2.3 Trdnost in elasticnost
2.3 Trdnost in elasticnost
2.3 Trdnost in elasticnost

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>2.3</strong> TRDNOST IN ELASTIČNOST 27<br />
<strong>2.3</strong> <strong>Trdnost</strong> <strong>in</strong> elastičnost<br />
V naravi popolnoma togih teles ni. Pri statiki <strong>in</strong> d<strong>in</strong>amiki predpostavljamo popolnoma toga telesa<br />
zaradi enostavnosti izračunov. Nauk o trdnosti <strong>in</strong> elastičnosti trdnih teles obravnava obnašanje elementov,<br />
ki prenašajo obremenitve <strong>in</strong> se zaradi tega deformirajo. <strong>Trdnost</strong> materialov je notranji odpor<br />
najmanjših delcev, ki se upirajo porušitvi <strong>in</strong> spremembi notranjih kohezijskih sil. Te sile delce vežejo<br />
<strong>in</strong> ohranjajo strukturo snovi.<br />
Zunanje obremenitve <strong>in</strong> momenti povzročajo na materialnem nosilcu notranje sile, ki se zoperstavljajo<br />
zunanjim. V primeru dovolj velike trdnosti se material m<strong>in</strong>imalno deformira, hkrati pa se hkrati<br />
vzpostavi ravnotežje med zunanjimi <strong>in</strong> notranjimi silami. Nauk o trdnosti <strong>in</strong> elastičnosti študira navedene<br />
odnose <strong>in</strong> razvija orodja <strong>in</strong> metode s katerimi moremo nosilnim elementom določiti optimalne<br />
dimenzije. Cilj je zagotavljanje primarne funkcionalnosti ob zagotovitvi varnosti <strong>in</strong> ekonomičnosti<br />
konstrukcije.<br />
<strong>2.3</strong>.1 Def<strong>in</strong>icija notranjih napetosti<br />
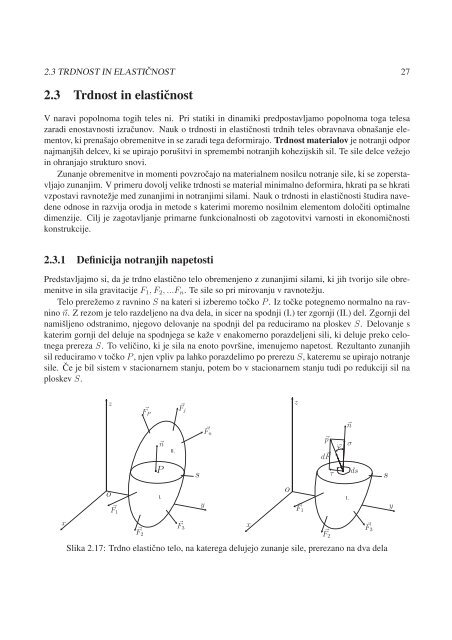
Predstavljajmo si, da je trdno elastično telo obremenjeno z zunanjimi silami, ki jih tvorijo sile obremenitve<br />
<strong>in</strong> sila gravitacije F1,F2,...Fn. Te sile so pri mirovanju v ravnotežju.<br />
Telo prerežemo z ravn<strong>in</strong>o S na kateri si izberemo točko P . Iz točke potegnemo normalno na ravn<strong>in</strong>o<br />
�n. Z rezom je telo razdeljeno na dva dela, <strong>in</strong> sicer na spodnji (I.) ter zgornji (II.) del. Zgornji del<br />
namišljeno odstranimo, njegovo delovanje na spodnji del pa reduciramo na ploskev S. Delovanje s<br />
katerim gornji del deluje na spodnjega se kaže v enakomerno porazdeljeni sili, ki deluje preko celotnega<br />
prereza S. To velič<strong>in</strong>o, ki je sila na enoto površ<strong>in</strong>e, imenujemo napetost. Rezultanto zunanjih<br />
sil reduciramo v točko P , njen vpliv pa lahko porazdelimo po prerezu S, kateremu se upirajo notranje<br />
sile. Če je bil sistem v stacionarnem stanju, potem bo v stacionarnem stanju tudi po redukciji sil na<br />
ploskev S.<br />
x<br />
z<br />
o<br />
�F1<br />
�F2<br />
�FP<br />
�n<br />
P<br />
I.<br />
II.<br />
�Fj<br />
�F3<br />
s<br />
y<br />
�Fn<br />
Slika 2.17: Trdno elastično telo, na katerega delujejo zunanje sile, prerezano na dva dela<br />
x<br />
o<br />
z<br />
�F1<br />
�p<br />
d � F<br />
�F2<br />
τ<br />
�n<br />
ϕ σ<br />
I.<br />
ds<br />
�F3<br />
s<br />
y
28 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
V točki P na diferencialni površ<strong>in</strong>i ds deluje sila d � F , česar posledica je splošna napetost �p. Projekcija<br />
napetosti �p na normalo predstavlja natezno napetost, ki jo označimo z grško črko σ, projekcija<br />
napetosti �p na ravn<strong>in</strong>o S pa predstavlja strižno napetost, ki jo označimo z grško črko τ. Dimenzija<br />
napetosti je N/m 2 . Če je normalna napetost usmerjena v smeri +�n, jo imenujemo natezno <strong>in</strong> označimo<br />
s simbolom +σ, če pa je usmerjena v smeri −�n, jo imenujemo tlačna <strong>in</strong> označimo s simbolom<br />
−σ. Tangencialna napetost, ki želi telo pristriči po ploskvi S, se imenuje strižna napetost. Njena<br />
usmerjenost ne vpliva na predznak <strong>in</strong> je vedno pozitivna, torej označena s simbolom +τ.<br />
Splošna napetost imenovana tudi specifična obremenitev �p v točki P je:<br />
�p = d� F<br />
ds<br />
kjer je d � F elementarna notranja sila. (2.24)<br />
Nateg oz. normalna napetost σ ter strig oz. tangencialna napetost τ pa sta:<br />
σ = �p cos ϕ<br />
τ = �p s<strong>in</strong> ϕ<br />
<strong>2.3</strong>.1.1 Središče tlaka <strong>in</strong> težišče ravn<strong>in</strong>skega lika<br />
|�p| = √ σ 2 + τ 2 (2.25)<br />
Kadar tlak ali nateg deluje enakomerno preko neke površ<strong>in</strong>e S, potem lahko nadomestimo to delovanje<br />
z rezultančno silo, ki prijemlje v težišču ravn<strong>in</strong>skega lika <strong>in</strong> ima velikost:<br />
F = σ<br />
A<br />
[ N<br />
m 2m2 = N] (2.26)<br />
Koord<strong>in</strong>ate težišča določimo preko momentne enačbe, saj mora biti uč<strong>in</strong>ek momenta enakomerno<br />
porazdeljene obremenitve enak uč<strong>in</strong>ku momenta rezultančne sile F .<br />
yi<br />
o<br />
xi<br />
x<br />
A<br />
p<br />
dAi<br />
Slika 2.18: Enakomerno razporejena obremenitev<br />
y<br />
yi<br />
xi<br />
Ploskovni moment je enak vsoti posameznih momentov:<br />
n�<br />
Ar = dAiri<br />
i=1<br />
Iz česar določimo koord<strong>in</strong>ate težišča:<br />
x =<br />
y =<br />
�n i=1 xi dAi<br />
�n i=1 dAi<br />
�n i=1 yi dAi<br />
�n i=1 dAi
<strong>2.3</strong> TRDNOST IN ELASTIČNOST 29<br />
<strong>2.3</strong>.1.2 Napetostni tenzor<br />
Če bi skozi točko P na sliki 2.20 izbrali drugo ravn<strong>in</strong>o, bi ploskev imela drugo normalo �n ′ . Ker je<br />
splošna napetost �p enaka, dobimo drugačen kot ϕ ′ ter drugačno tlačno <strong>in</strong> strižno komponento napetosti<br />
σ ′ <strong>in</strong> τ ′ . Skozi točko lahko potegnemo neskončno ravn<strong>in</strong>, torej lahko dobimo tudi neskončno različnih<br />
napetosti. Vsa množica možnih napetosti σ <strong>in</strong> τ predstavlja napetostno stanje v točki P . Možno je<br />
dokazati, da se napetostno stanje v točki P glede na koord<strong>in</strong>atni sistem o;x,y,z da opisati z devetimi<br />
elementi, pri čemer ima šest elementov še lastnost, da sta dva <strong>in</strong> dva elementa enaka. Prostorsko<br />
stanje napetosti je tako določeno s šestimi elementi. Skup<strong>in</strong>a devetih elementov se imenuje napetostni<br />
tenzor, elementi pa tenzorske komponente.<br />
