Robot Stäubli RX90
Robot Stäubli RX90
Robot Stäubli RX90

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
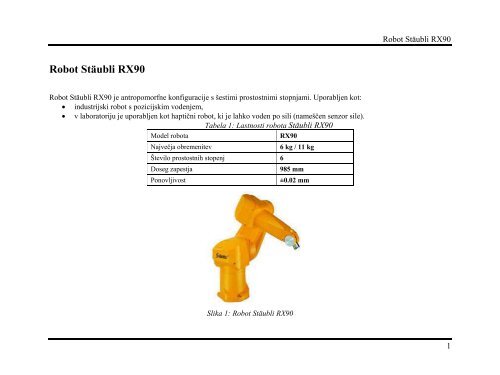
<strong>Robot</strong> Stäubli <strong>RX90</strong> je antropomorfne konfiguracije s šestimi prostostnimi stopnjami. Uporabljen kot:<br />
• industrijski robot s pozicijskim vodenjem,<br />
• v laboratoriju je uporabljen kot haptični robot, ki je lahko voden po sili (nameščen senzor sile).<br />
Tabela 1: Lastnosti robota Stäubli <strong>RX90</strong><br />
Model robota<br />
<strong>RX90</strong><br />
Največja obremenitev<br />
6 kg / 11 kg<br />
Število prostostnih stopenj 6<br />
Doseg zapestja<br />
985 mm<br />
Ponovljivost<br />
±0.02 mm<br />
Slika 1: <strong>Robot</strong> Stäubli <strong>RX90</strong><br />
1
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija pozicije (smer X)<br />
1) Določimo napako (e x ) med referenčno (x r ) in dejansko pozicijo (x) vrha robota:<br />
e x<br />
= x r<br />
− x<br />
2) Izračunamo hitrost (v x ) potrebna za zmanjšanje napake (e x ) množena z ustreznim<br />
ojačenjem (K p ):<br />
vx<br />
= K p<br />
⋅e x<br />
2
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija pozicije (napaka pozitivna)<br />
e x<br />
=<br />
x r<br />
−<br />
x<br />
e x > 0 → v x > 0<br />
motor se začne vrteti navzgor in<br />
napaka se zmanjša<br />
v x<br />
v<br />
x<br />
=<br />
K<br />
p<br />
⋅e<br />
x<br />
3
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija pozicije (napaka negativna)<br />
e x<br />
=<br />
x r<br />
−<br />
x<br />
e x < 0 → v x < 0<br />
motor se začne vrteti navzdol<br />
in napaka se zmanjša<br />
v x<br />
v<br />
x<br />
=<br />
K<br />
p<br />
⋅e<br />
x<br />
4
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija pozicije (ni napake)<br />
e x<br />
e x<br />
= x − x<br />
r<br />
= 0<br />
e x = 0 → v x = 0<br />
motor miruje saj ni potrebe<br />
po premiku<br />
v x<br />
v<br />
x<br />
= K ⋅e<br />
p x<br />
= 0<br />
5
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija pozicije<br />
6
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Senzor sil in navorov JR3 85M35A-I40<br />
Slika 3: Senzor sil in navorov nameščen na vrh robota Stäubli<br />
Veličina Razpon Resolucija<br />
Sila X, Y (Fx, Fy) 200 N 0.05 N<br />
Sila Z (Fz) 400 N 0.1 N<br />
Navor X, Y, Z (Mx, My, Mz) 12 Nm 0.003 Nm<br />
7
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija sile (smer Z)<br />
1) Določimo napako (e F ) med referenčno (Fz r ) in dejansko silo (Fz):<br />
e<br />
F<br />
= Fzr<br />
− Fz<br />
2) Izračunamo napetost (u z ) potrebna za zmanjšanje napake (e F ) množena z<br />
ustreznim ojačenjem (K f ):<br />
u<br />
z<br />
= K<br />
f<br />
⋅e F<br />
8
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija sile – ni kontakta z okoljem<br />
u z<br />
eF<br />
eF<br />
eF ... napaka sile (eF = 1 N)<br />
Fz r ... referenčna oz. željena sila<br />
(Fz r = 1 N)<br />
Fz ... trenutna merjena sila oz. sila<br />
kontakta (Fz = 0 N)<br />
u<br />
z<br />
=<br />
=<br />
K<br />
Fz<br />
f<br />
r<br />
−<br />
