fixação, passando através<br />
da peça até os pontos de apoio.<br />
Figura 4b<br />
Peça com movimento limitado<br />
Figura 4c<br />
Peça com movimento<br />
totalmente limitado<br />
Figura 5a<br />
Peça com plano de localização<br />
Figura 5b<br />
Peça localizada incorretamente<br />
Figura 5c<br />
Peça localizada corretamente<br />
Páginas amarelas<br />
<strong>Schalcher</strong> <strong>Engineering</strong> <strong>GmbH</strong><br />
info@schalcher-engineering.ch<br />
www.enerpacwh.com Städeliweg 7, CH-9220 Bischofszell<br />
www.schalcher-engineering.ch<br />
® 207<br />
Tel.: +41 71 950 12 77<br />
www.enerpac-shop.ch