Izberimo ploskev ds, ki je vzporedna ravn<strong>in</strong>i z − y. Napetostim, ki delujejo na ploskev, pripišimo<br />
<strong>in</strong>dekse po pravilu, da prvi <strong>in</strong>deks označuje smer normale na ravn<strong>in</strong>o, drugi <strong>in</strong>deks pa označuje smer<br />
vzdolž katere napetost deluje. Torej σ(smer normale)(smer delovanja).<br />
Za primer na sliki označimo normalno napetost kot σxx oz. krajše σx, ker je x smer normale na<br />
ravn<strong>in</strong>o. Tangencialno napetost τx, ki leži v ravn<strong>in</strong>i s <strong>in</strong> ima dve komponenti, ki delujeta vzdolž z <strong>in</strong><br />
y osi koord<strong>in</strong>atnega sistema, označimo kot τxz <strong>in</strong> τxy.<br />
x<br />
σx<br />
z<br />
o<br />
ds<br />
P<br />
�p<br />
Slika 2.19: Napetostne komponente, ki delujejo na ravn<strong>in</strong>i z − y<br />
Podobno lahko skozi točko P položimo ravn<strong>in</strong>o, ki je vzporedna z ravn<strong>in</strong>o x − z <strong>in</strong> dobimo<br />
komponente napetosti σy,τyx <strong>in</strong> τyz. V primeru, da skozi točko P položimo ravn<strong>in</strong>o, ki je vzporedna<br />
z ravn<strong>in</strong>o x − y, pa dobimo napetosti σz,τzx <strong>in</strong> τzy. To je devet komponent napetostnega tenzorja, ki<br />
popolnoma opisuje napetostno stanje v točki P . Točko lahko obravnavamo kot <strong>in</strong>f<strong>in</strong>itizimalno kocko,<br />
katere dimenzija je zmanjšana z limitiranjem proti nič. Takšna točka ima šest ploskev na katerih<br />
delujejo sile vzdolž osi koord<strong>in</strong>atnega sistema.<br />
Na vsako ploskev delujejo tri komponente napetosti, skupaj torej osemnajst. Vsaka ploskev ima<br />
nasprotno ploskev, na kateri delujejo tudi tri komponente, ki pa so nasprotno usmerjene, da je ohranjeno<br />
ravnotežje. Ker je sistem v ravnotežju mora veljati vseh šest ravnotežnih pogojev; trije za sile<br />
<strong>in</strong> trije za momente. Če predpostavimo, da so dolž<strong>in</strong>e stranic kocke enake ∆x, ∆y <strong>in</strong> ∆z, lahko<br />
τxz<br />
y<br />
τxy<br />
τx
30 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
σy<br />
τ yz<br />
σx<br />
∆y<br />
τ yx<br />
τxz<br />
τxy<br />
τ zy<br />
σz<br />
τzx τzy<br />
z<br />
P<br />
τ xy<br />
x y τ xz<br />
τ zx<br />
σz<br />
Slika 2.20: Napetosti, ki delujejo v točki P , na ploskvah <strong>in</strong>f<strong>in</strong>itizimalne kocke<br />
zapišemo ravnotežno enačbo za momente okoli osi z:<br />
� Mzi = 0 : τxy(∆y∆z)0.5∆x+τ xy(∆y∆z)0.5∆x −τyx(∆x∆z)0.5∆y −τ yx(∆x∆z)0.5∆y = 0<br />
kar je enako<br />
iz česar sledi<br />
τyx<br />
∆x<br />
σx<br />
τyz<br />
σy<br />
∆z<br />
2 τxy(∆y∆z)0.5∆x − 2 τyx(∆x∆z)0.5∆y − y = 0<br />
τxy = τyx<br />
Podobno lahko izpeljemo tudi iz ostalih dveh momentnih enačb:<br />
� Mxi = 0 ⇒ τyz = τzy<br />
� Myi = 0 ⇒ τzx = τxz<br />
Na podlagi izpeljanega velja izrek, ki pravi, da sta dve tangencialni napetosti, ki se srečata na pravokotnem<br />
robu <strong>in</strong> imata torej obrnjen red <strong>in</strong>deksov, po velikosti vedno enaki.<br />
Napetostno stanje v točki P , ki je opisano z devetimi napetostmi, lahko zapišemo v matrični<br />
obliki. Matriko imenujemo napetostni tenzor:<br />
⎡<br />
⎤ ⎡ ⎤<br />
⎢<br />
⎣<br />
dfx<br />
dAx<br />
dfx<br />
dAy<br />
dfx<br />
dAz<br />
dff<br />
dAx<br />
dfy<br />
dAy<br />
dfy<br />
dAz<br />
dfz<br />
dAx<br />
dfz<br />
dAy<br />
dfz<br />
dAz<br />
⎥<br />
⎦ =<br />
⎣<br />
σx τxy τxz<br />
τyx σy τyz<br />
τzx τzy σz<br />
V matriki nastopajo natezne ali tlačne napetosti po diagonali, izven diagonale pa tangencialne oz.<br />
strižne. Glede na gornji izrek obstaja simetrija preko glavne diagonale, zato govorimo o simetričnem<br />
tenzorju, ki vsebuje šest neodvisnih spremenljivk.<br />
⎦
<strong>2.3</strong> TRDNOST IN ELASTIČNOST 31<br />
Pri ravn<strong>in</strong>skem stanju napetosti, ki nastopi, če se napetosti pojavijo v ravn<strong>in</strong>i, namesto kocke<br />
obravnavamo ploskev z dimenzijami ∆x∆y <strong>in</strong> <strong>in</strong>f<strong>in</strong>itizimalno debel<strong>in</strong>o δ. Ravnotežje za ravn<strong>in</strong>ski<br />
element je zagotovljeno z:<br />
� Fxi = 0<br />
� Fyi = 0<br />
� Mzi = 0<br />
Z izpeljavo ravnotežnih enačb po gornjem zgledu ugotovimo, da sta tangencialni napetosti, ki se<br />
srečujeta na pravokotnih robovih ploskve, enaki τxy = τyx. Normalni napetosti pa sta σx <strong>in</strong> σy. Tako<br />
napetostni tenzor za ravn<strong>in</strong>sko stanje vsebuje le štiri komponente, pri čemer sta diagonalni enaki:<br />
� σx τxz<br />
τyx σy<br />
Napetost je matematični pojem, ki je def<strong>in</strong>iran kot sila, ki deluje na orientirano površ<strong>in</strong>o v neki<br />
točki. Napetostno stanje v točki opisuje napetostni tenzor z ozirom na določen koord<strong>in</strong>atni sistem.<br />
Ker je lahko koord<strong>in</strong>atni sistem postavljen poljubno, je tudi napetostnih tenzorjev za isto točko v<br />
nosilcu več.<br />
V nekaterih primerih je izračun napetosti v enem koord<strong>in</strong>atnem sistemu bolj primeren kot npr. v<br />
drugem. Lep primer tega je pravokotna struktura, ki je zlepljena iz dveh kosov pod nekim kotom.<br />
Ker je lepilo odpornejše na tangencialne obremenitve v primerjavi z normalnimi, je zanimivo določiti<br />
kolikšen delež sil obremenitve rezultira v smeri tangencialno <strong>in</strong> normalno na rez.<br />
f<br />
f<br />
f<br />
P<br />
P<br />
τxy<br />
'<br />
P<br />
Slika 2.21: Napetosti v točki P izražene glede na različne koord<strong>in</strong>atne sisteme<br />
V problemih biomehanike se zaradi primernosti poleg Kartezijevega uporabljajo tudi drugi koord<strong>in</strong>atni<br />
sistemi. Tako je npr. pri analizi srčno-žilnega sistema zaradi cevaste oblike ožilja primerna<br />
τxy<br />
σx<br />
σ ′ x<br />
�<br />
y'<br />
y<br />
α<br />
f<br />
x'<br />
x
32 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
uporaba cil<strong>in</strong>dričnih koord<strong>in</strong>at. Podobno je pri analizi celičnih struktur ali npr. mehurja najprimernejša<br />
uporaba krogelnih koord<strong>in</strong>at. Ne glede na uporabljeni koord<strong>in</strong>atni sistem pa dogovorjena notacija<br />
