

tkuhh glphqvlrqdo vhqvru vfdqqhu - Chalmers tekniska högskola
tkuhh glphqvlrqdo vhqvru vfdqqhu - Chalmers tekniska högskola
tkuhh glphqvlrqdo vhqvru vfdqqhu - Chalmers tekniska högskola

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
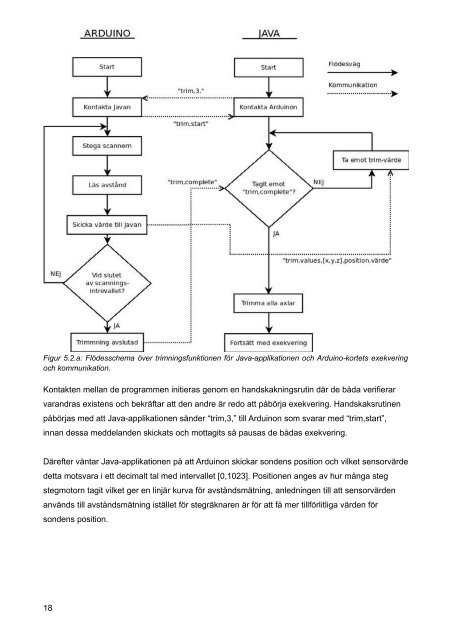
Figur 5.2.a: Flödesschema över trimningsfunktionen för Java-applikationen och Arduino-kortets exekvering<br />
och kommunikation.<br />
Kontakten mellan de programmen initieras genom en handskakningsrutin där de båda verifierar<br />
varandras existens och bekräftar att den andre är redo att påbörja exekvering. Handskaksrutinen<br />
påbörjas med att Java-applikationen sänder “trim,3,” till Arduinon som svarar med “trim,start”,<br />
innan dessa meddelanden skickats och mottagits så pausas de bådas exekvering.<br />
Därefter väntar Java-applikationen på att Arduinon skickar sondens position och vilket sensorvärde<br />
detta motsvara i ett decimalt tal med intervallet [0,1023]. Positionen anges av hur många steg<br />
stegmotorn tagit vilket ger en linjär kurva för avståndsmätning, anledningen till att sensorvärden<br />
används till avståndsmätning istället för stegräknaren är för att få mer tillförlitliga värden för<br />
sondens position.<br />
18