⋅eF<br />
Fz<br />
eF ... napaka sile<br />
K f ... ojačanje napake in preračun v<br />
napetost<br />
u z ... napetost na motorju<br />
eF > 0 → u z > 0 ⇒ motor se začne vrteti navzgor<br />
9
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija sile – pride do kontakta z okoljem<br />
eF<br />
eF = Fzr − Fz<br />
eF ... napaka sile (eF = 0.9999 N)<br />
Fz r ... referenčna oz. željena sila<br />
(Fz r = 1 N)<br />
Fz ... trenutna merjena sila oz. sila<br />
kontakta (Fz = 0 N)<br />
u z<br />
u<br />
= K<br />
⋅eF<br />
z f<br />
eF ... napaka sile<br />
K f ... ojačanje napake in preračun<br />
v napetost<br />
u z ... napetost na motorju<br />
eF > 0 → u z > 0 ⇒ pride do kontakta z okoljem – motor se<br />
vrti še vedno navzgor<br />
10
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija sile – pritisk v okolje<br />
eF<br />
eF Fz − r<br />
Fz<br />
eF ... napaka sile (eF = 0.5 N)<br />
Fz r ... referenčna oz. željena sila (Fz r =<br />
1 N)<br />
Fz ... trenutna merjena sila oz. sila<br />
kontakta (Fz = 0.5 N)<br />
=<br />
eF<br />
u z<br />
=<br />
K f<br />
⋅<br />
eF ... napaka sile<br />
K f ... ojačanje napake in preračun v<br />
napetost<br />
u z ... napetost na motorju<br />
u z<br />
eF > 0 → u z > 0 ⇒ pritisk v okolje – motor se<br />
vrti še vedno<br />
11
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija sile – izenačenje sil<br />
eF<br />
eF Fz − r<br />
Fz<br />
eF ... napaka sile (eF = 0 N)<br />
Fz r ... referenčna oz. željena sila (Fz r<br />
= 1 N)<br />
Fz ... trenutna merjena sila oz. sila<br />
kontakta (Fz = 1 N)<br />
= eF<br />
u z<br />
u<br />
z<br />
=<br />
K<br />
eF ... napaka sile<br />
K f ... ojačanje napake in preračun v<br />
napetost<br />
u z ... napetost na motorju<br />
eF = 0 → u z = 0 ⇒ sila kontakta je enaka<br />
referenčni sili, zato se motor ustavi<br />
f<br />
⋅<br />
12
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Vodenje robota – regulacija sile – izenačenje sil<br />
13
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Navodila za izvedbo vaje<br />
1) Uporabniški vmesnik na levem zaslonu bi moral izgledati podobno kot na sliki 4, na desnem zaslonu pa je prikazana<br />
vizualizacija in okno MATLAB-a (slika 5).<br />
Okno programa<br />
AdeptWindows PC<br />
Grafični uporabniški<br />
vmesnik StaubliGUI<br />
Zaganjanje in<br />
ustavljanje krmilnika<br />
Izbira načina<br />
vodenja<br />
Statusno okno<br />
Slika 4: Okna na levem namizju: AdeptWindows PC in StaubliGUI<br />
14
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Slika 5: Okna na desnem namizju: vizualizacija in MATLB okno<br />
15
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
2) V MATLAB-u se premaknete v vaš delovni direktorij z ukazom cd e:\vaje\rips\staublixpc, ki ga zapišete v ukazno<br />
vrstico MATLAB-a.<br />
3) Z ukazom uiopen('staubli_rips_fc.mdl',1) odprete vašo shemo, ki je prikazana na sliki 6. Z dvojnim klikom na rdeč blok<br />
rtForceControl se vam odpre urejevalnik programske kode Embedded MATLAB Editor.<br />
Slika 6: Shema načina vodenja Force control.<br />
16