za napetosti σ(smer normale)(smer delovanja) drži. V cil<strong>in</strong>dričnih koord<strong>in</strong>atah (r,θ,z) ima tenzor<br />
naslednjo obliko <strong>in</strong> pomen:<br />
⎡<br />
⎣<br />
σrr τrθ τrz<br />
τθr σθθ τθz<br />
τzr τzθ σzz<br />
⎤<br />
⎦ dr<br />
σzz<br />
σθθ<br />
τzθ<br />
τθz<br />
Slika 2.22: Napetosti izražene v cil<strong>in</strong>dričnem koord<strong>in</strong>atnem sistemu<br />
V krogelnih koord<strong>in</strong>atah (r,θ,φ) pa tenzor dobi naslednjo obliko:<br />
⎡<br />
⎣<br />
σrr τrθ τrφ<br />
τθr σθθ τθφ<br />
τφr τφθ σφφ<br />
⎤<br />
⎦<br />
σθθ<br />
σrr<br />
sff<br />
σrr<br />
sff<br />
σθθ<br />
dz<br />
τzθ<br />
τθz<br />
dθ<br />
σθθ<br />
σzz<br />
σθθ<br />
σrr<br />
τrθ<br />
τθr<br />
σθθ<br />
τθr<br />
P<br />
τrθ<br />
σrr
<strong>2.3</strong> TRDNOST IN ELASTIČNOST 33<br />
<strong>2.3</strong>.2 Transformacija napetosti med koord<strong>in</strong>atnimi sistemi<br />
Če želimo analizirati poljubno orientirano ravn<strong>in</strong>sko napetostno stanje v notranjosti nosilca, kot je to<br />
prikazano na sliki 2.21, okoli točke P izrežemo diferencialno prizmo, na kateri študiramo napetosti.<br />
Cilj je transformirati napetosti iz koord<strong>in</strong>atnega sistema x−z v koord<strong>in</strong>atni sistem x ′ −y ′ , ki je zavrten<br />
za kot α.<br />
dy<br />
σxx<br />
τxy<br />
α<br />
τyx<br />
dx<br />
ds<br />
τxy'<br />
σyy<br />
σxx'<br />
Sistem je v ravnotežju, zato lahko zapišemo ravnotežno enačbo za sile vzdolž smeri x ′ :<br />
� Fx ′ = 0 : σ′ xxδds − (σxxδdy) cosα − (τyxδdy) cos α−<br />
δ<br />
y'<br />
−(σyyδdx) s<strong>in</strong> α − (τxyδdy) s<strong>in</strong> α = 0<br />
Če uporabimo enakosti dx = ds s<strong>in</strong> α, dy = ds cos α <strong>in</strong> τxy = τyx ter izraz okrajšamo s površ<strong>in</strong>o δds,<br />
dobimo:<br />
σ ′ xx = σxx cos 2 α + σyy s<strong>in</strong> 2 α + 2τxy s<strong>in</strong> α cos α (2.27)<br />
Z upoštevanjem trigonometričnih izrazov<br />
cos 2 α =<br />
dobi enačba (2.80) obliko<br />
oz.<br />
1+cos 2α<br />
2 , s<strong>in</strong> 2 α =<br />
1−cos 2α<br />
2 , s<strong>in</strong> 2α = 2s<strong>in</strong>α cosα (2.28)<br />
σ ′ 1+cos 2α 1−cos 2α<br />
xx = σxx + σyy + τxy s<strong>in</strong> 2α<br />
2<br />
2<br />
σ ′ xx = σxx+σyy<br />
2<br />
+ σxx−σyy<br />
2<br />
cos 2α + τxy s<strong>in</strong> 2α<br />
y<br />
α<br />
x'<br />
x<br />
(2.29)
34 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
Podobno zapišemo ravnotežno enačbo za sile, ki delujejo vzdolž smeri y ′ :<br />
� Fy ′ = 0 : τ ′ xzδds + (σxxδdy) s<strong>in</strong> α − (τxyδdy) cos α−<br />
−(σyyδdx) cos α + (τyxδdy) s<strong>in</strong> α = 0<br />
Z uporabo gornjih že uporabljenih enakosti <strong>in</strong> trigonometričnih izrazov izpeljemo:<br />
τ ′ xy = 2 s<strong>in</strong> α cosα � � σyy−σxx 2 2 + (cos α − s<strong>in</strong> α)τxy<br />
2<br />
oz.<br />
τ ′ xy = σyy−σxx<br />
2<br />
s<strong>in</strong> 2α + τxy cos 2α<br />
(<strong>2.3</strong>0)<br />
Enačbi (2.29) <strong>in</strong> (<strong>2.3</strong>0) predstavljata orodje za določitev napetosti v poljubnem Kartezijevem koord<strong>in</strong>atnem<br />
sistemu, ki je za kot α zavrten glede na prvotni koord<strong>in</strong>atni sistem <strong>in</strong> ima z njim skupno<br />
izhodišče. Tako je ravnotežje sil potrebno določiti le enkrat v koord<strong>in</strong>atnem sistemu, ki je za to<br />
najprimernejši. Podobne transformacijske enačbe veljajo tudi za tridimenzionalni problem.<br />
<strong>2.3</strong>.3 Glavne napetosti <strong>in</strong> maksimalen strig<br />
Ker je v isti točki nosilnega elementa možno določiti različne napetosti z ozirom na izbiro koord<strong>in</strong>atnega<br />
sistema, torej glede na kot α, nas zanima ali je možno poiskati tak koord<strong>in</strong>atni sistem v katerem<br />
bodo nastopale maksimalne oz. m<strong>in</strong>imalne normalne <strong>in</strong> tangencialne napetosti. Izračun ekstrema<br />
zahteva določitev prvega odvoda glede na kot α, ki ga izenačimo z nič:<br />
oz.<br />
dσ ′ xx<br />
dα = σxx − σyy<br />
2(−s<strong>in</strong>2α) + τxy2(cos2α) = 0 (<strong>2.3</strong>1)<br />
2<br />
s<strong>in</strong> 2α<br />
cos 2α =<br />
τxy<br />
σxx − σyy/2<br />
= tan 2α (<strong>2.3</strong>2)<br />
Kar pomeni, da maximalna ali m<strong>in</strong>imalna normalna napetost σ ′ xx nastopi pri kotu α, ki mu pripišemo<br />
<strong>in</strong>deks p:<br />
αp = 1<br />
2 tan−1<br />
� �<br />
2τxy<br />
σxx − σyy<br />
(<strong>2.3</strong>3)<br />
Ekstremne napetosti imenujemo glavne napetosti, <strong>in</strong>deks p pa izhaja iz angleške besede pr<strong>in</strong>cipal.<br />
Iz gornje enačbe sledi, da kadarkoli je tangencialna napetost τxy = 0, je kot αp = 0, kar pomeni, da<br />
sta napetosti σxx <strong>in</strong> σyy maksimalni ali m<strong>in</strong>imalni vrednosti. Nadalje, če sta normalni napetosti enaki<br />
(σxx = σyy), iz enačbe sledi, da je tan 2αp = ∞. V tem primeru je 2αp = π/2 oz. αp = π/4, saj gre<br />
funkcija tangens v neskončnost pri vrednosti π/2. Za vse ostale vrednosti napetosti kot αp določimo<br />
iz enačbe(<strong>2.3</strong>4). Funkcija tangens ima periodo π, zato velja<br />
tan(2α ± kπ) = tan(2(α ± kπ 2τxy<br />
)) =<br />
2 σxx − σyy<br />
k = 0, 1, 2,... (<strong>2.3</strong>4)
<strong>2.3</strong> TRDNOST IN ELASTIČNOST 35<br />
Za nas sta pomembni prvi dve rešitvi, <strong>in</strong> sicer, pri k = 0 dobimo kot α1 ter pri k = 1 kot α2 =<br />
α1 ± π/2. Če vstavimo vrednosti kotov α1 <strong>in</strong> α2 v enačbi za izračun napetosti σ ′ xx <strong>in</strong> τ ′ xx ((2.29) <strong>in</strong><br />
(<strong>2.3</strong>0)) , dobimo glavni napetosti σ1 = σ ′ xx|max/m<strong>in</strong> <strong>in</strong> σ2 = σ ′ yy|max/m<strong>in</strong> ter pripadajoči tangencialni<br />
napetosti τxy = τyx.<br />
Ker je tangens kota v trikotniku enak razmerju nasprotiležne <strong>in</strong> priležne stranice, lahko enačbo<br />
(<strong>2.3</strong>3) trigonometrijsko <strong>in</strong>terpretiramo kot je to prikazano na spodnji sliki.<br />
Iz slike sledi<br />
kjer je hipotenuza trikotnika enaka<br />
Podobno zapišemo še<br />
2α<br />
h<br />
σxx−σyy<br />
2<br />
τxy<br />
