

Robótica J. A. M. Felippe de Souza 8. - Robôs antropomórficos - UBI
Robótica J. A. M. Felippe de Souza 8. - Robôs antropomórficos - UBI
Robótica J. A. M. Felippe de Souza 8. - Robôs antropomórficos - UBI
- TAGS
- felippe
- souza
- webx.ubi.pt

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
J. A. M. <strong>Felippe</strong> <strong>de</strong> <strong>Souza</strong> <strong>8.</strong> - Robots <strong>antropomórficos</strong><br />
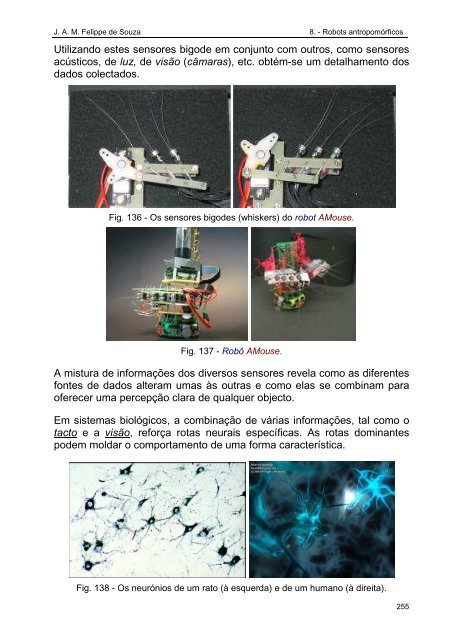
Utilizando estes sensores bigo<strong>de</strong> em conjunto com outros, como sensores<br />
acústicos, <strong>de</strong> luz, <strong>de</strong> visão (câmaras), etc. obtém-se um <strong>de</strong>talhamento dos<br />
dados colectados.<br />
Fig. 136 - Os sensores bigo<strong>de</strong>s (whiskers) do robot AMouse.<br />
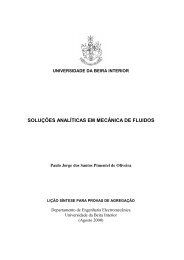
Fig. 137 - Robô AMouse.<br />
A mistura <strong>de</strong> informações dos diversos sensores revela como as diferentes<br />
fontes <strong>de</strong> dados alteram umas às outras e como elas se combinam para<br />
oferecer uma percepção clara <strong>de</strong> qualquer objecto.<br />
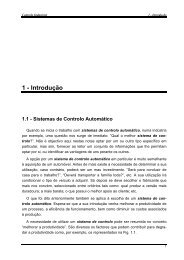
Em sistemas biológicos, a combinação <strong>de</strong> várias informações, tal como o<br />
tacto e a visão, reforça rotas neurais específicas. As rotas dominantes<br />
po<strong>de</strong>m moldar o comportamento <strong>de</strong> uma forma característica.<br />
Fig. 138 - Os neurónios <strong>de</strong> um rato (à esquerda) e <strong>de</strong> um humano (à direita).<br />
255









![A História dos Computadores – [texto de 11 páginas] - UBI](https://img.yumpu.com/12922164/1/184x260/a-historia-dos-computadores-texto-de-11-paginas-ubi.jpg?quality=85)