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
4) S tem ste odprli pripravljeno predlogo za pisanje programa (Slika 7). Urejevalnik Embedded MATLAB Editor boste<br />
uporabljali samo za pisanje programa in ne za prevajanje ter njegovo poganjanje.<br />
Slika 7: Odprta predloga v programskem urejevalniku Embedded MATLAB Editor<br />
17
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
5) Vaša naloga je, da napišete tri neodvisne programe:<br />
a) Program za regulacijo položaja vrha robota. Vrh robota naj kroži po krožnici z radijem 0.05 m (enote so metri) v<br />
ravnini YZ (X = X0), s frekvenco 1 Hz.<br />
Enačbe kroženja v sferičnih (krogelnih) koordinatah:<br />
x<br />
y<br />
ω =<br />
2⋅π<br />
⋅ν<br />
b) Program za regulacijo sile v vseh treh smereh (X,Y,Z) globalnega koordinatnega sistema, kjer človek z roko<br />
vodi robot po prostoru. V tem primeru je potrebno upoštevati I. Newtonov zakon, saj mora biti v tem primeru<br />
referenčna sila enaka 0.<br />
c) Program za regulacijo sile v smeri X globalnega koordinatnega sistema in regulacijo položaja v ravnini YZ. Tu<br />
naj robot s silo kontakta 1 N v smeri osi X riše krog po tabli.<br />
6) Ko končate z urejanjem vašo shemo prevedete z ukazom slbuild('staubli_rips') .<br />
=<br />
=<br />
r ⋅cos(<br />
ω ⋅t)<br />
r ⋅sin(<br />
ω ⋅t)<br />
18
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
7) Uporabniški vmesnik StaubliGUI zaženete z ukazom initall. Na sliki 8 je prikazan uporabniški vmesnik StaubliGUI je<br />
prikazan na sliki 7. Napisane programe lahko testiramo na dva načina:<br />
• s simulacijo robota Staubli,<br />
• z robotom Staubli.<br />
Slika 8: Grafični uporabniški vmesnik StaubliGUI<br />
19
<strong>Robot</strong> Stäubli <strong>RX90</strong><br />
Simulacija robota Staubli. Če želite poganjati simulacijo robota Staubli odprite z ukazom uiopen('Staubli_rt_vis',1)<br />
vizualizacijo robota Staubli. V uporabniškem vmesniku v polju Main Control pustite obkljukano možnost Simulation.<br />
Najprej zaženete krmilnik z klikom na gumb Start Staubli, ki se nahaja v polju Main Control. V polju User Control<br />
izberete možnost Force Control. S klikom Start Control zaženete vaše vodenje, z gumbom Hold <strong>Robot</strong> pa vodenje<br />
ustavite.<br />
Poganjanje na robotu Staubli. Vizualizacije vam ni potrebno zaganjati. V uporabniškem vmesniku v polju Main<br />
Control izključite možnost Simulation. Zaženete krmilnik z klikom na gumb Start Staubli, ki se nahaja v polju Main<br />
Control. V oknu programa AdeptWindows PC pritisniti tipko e in pritisniti zelen utripajoč gumb na<br />
kontrolni plošči robota (prikazana je na sliki 2). V polju User Control izberete možnost Force Control. S klikom<br />
Start Control zaženete vaše vodenje, z gumbom Hold <strong>Robot</strong> pa vodenje ustavite.<br />
Nadzorna plošča robota Stäubli<br />
Tipka, ki gori zeleno, ko je robot<br />
pripravljen za gibanje.<br />
Ko tipka utripa zeleno, jo je<br />
potrebno pritisniti.<br />
Tipka zasilnega<br />
ustavljanja robota<br />
Slika 2: Nadzorna plošča robota Stäubli<br />
20