Slika 2.23: Trigonometrijska <strong>in</strong>terpretacija enačbe (<strong>2.3</strong>4)<br />
h =<br />
s<strong>in</strong> 2αp = τxy<br />
h<br />
�<br />
�σxx<br />
�2 − σyy<br />
2<br />
+ τ 2 xy<br />
cos 2αp = (σxx − σyy)/2<br />
h<br />
Če uporabimo gornji relaciji za s<strong>in</strong> 2αp <strong>in</strong> cos 2αp v enačbi (2.29) dobimo:<br />
σ ′ xx|m<strong>in</strong>/max = σ ′ xx(α = αp) = σxx + σyy<br />
2<br />
+ σxx − σyy<br />
2<br />
x<br />
� �<br />
(σxx − σyy)/2<br />
h<br />
+ τxy<br />
� �<br />
τxy<br />
h<br />
(<strong>2.3</strong>5)<br />
(<strong>2.3</strong>6)<br />
(<strong>2.3</strong>7)<br />
(<strong>2.3</strong>8)<br />
V gornjem izrazu lahko drugi <strong>in</strong> tretji člen združimo na skupni imenovalec ter ulomek pomnožimo z<br />
ena, to je s kvocientom h<br />
h :<br />
σ ′ xx|m<strong>in</strong>/max = σxx + σyy<br />
2<br />
�<br />
((σxx − σyy)/2)<br />
+<br />
2�<br />
h<br />
+ τ 2 h<br />
xy<br />
h<br />
(<strong>2.3</strong>9)
36 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
iz česar izpeljemo enačbo za dve glavni napetosti<br />
σ1,2 = σ ′ xx,yy|m<strong>in</strong>/max = σxx + σyy<br />
2<br />
±<br />
�<br />
�σxx<br />
�2 − σyy<br />
2<br />
+ τ 2 xy<br />
(2.40)<br />
Tangencialno napetost pri kotu α = αp dobimo tako, da vstavimo αp v enačbo (<strong>2.3</strong>0):<br />
τ ′ � � �τxy<br />
σyy −<br />
� � �<br />
σxx<br />
(σxx − σyy)/2<br />
xy(α = αp) =<br />
+ τxy<br />
= 0 (2.41)<br />
2 h<br />
h<br />
iz česar sledi, da je strižna napetost pri m<strong>in</strong>imalni ali maksimalni vrednosti normalne napetosti vedno<br />
enaka nič. Z drugimi besedami, v primeru glavnih napetosti delujejo samo natezne ali tlačne napetosti<br />
vzdolž glavnih osi, brez striga.<br />
V primeru, da nas zanima vprašanje, podobno kot za normalne napetosti, pri katerem kotu α<br />
doseže tangencialna napetost maksimalno ali m<strong>in</strong>imalno vrednost, moramo odvajati izraz (<strong>2.3</strong>0) glede<br />
na kot α <strong>in</strong> ga izenačiti z nič:<br />
ali<br />
dτ ′ xy<br />
dα = σyy − σxx<br />
2<br />
(cos 2α)2 + τxy(− s<strong>in</strong> 2α)2 = 0 (2.42)<br />
s<strong>in</strong> 2α<br />
cos 2α = (σyy − σxx)/2<br />
τxy<br />
= tan 2α (2.43)<br />
Če označimo kot α pri katerem strig doseže maksimum ali m<strong>in</strong>imum z <strong>in</strong>deksom s, dobimo:<br />
2αs = tan −1<br />
� �<br />
σyy − σxx<br />
2τxy<br />
(2.44)<br />
Iz enačbe je razvidno, da kadar sta normalni napetosti σyy <strong>in</strong> σxx enaki, je kot αs = 0, napetost τ ′ xy<br />
pa doseže ekstrem. Kadar je τxy enak nič, velja 2αs = π/2 oz. αs = π/4. Če se spomnimo, da je<br />
strig enak nič v stanju glavnih napetosti, spoznamo, da sta kota αs <strong>in</strong> αp medsebojno zamaknjena za<br />
π/4 oz. 45o . Z vpeljavo izraza za αs v enačbo (<strong>2.3</strong>0) <strong>in</strong> uporabo trigonometričnih relacij s slike 2.23,<br />
dobimo<br />
kar lahko drugače zapišemo kot<br />
τ ′ xy|m<strong>in</strong>/max = τ ′ xy(α = αs) = σyy − σxx<br />
2<br />
τ ′ xy|m<strong>in</strong>/max = ±<br />
� �σyy − σxx<br />
2<br />
� �<br />
σyy − σxx<br />
� 2<br />
2h<br />
+ τ 2 xy<br />
τxy<br />
+ τxy<br />
h<br />
Gornji izraz je zaradi kvadriranja lahko enak izrazu (<strong>2.3</strong>6) za hipotenuzo trikotnika h<br />
τm = τ ′ �<br />
�σxx<br />
�2 − σyy<br />
xy|m<strong>in</strong>/max = ±<br />
+ τ<br />
2<br />
2 xy<br />
(2.45)<br />
(2.46)<br />
(2.47)
<strong>2.3</strong> TRDNOST IN ELASTIČNOST 37<br />
Tukaj sta važni dve stvari. Prvič, pri kotu α = αs normalne napetosti niso nič (kot je to primer za<br />
strig pri α = αp). Drugič, v primeru glavnih napetosti pri α = 0 sta glavni napetosti kar σxx <strong>in</strong><br />
σyy, medtem ko je τxy = 0. V tem primeru je ekstremna vrednost striga τm = τ ′ xy|m<strong>in</strong>/max preprosto<br />
polovica razlike med glavnima napetostima:<br />
τm = τ ′ xy|m<strong>in</strong>/max = ± σ1 − σ2<br />
2<br />
(2.48)<br />
Na koncu povzamimo postopek za določitev maksimalnih napetosti v notranjosti nosilnega elementa:<br />
• najprej iz ravnotežnih enačb določimo napetosti σxx,σyy <strong>in</strong> τxy,<br />
• s tranformacijskimi enačbami izračunamo σ ′ xx,σ ′ yy <strong>in</strong> τ ′ xy za katerikoli kot α,<br />
• ekstrem za normalne napetosti določimo z operacijo dσ′ xx<br />
dα<br />
= 0, kar da za razultat kot αp,<br />
• s pomočjo trigonometrije poiščemo maksimalne napetosti σ ′ xx(αp) = σ ′ xx|m<strong>in</strong>/max,τ ′ xy = 0,σ ′ yy(αp) =<br />
σ ′ yy|m<strong>in</strong>/max,<br />
• ekstrem za tangencialne napetosti pa določimo z operacijo dτ ′ xz<br />
dα<br />
= 0, kar da za rezultat kot αs,<br />
• s pomočjo trigonometrije poiščemo maksimalno tangencialno napetost τ ′ xy(αs) = τ ′ xy|m<strong>in</strong>/max,<br />
pri čemer pa normalni napetosti σ ′ xx(αs) <strong>in</strong> σ ′ yy(αs) nista nič.
38 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
2.4 Deformacije<br />
To poglavje obravnava realne lastnosti materialov, ki se praktično vsi, pod vplivom zunanjih obremenitev<br />
na nateg, tlak ali strig, deformirajo. Deformacije - spremembe oblike - povzročata normalna <strong>in</strong><br />
tangencialna napetost σ <strong>in</strong> τ. Poznamo dve vrsti deformacij, <strong>in</strong> sicer:<br />
• elastične <strong>in</strong><br />
• plastične deformacije.<br />
V primeru plastičnih deformacij se material, po prenehanju obremenitve, povrne nazaj v izhodiščno<br />
stanje. V tem primeru gre za reverzibilen pojav. Material se v osnovno stanje vrača preko istih<br />
točk kot pri raztegovanju - torej ne nastopa histereza. V primer plastičnih deformacije se material<br />
ne povrne v začetno obliko, kot jo je imel pred obrementivijo. V naravi navadno ne najdemo čisto<br />
elastičnih ali čisto plastičnih materialov; običajno se pojavlja komb<strong>in</strong>acija obojih.<br />
2.4.1 Deformacija pri nategu<br />
Natezne sile povzročajo normalne natezne napetosti σ, zaradi katerih pride do deformacije.<br />
l<br />
l0<br />
S<br />
S0<br />
Slika 2.24: Deformacije pri nategu<br />
F<br />
Za nateg velja:<br />
l0 → l ; l > l0<br />
S0 → S ; S < S0<br />
Rezultirajoči raztezek:<br />
∆l = l − l0 ; ∆l > 0<br />
Rezultirajoča kontrakcija:<br />
∆S = S − S0 ; ∆S < 0<br />
Pri nategu nastopa specifični raztezek ǫ, ki je def<strong>in</strong>iran kot relativna sprememba dolž<strong>in</strong>e. ǫ je torej<br />
raztezek dolž<strong>in</strong>e normiran na prvotno dolž<strong>in</strong>o <strong>in</strong> je zato brezdimenzijsko število.<br />
ǫ = ∆l<br />
l0<br />
= l − l0<br />
Če je ǫ znan, lahko iz njega izračunamo prvotno dolž<strong>in</strong>o l:<br />
l0<br />
(2.49)<br />
l = l0(1 + ǫ) (2.50)
2.4 DEFORMACIJE 39<br />
Specifična kontrakcija prereza ψ je kontrakcija prereza normirana na prvotni prerez. Je brezdimenzijsko<br />
število <strong>in</strong> vedno nastopa kot pozitivno število (ψ > 0). Zato jo pri nategu zapišemo z negativnim<br />
predznakom.<br />
−ψ = ∆S<br />
= S − S0<br />
(2.51)<br />
Če je ψ znan, lahko izračunamo presek S:<br />
2.4.2 Tlačna deformacija<br />
S0<br />
S0<br />
S = S0(1 − ψ) (2.52)<br />
Tlačne deformacije nastopijo pri delovanju tlačnih sil. Kadar npr. valj iz Alum<strong>in</strong>ija obremenimo na<br />
tlak s silo F , se zaradi tega ta sesede <strong>in</strong> odebeli.<br />
l<br />
l0<br />
Slika 2.25: Deformacije pri tlačnem delovanju<br />
S<br />
S0<br />
F<br />
Pri tlačnem delovanju velja:<br />
l0 → l ; l < l0<br />
S0 → S ; S > S0<br />
Rezultirajoči skrček:<br />
∆l = l − l0 ; ∆l < 0<br />
Rezultirajoča ekspanzija:<br />
∆S = S − S0 ; ∆S > 0<br />
Pri tlaku dobimo specifični skrček ǫ, ki je, tako kot zgoraj, def<strong>in</strong>iran kot relativna sprememba<br />
dolž<strong>in</strong>e. ǫ naj bo vedno pozitivno število (ǫ > 0), zato ga zapišem z negativnim predznakom.<br />
−ǫ = ∆l<br />
l0<br />
= l − l0<br />
Če je ǫ znan, lahko iz njega izračunamo prvotno dolž<strong>in</strong>o l:<br />
l0<br />
(2.53)<br />
l = l0(1 − ǫ) (2.54)
40 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
Specifična ekspanzija prereza ψ je kontrakcija prereza normirana na prvotni prerez. Je brezdimenzijsko<br />
<strong>in</strong> pozitivno število (ψ > 0).<br />
ψ = ∆S<br />
= S − S0<br />
(2.55)<br />
Če je ψ znan, lahko izračunamo prvotni prerez S:<br />
2.4.3 Poissonov koeficient <strong>in</strong> število<br />
S0<br />
S0<br />
S = S0(1 + ψ) (2.56)<br />
Poissonov koeficient <strong>in</strong> število opisujeta razmerje med osnimi <strong>in</strong> prečnimi deformacijami. Če obremenimo<br />
elastični kvader z natezno silo vzdolž longitud<strong>in</strong>alne osi, se ta podaljša <strong>in</strong> skrči.<br />
Specifični raztezek je def<strong>in</strong>iran kot:<br />
F F<br />
c0<br />
c<br />
Slika 2.26: Osne <strong>in</strong> prečne deformacije pri nategu<br />
c = c0 + ∆c ⇒ c = c0(1 + ∆c<br />
c0 )<br />
a = a0 − ∆a ⇒ a = a0(1 − ∆a<br />
a0 )<br />
b = b0 − ∆b ⇒ b = b0(1 − ∆b<br />
b0 )<br />
ǫ = ∆c<br />
c0<br />
a<br />
a0<br />
b<br />
b0<br />
(2.57)<br />
Predpostavimo homogen <strong>in</strong> izotropen material, kar pomeni, da so lastnostni v vseh smereh enake. V<br />
tem primeru je prečni specifični skrček, ki mu pripišemo <strong>in</strong>dex p, enak:<br />
Z upoštevanjem gornjih relacij zapišemo:<br />
−ǫp = ∆a<br />
a0<br />
= ∆b<br />
b0<br />
c = c0(1 + ǫ)<br />
a = a0(1 − ǫp)<br />
b = b0(1 − ǫp)<br />
(2.58)
2.4 DEFORMACIJE 41<br />
Ob predpostavki homogenega <strong>in</strong> izotropnega materiala, je razmerje med specifičnim raztezkom <strong>in</strong><br />
prečnim specifičnim skrčkom ǫ <strong>in</strong> ǫp konstanta, neglede na velikost sile <strong>in</strong> ostalih parametrov.<br />
Poissonov koeficient µ je def<strong>in</strong>iran kot razmerje:<br />
ǫ<br />
ǫp<br />
µ = ǫp<br />
ǫ<br />
= konstanta (2.59)<br />
µ 1 (2.61)<br />
Poglejmo si, kako je specifična kontrakcija ψ odvisna od prečnega specifičnega skrčka ǫp (ψ =<br />
f(ǫp)):<br />
−ψ = S−S0<br />
S0<br />
= ab−a0b0<br />
a0b0<br />
= a0(1−ǫp)b0(1−ǫp)−a0b0<br />
a0b0<br />
= 1 − 2ǫp + ǫ 2 p − 1 (2.62)<br />
Ker je ǫp majhen, je njegov kvadrat ǫ 2 p še manjši (ǫp >> ǫ 2 p). Zato izraz poenostavimo:<br />
−ψ = −2 ǫp<br />
ψ = 2 ǫp = 2 ǫ µ =<br />
2 ǫ<br />
m<br />
(2.63)<br />
Če kvader v vzdolžni smeri c obremenimo na tlak, dobimo enak rezultat, z razliko, da takrat velja:<br />
2.4.4 Volumska deformacija<br />
S = S0(1 + ψ) namesto S = S0(1 − ψ) kot pri nategu. (2.64)<br />
Volumska deformacija je def<strong>in</strong>irana kot deformacija prostorn<strong>in</strong>e pri enoosni obremenitvi kvadra:<br />
c<br />
c0<br />
F F<br />
Slika 2.27: Volumska deformacija<br />
a<br />
a0<br />
b<br />
b0<br />
Volumska deformacija:<br />
∆V = V − V0
42 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
Specifična volumska deformacija e je pri tem def<strong>in</strong>irana kot:<br />
e = ∆V<br />
V0<br />
= V − V0<br />
V0<br />
(2.65)<br />
kjer je V0 = a0 b0 c0 volumen pred obremenitvijo <strong>in</strong> V = a b c volumen pri obremenitvi. Velja<br />
enakost:<br />
V = a b c = a0(1 − ǫp) b0(1 − ǫp) c0(1 + ǫ) (2.66)<br />
V tem primeru lahko e izrazimo kot:<br />
e = a0 b0 c0(1 − ǫp) 2 (1 + ǫp) − a0 b0 c0<br />
= (1 − ǫp)<br />
a0 b0 c0<br />
2 (1 + ǫp) − 1 =<br />
= 1 − 2 ǫp + ǫ 2 p + ǫ − 2 ǫ ǫp + ǫ 2 p ǫ − 1 (2.67)<br />
Zaradi majhnosti zanemarimo kdvadratne člene ǫ 2 p <strong>in</strong> ǫǫp:<br />
e . = ǫ − 2 ǫp = ǫ − 2ǫ<br />
m<br />
(2.68)<br />
kar nas privede do izraza za specifično volumsko deformacijo, kjer je ta izražena s poissonovim<br />
številom m <strong>in</strong> specifičnim raztezkom ǫ:<br />
Iz enačbe (2.69) je razvidno da:<br />
e = ∆V<br />
V<br />
m − 2<br />
= ǫ (2.69)<br />
m<br />
• če je m = 2, bo volumski raztezek enak nič (v naravi takšnega materiala ni)<br />
• če je m > 2, se bo volumen pod vplivom enoosne obremenitve povečal<br />
• če je m < 2, se bo volumen pod vplivom enoosne obremenitve zmanjšal<br />
V področju elastičnosti veljajo lastnosti l<strong>in</strong>earnosti <strong>in</strong> superpozicije.<br />
2.4.5 Deformacija pri tangencialnih napetostih<br />
Tangencialne napetosti τ, ki so posledica strižnih <strong>in</strong> torzijskih sil, povzročajo deformacije. Tangencialna<br />
napetost, ki deluje na kvader, ki je pritrjen na podlago, povzroči, da se kvader deformira v<br />
paralelogramsko obliko.<br />
Kot γ je mera deformacije, ki nastane zaradi tangencialnih napetosti. Zato ga imenujemo specifična<br />
tangencialna deformacija.
2.4 DEFORMACIJE 43<br />
y<br />
x<br />
A<br />
C<br />
γ<br />
A ′<br />
B<br />
γ<br />
D<br />
Slika 2.28: Tangencialna deformacija<br />
2.4.6 Deformacijski tenzor<br />
B ′<br />
Ker gre običajno za majhne<br />
kote, lahko deformacijski kot<br />
γ izrazimo kot:<br />
tanγ = ∆x<br />
y<br />
AA ¯<br />
= ′ BB ¯<br />
AC ¯<br />
= ′<br />
BD ¯<br />
Za majhne kote velja:<br />
tanγ . = γ<br />
V realnosti idealnih obremenitev ni, saj vedno nastopa komb<strong>in</strong>acija normalnih <strong>in</strong> tangencialnih napetosti.<br />
Komb<strong>in</strong>irano deformacijo opišemo z deformacijskim tenzorjem. Obravnavajmo diferencialno<br />
majhno volumsko telo, posebej za normalne <strong>in</strong> posebej za tangencialne napetosti.<br />
2.4.6.1 Normalne napetosti <strong>in</strong> deformacije<br />
Telo, ki je obremenjeno po vseh treh smereh, se tudi deformira v vseh treh smereh. Slika predstavlja<br />
<strong>in</strong>fitizimalno majhno kocko narisano v ravn<strong>in</strong>i x − y.<br />
duy<br />
2<br />
σx<br />
dx<br />
y<br />
σy<br />
σy<br />
dy<br />
dux<br />
2<br />
σx<br />
x<br />
dy + duy<br />
Slika 2.29: Deformacije pri normalnih napetostih<br />
Na telo delujejo natezne napetosti:<br />
σ1 = σx<br />
σ2 = σy<br />
σ3 = σz<br />
ki povzročijo pomike:<br />
dux = ǫxdx<br />
duy = ǫydy<br />
duz = ǫzdz<br />
Specifične deformacije so zaradi medsebojnega delovanja različnih sil izražene s parcialnimi od-
44 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
vodi:<br />
2.4.6.2 Tangencialne napetosti <strong>in</strong> deformacije<br />
ǫx = ∂ux<br />
∂x ; ǫy = ∂uy<br />
∂y ; ǫz = ∂uz<br />
∂z<br />
(2.70)<br />
V poglavju o ravn<strong>in</strong>skih napetostih smo def<strong>in</strong>irali enačbo τ = f(ϕ), po kateri se pojavi maksimalna<br />
tangencialna napetost ob prisotnosti glavnih napetosti σ1 = σx <strong>in</strong> σ2 = σy v dveh ravn<strong>in</strong>ah pod kotom<br />
ϕ = ±45 o . V primeru, ko je σ1 natezna, σ2 pa tlačna napetost, po velikosti pa sta si enaki |σ1| = |σ2|,<br />
velja:<br />
±τmax = σ1 = σ2<br />
Situacijo lahko ponazorimo z Mohrovim krogom<br />
napetosti:<br />
Koord<strong>in</strong>atno ploskev ds = dx ·dy postavimo v kord<strong>in</strong>atni sistem <strong>in</strong> obremenimo s tangencialnimi<br />
napetostmi τij (<strong>in</strong>deks i predstavlja ploskev na katero napetost deluje, <strong>in</strong>deks j pa smer delovanja).<br />
Zaradi tangencialnih napetosti se pravokotna ploskev deformira v paralelogram, kvadratna pa v romb,<br />
kakor to prikazuje slika <strong>2.3</strong>0.<br />
Specifične tangencialne deformacije označimo z enakimi <strong>in</strong>deksi kot napetosti:<br />
.<br />
tanǫxy = ǫxy = ∂ux<br />
∂y<br />
.<br />
tanǫyx = ǫyx = ∂uy<br />
∂x<br />
Pri tem velja enakost ǫij = ǫji.<br />
Seštevek obeh specifičnih deformacij nam da deformacijski kot γ:<br />
γxy = ǫxy + ǫyx = 2 ǫyx<br />
σ2<br />
τ<br />
τmax<br />
−τmax<br />
Če ta postopek razširimo še na preostali dve ravn<strong>in</strong>i (z-y <strong>in</strong> y-x), dobimo sitem enačb:<br />
ǫxy = ǫyx → γxy = 2 ǫxy<br />
ǫyz = ǫzy → γyz = 2 ǫyz<br />
ǫxz = ǫzx → γxz = 2 ǫxz<br />
σ1<br />
45 o<br />
σ<br />
(2.71)
2.4 DEFORMACIJE 45<br />
−τxy<br />
σ1<br />
ǫxy<br />
dux<br />
σ2<br />
ǫyx<br />
τyx<br />
dx<br />
45 o<br />
45 o<br />
σ2<br />
−τyx<br />
Slika <strong>2.3</strong>0: Deformacija ploskve dxdy zaradi delovanja tangencialnih napetosti<br />
2.4.6.3 Komb<strong>in</strong>acija tangencialnih <strong>in</strong> normalnih napetosti ter deformacija<br />
Kadar pride do komb<strong>in</strong>irane deformacije (ǫ <strong>in</strong> γ) zaradi komb<strong>in</strong>iranega delovanja tangencialnih <strong>in</strong><br />
normalnih napetosti, vpeljemo deformacijski tenzor:<br />
� �<br />
� ǫx ǫxy ǫxz�<br />
� �<br />
�ǫyx<br />
ǫy ǫyz�<br />
� �<br />
(2.72)<br />
� �<br />
ǫzx ǫzy ǫz<br />
Deformacijski tenzor opisuje povezavo med napetostmi <strong>in</strong> deformacijami v vseh smereh. Tenzor<br />
vsebuje devet elementov, a ker velja enakost ǫij = ǫji, jih v bistvu vsebuje le šest.<br />
τxy<br />
σ1<br />
duy<br />
dy
46 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
2.4.7 Podajanje <strong>in</strong> merjenje deformacij <strong>in</strong> napetosti<br />
Za realna telesa velja, da so specifične deformacije rezultat delovanja tangencialnih <strong>in</strong> normalnih<br />
napetosti.<br />
ǫ = f(σ,τ)<br />
γ = f(σ,τ)<br />
V posebnih kalibriranih primerih se da doseči, da posamezne odvisnosti izločimo <strong>in</strong> so tako deformacije<br />
odvisne le od ene vrste obremenitve, ki pa jih določimo s pomočjo meritev:<br />
ǫ = f(σ)<br />
γ = f(τ)<br />
Za merjenje specifičnih deformacij materiala v odvisnosti od napetosti uporabljamo normalizirano<br />
poskusno palico okroglega premera dolž<strong>in</strong>e 220 mm <strong>in</strong> premera 20 mm. Med eksperimentom je<br />
F<br />
35 20<br />
25 70 220 70 25<br />
Slika <strong>2.3</strong>1: Normalizirana preizkusna palica<br />
preizkusna palica vpeta v preizkusni stroj, ki palico obremeni z znano silo. S pomočjo preciznih<br />
merilnikov za merjenje raztezkov (optični - ločjivost do 1/1000 mm, laserski - ločljivost do 1/10000<br />
mm) so izmerjene spremembe dolž<strong>in</strong>e palice. Meritve opravimo v več točkah. Na ta nač<strong>in</strong> dobimo<br />
funkcijsko odvisnost ∆l = f(F), iz katere pa lahko izračunamo funkcijsko odvisnost ǫ = f(σ), saj<br />
sta specifični raztezek <strong>in</strong> normalna napetost def<strong>in</strong>irana kot:<br />
ǫ = ∆l<br />
l0<br />
d<br />
S0<br />
σ = F<br />
S0<br />
F<br />
(2.73)<br />
Izmerjene karakteristike so za vsak material drugačne, razlagamo pa jih lahko na dva nač<strong>in</strong>a:<br />
s pomočjo fizikalne ali s pomočjo tehnične razlage. Pri tehnični razlagi sta specifični raztezek <strong>in</strong><br />
normalna napetost v določeni točki def<strong>in</strong>irana glede na začetni vrednosti S0 <strong>in</strong> l0:<br />
ǫi = li − l0<br />
l0<br />
σ = Fi<br />
S0<br />
(2.74)<br />
medtem ko sta pri fizikalni razlagi specifični raztezek <strong>in</strong> normalna napetost v določeni točki def<strong>in</strong>irana<br />
glede na prejšnjo točko:<br />
ǫi = li − li−1<br />
σ =<br />
li−1<br />
Fi<br />
(2.75)<br />
Si<br />
Razlike med obema razlagama so majhne za obremenitve v elastičnem področju. Do znatnih razlik<br />
pa prihaja pri obremenitvah v plastičnem področju, kjer je fizikalna razlaga natančnejša.
2.4 DEFORMACIJE 47<br />
2.4.7.1 σ − ǫ diagram<br />
Slika <strong>2.3</strong>4 predstavlja tipičen σ − ǫ diagram za enoosno obremenitev materiala. Zanimivi sta dve<br />
področji diagrama:<br />
−σP<br />
σP<br />
0<br />
σ<br />
P<br />
območje elastičnosti<br />
območje tečenja območje vlečenja<br />
S<br />
B<br />
σS σB = k ′<br />
Slika <strong>2.3</strong>2: σ − ǫ diagram<br />
• Področje 0-P je področje elastičnosti, v katerem se po prenehanju delovanja napetosti σ material<br />
povrne v prvotno stanje po isti premici. V tem področju so raztezki ǫ proporcionalni natezni<br />
napetosti σ, proces obremenjevanja <strong>in</strong> razbremenjevanja pa je reverzibilen.<br />
• Področje P-Z je področje plastičnega obnašanja materiala, kjer deformacije niso več proporcionalne<br />
napetostim <strong>in</strong> deformacijsko stanje ni več reverzibilno. To pomeni, da se material<br />
pri obremenjevanju <strong>in</strong> razbremenjevanju obnaša različno po različnih krivuljah. Deformacija<br />
ostane za stalno. V plastičnem področju najprej nastopi stanje tečenja, kjer diagram zaniha,<br />
nato pa stanje vlečenja, kjer pri majhnih obremenitvah nastopijo velike deformacije.<br />
Z<br />
σZ<br />
ǫ
48 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
Značilne točke σ − ǫ diagrama:<br />
P - meja elastičnosti, do koder je obnašanje elastično <strong>in</strong> l<strong>in</strong>earno<br />
S - navidezna meja elastičnosti, do koder je obnašanje nel<strong>in</strong>earno, a še vedno elastično<br />
B - natezna trdnost materiala σB - je najvišja napetost, ki jo izmerimo pri materialu, označimo jo tudi<br />
s k ′ .<br />
Z - porušna napetost σZ - najvišja napetost, ki jo material prenese<br />
Podobno kot natezno obremenitev obravnavamo tudi obremenitve na tlak. V tlačnem delu diagrama<br />
preučujemo funkcijsko odvisnost −σ = f(−ǫ). Za nekatere materiale je v elastičnem področju<br />
diagram simetričen. Pri izbiri materiala, pri projektiranju na obremenitve, je važno da obremenitve<br />
ne presežejo meje elastičnosti, torej da ne pride do trajnih deformacij.<br />
V področju 0-P, v področju elastičnosti, velja proporcionalnost. Koncept l<strong>in</strong>earne elastičnosti je<br />
prvi uvedel Robert Hook leta 1678 z def<strong>in</strong>icijo zakona s prevedenim naslovom “razteg je proporcionalen<br />
sili” (lat. ut tensio sic vis). Hookov zakon pravi, da je razmerje med napetostjo <strong>in</strong> deformacijo<br />
konstantno.<br />
E = σ<br />
ǫ<br />
� N<br />
m 2<br />
�<br />
(2.76)<br />
Konstanto E, ki opisuje proporcionalen odnos med napetostjo <strong>in</strong> deformacijo, imenujemo modul elastičnosti<br />
ali tudi Youngov modul, ki ima zaradi brezdimenzijskosti specifične deformacije enako<br />
dimenzijo kot napetost. Deformacijo v elastičnem področju izračunamo s pomočjo modula elastičnosti<br />
kot:<br />
ǫ = ∆l σ F<br />
F l0<br />
= = → ∆l = (2.77)<br />
l E SE E S<br />
Modul elastičnosti E je pravzaprav tista napetost pri kateri se dolž<strong>in</strong>a materiala podvoji (če je ∆l = l0,<br />
je ǫ = 1 <strong>in</strong> E = σ/1).<br />
2.4.7.2 τ − γ diagram<br />
Tangencialne deformacije, ki so posledica delovanja tangencialne napetosti τ ponazorimo s τ − γ<br />
diagramom. Številsko odvisnost pridobimo z meritvami v določenem številu točk, ki jih vnesemo v<br />
diagram. Na sliki <strong>2.3</strong>3 je prikazana tipična oblika diagrama.<br />
V l<strong>in</strong>earnem področju diagrama velja, da so specifične tangencialne deformacije γ l<strong>in</strong>earno odvisne<br />
od tangencialne napetosti τ. Proporcionalnost tudi v tem primeru izrazimo s pomočjo Hookovega<br />
zakona:<br />
G = ∆τ<br />
∆γ<br />
� N<br />
m 2<br />
�<br />
(2.78)<br />
Elastično konstanto G imenujemo strižni modul elastičnosti. Modul ima dimenzijo napetosti <strong>in</strong><br />
predstavlja tisto tangencialno napetost, ki povzroči specifično tangencialno deformacijo γ = 1. Takšna<br />
deformacija nastopi pri zasuku 1rad.
2.4 DEFORMACIJE 49<br />
2.4.7.3 Določitev modulov elastičnosti E <strong>in</strong> G<br />
τ2<br />
τ1<br />
τ<br />
γ1<br />
γ2<br />
Slika <strong>2.3</strong>3: τ − γ diagram<br />
Modul elastičnosti E, ki velja za nateg ali tlak, določimo iz σ − ǫ diagrama. V l<strong>in</strong>earnem področju<br />
diagrama izberemo dve točki <strong>in</strong> odčitamo vrednosti napetosti ter deformacije. Modul E je tangens<br />
naklonskega kota α premice l<strong>in</strong>earnega področja.<br />
M1(ǫ1,σ1); M3(ǫ3,σ3)<br />
E = σ<br />
ǫ<br />
= tanα<br />
E = σ3 − σ1<br />
ǫ3 − ǫ1<br />
σ3<br />
σ2<br />
σ1<br />
0<br />
σ<br />
M1<br />
α<br />
ǫ1 ǫ2 ǫ3<br />
M3<br />
γ<br />
Slika <strong>2.3</strong>4: σ − ǫ diagram<br />
Strižni modul G velja za strig <strong>in</strong> torzijo. Načeloma ga lahko določimo podobno kot modul E, iz<br />
diagrama τ − γ. V tem primeru velja:<br />
G = τ<br />
γ = τ3 − τ1<br />
γ3 − γ1<br />
Meritev je v tem primeru manj točna, ker je kot težje izmeriti z veliko natančnostjo v primerjavi<br />
z razdaljo. Zato je v uporabi metoda, ki modul elastičnosti G za dani material določi preko preko<br />
znanega Poissonovega števila. Predstavljajmo si ploščo materiala na spodnji sliki, ki je obremenjena<br />
na nateg.<br />
ǫ
50 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
a<br />
a2<br />
a<br />
a1<br />
α<br />
α<br />
γ/2<br />
γ/2<br />
A<br />
C<br />
B<br />
A'<br />
C'<br />
B'<br />
σ<br />
α = π γ<br />
−<br />
4 2<br />
a1 = a(1 + ǫ)<br />
a2 = a(1 − ǫp) = a(1 − µǫ)<br />
Pri obremenitvi plošče kvadratne oblike se vzdolžna stranica podaljša na a1 = a(1 + ǫ), prečna<br />
pa skrajša na a2 = a(1 − ǫp). Ker je prečni specifični skrček ǫp enak produktu µǫ, pri čemer je µ<br />
poissonov koeficient za dani material, je stranica enaka tudi a2 = a(1 − µǫ). Iz slike je moč zapisati<br />
naslednje povezave:<br />
tanα = tan(45 O − γ/2) = tan 45O − tanγ/2<br />
1 + tan 45O (2.79)<br />
· tanγ/2<br />
Ker so raztezki majhni, so tudi koti majhni. Zato velja tanγ/2 . = γ/2.<br />
tan α =<br />
Tangens kota α pa lahko določimo tudi drugače:<br />
tanα = A′ C ′ 0.5a2<br />
=<br />
OC ′ 0.5a1<br />
1 − tanγ/2<br />
1 + tanγ/2<br />
= 0.5a(1 − µǫ)<br />
= 2 − γ<br />
2 + γ<br />
0.5a(1 + ǫ)<br />
= 1 − µǫ<br />
1 + ǫ<br />
Če gornji enačbi (2.80) <strong>in</strong> (2.81) izenačimo <strong>in</strong> križno množimo, dobimo izraz:<br />
(2.80)<br />
(2.81)<br />
(1 − µǫ)(2 + γ) = (2 − γ)(1 + ǫ) (2.82)<br />
Prispevki produktov ǫγ <strong>in</strong> µǫγ so majhni, zato jih zanemarimo. Tako dobimo:<br />
2 − 2µǫ + γ = 2 − γ + 2ǫ (2.83)<br />
2γ = 2ǫ + 2µǫ (2.84)<br />
kar nam da izraz za deformacijski kot γizražen s Poissonovim koeficientom µali številom m:<br />
če upoštevamo še<br />
γ = ǫ(1 + µ) = ǫ(1 + 1 + 1<br />
) = ǫm<br />
m m<br />
ǫ = σ<br />
E<br />
<strong>in</strong> γ = τ<br />
G<br />
(2.85)<br />
(2.86)
2.4 DEFORMACIJE 51<br />
dobimo:<br />
τ + 1 σ<br />
= γ = ǫm =<br />
G m E<br />
Iz gornje enačbe izrazimo strižni modul elastičnosti G:<br />
G = m<br />
m + 1<br />
τ<br />
σ<br />
m + 1<br />
m<br />
(2.87)<br />
E (2.88)<br />
2.4.8 Dimenzioniranje na čisti nateg - pojem dopustne napetosti<br />
Dimenzioniranje pomeni določitev dimenzij elementa danega materiala, ki prenaša določene obremenitve.<br />
Dimenzije so določene glede na kriterija m<strong>in</strong>imalne porabe materiala <strong>in</strong> prenašanja obremenitev<br />
v območju elastičnih deformacij. Običajno je pri dimenzioniranju upoštevan tudi varnostni<br />
faktor. Predpišemo torej t.i. dopustno napetost, ki ustreza pričakovani največji obremenitvi skupaj s<br />
faktorjem varnosti <strong>in</strong> je še nižja od napetosti σp na meji elastičnosti.
52 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
Primer:<br />
Nosilni element iz jekla prereza S obremenimo s silo F. Določiti želimo presek <strong>in</strong> raztezek za kvadratni<br />
<strong>in</strong> okrogli profil.<br />
S<br />
S<br />
a<br />
F<br />
l0 = 1m<br />
a<br />
d<br />
∆l<br />
F = 210N sila obremenitve<br />
σdop = k ′ = 140N/mm 2<br />
Ejeklo = 2 · 10 5 N/mm 2<br />
dopustna napetost<br />
elastični modul<br />
Presek:<br />
σ = F F<br />
→ S = = 1.5 mm2<br />
S σ<br />
�<br />
π d2 4S<br />
Sokrogel = → d = = 1.382 mm<br />
4 π<br />
Skvadraten = a 2 → a = √ S = 1.225 mm<br />
Raztezek:<br />
ǫ = ∆l<br />
l → ∆l = ǫ l0 = σ<br />
E l0 = 0.7 mm
2.4 DEFORMACIJE 53<br />
2.4.9 Teorija čistega upogiba<br />
Čisti upogib nosilnega elementa nastopi, če je nosilec obremenjen samo z dvojico sil. V realnosti<br />
poleg dvojice sil nastopajo tudi druge obremenitve, zato poleg upogiba delujejo še nateg, torzija <strong>in</strong><br />
strig.<br />
T<br />
A<br />
Mupogibni<br />
Qprecna<br />
A<br />
a<br />
+<br />
F1<br />
F1<br />
l<br />
Mmax = F1 a<br />
Q = 0<br />
F2<br />
F2<br />
M = −F1 x M = F1 x<br />
obremenitev le na upogib<br />
a<br />
-<br />
B<br />
x<br />
B x<br />
Vsota sil v vertikalni smeri:<br />
� Fy = A − F1 − F2 + B = 0<br />
Vsota momentov glede na točko T:<br />
� M = −a F1 − (a + l) F2 + (2 a + l) B = 0<br />
ob predpostavki F1 = F2<br />
so vse sile enake FA = FB = F1 = F2<br />
Obravnavajmo element dx izrezan iz sred<strong>in</strong>e nosilnega elementa, ki je ukrivljen z radijem ρ.<br />
Na področju F1−F2 se bo kvadradni nosilni<br />
element zaradi upogibne obremenitve<br />
deformiral. Črta vzdolž katere se nosilni<br />
element deformira se imenuje deformacijska<br />
krivulja. Na notranji strani<br />
se pojavijo skrčki, na zunanji pa raztezki<br />
elementa.<br />
F1<br />
- - - - - - - - - - - - - - - - - - - - - - - - - - -<br />
+ + + + + + + + + + + + + + + + + + +<br />
ρ<br />
element dx<br />
element dx<br />
Zaradi lažje matematične obravnave obravnavajmo samo polovico elementa. Situacija je predstavljena<br />
na sliki <strong>2.3</strong>5. Glede na Navier-jevo hipotezo, ki pravi da je nosilni element, ki je pred obremenitvijo<br />
ravn<strong>in</strong>ski tudi pod obremenitvijo ravn<strong>in</strong>ski, lahko tudi po obremenitvi rešujemo ravn<strong>in</strong>ski<br />
problem. Desno sta predstavljena diagrama deformacij <strong>in</strong> diagram napetosti v točki A.<br />
skrčki<br />
raztezki<br />
F2
54 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
+e1<br />
−e2<br />
y<br />
C<br />
C ′ −ǫ2<br />
A<br />
AB ′ = dx<br />
̺<br />
D<br />
D ′<br />
H<br />
H ′<br />
dx<br />
+ǫ1 +ǫ1<br />
B<br />
dϕ<br />
G<br />
G ′<br />
B ′<br />
−e2<br />
+e1<br />
DIAGRAM<br />
DIAGRAM<br />
DEFORMACIJ<br />
(ǫ,y)<br />
NAPETOSTI<br />
(σ,y)<br />
−ǫ2<br />
ǫ = 0<br />
ǫ<br />
−σ2<br />
y y<br />
Slika <strong>2.3</strong>5: Deformiran <strong>in</strong>f<strong>in</strong>itizimalni del nosilca ter napetosti <strong>in</strong> deformacije v točki A<br />
S slike so razvidni:<br />
AB ′ sred<strong>in</strong>ska l<strong>in</strong>ija oz. nevtralna os. To je l<strong>in</strong>ija brez deformacij, kjer so napetosti <strong>in</strong> deformacije<br />
enake nič.<br />
∆ACC ′ je trikotnik kotnih skrčkov.<br />
∆ADD ′ je trikotnik kotnih raztezkov.<br />
Koord<strong>in</strong>atni sistem je pozicioniran v točki A<br />
Največji skrček −ǫ2<br />
Največji raztezek +ǫ1<br />
L<strong>in</strong>earne deformacije nosilca so proporcionalne glede na oddaljenost od nevtralne osi, kjer pri<br />
y = 0nastopaǫ = 0 <strong>in</strong> σ = 0. Maksimalna natezna napetost σ1 nastopa na konveksni strani (y =<br />
+e1), medtem ko maksimalna tlačna napetost σ2 nastopa na konkavni strani (y = −e2). Napetosti so<br />
pravokonte (normalne) na prerez <strong>in</strong> so prav tako proporcionalne glede na koord<strong>in</strong>ato y.<br />
y<br />
σ<br />
+σ1<br />
x
2.4 DEFORMACIJE 55<br />
Glede na Hookov zakon so deformacije v l<strong>in</strong>earnem območju proporcionalne napetostim. Povezuje<br />
jih modul elastičnosti:<br />
pri razdalji y : σ = Eǫ<br />
pri razdalji + e1 : σ1 = Eǫ1<br />
(2.89)<br />
pri razdalji − e2 : σ2 = −Eǫ2<br />
Iz podobnih trikotnikov v diagramu (ǫ,y) je možno razbrati, da velja enakost:<br />
ǫ<br />
ǫ1<br />
= y<br />
e1<br />
(2.90)<br />
iz katere lahko določimo deformacijo za točko v notranjosti nosilca, ki je za y oddaljena od nevtralne<br />
osi:<br />
ǫ = ǫ1<br />
y (2.91)<br />
Podobno iz podobnih trikotnikov v diagramu (σ,y) dobimo enakost:<br />
σ<br />
σ1<br />
iz katere lahko določimo napetost v notranjosti nosilca, ki je za y oddaljena od nevtralne osi:<br />
e1<br />
= y<br />
e1<br />
(2.92)<br />
σ = σ1<br />
y (2.93)<br />
Napetosti <strong>in</strong> deformacije v nosilcu nastopijo zaradi delovanja upogibnega momenta M. Če želimo<br />
analizirati povezavo med momentom <strong>in</strong> napetostmi, to lahko storimo preko analize ravnotežnega<br />
stanja. Sile <strong>in</strong> momenti teh sil morajo namreč biti v ravnotežju z rezultanto <strong>in</strong> momentom zunanjih sil,<br />
če te reduciramo na prerez. Situacija je prikazana na spodnji sliki. Za analizo je zanimivo ravnotežje<br />
M<br />
e1<br />
−σ2<br />
x<br />
+σ1<br />
−e2<br />
A T x A ′<br />
dS dS<br />
Slika <strong>2.3</strong>6: Ravnotežno stanje ob zunanjem momentu<br />
vzdolž osi x, saj vzdolž te osi nastopajo natezne <strong>in</strong> tlačne napetosti, ki so posledica ploskovnih sil<br />
e1<br />
dN = σdS (2.94)<br />
y<br />
y<br />
S<br />
z
56 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
pri čemer se napetost σ sprem<strong>in</strong>ja glede na enačbo (2.93). Ker na prerezu ne deluje tudi rezultanta<br />
sila, ima ravnotežna enačba obliko:<br />
�<br />
� �<br />
Fxi = dN = σdS = σ1<br />
�<br />
ydS = 0 (2.95)<br />
Napetost σ1 <strong>in</strong> razdalja e1 nista enaki nič, zato mora veljati<br />
S<br />
�<br />
S<br />
S<br />
e1<br />
S<br />
ydS = 0 (2.96)<br />
Izraz na levi strani gornje enačbe predstavlja statični moment ploskve S glede na os z <strong>in</strong> je enaka nič<br />
kadar os z prebada težišče lika. Ker je os z hkrati tudi nevtralna os, lahko na podlagi gornje ugotovitve<br />
naredimo zaključek o legi nevtralne osi: Nevtralna os z ničelnimi deformacijami <strong>in</strong> napetostmi ob<br />
čistem upogibu poteka skozi težišče lika prereza, kadar se material obnaša po Hookovem zakonu <strong>in</strong><br />
na prerez ne delujejo dodatne sile. Povedano velja za prereze, ki so simetrični glede na os y.<br />
Analizirajmo še ravnotežje momentov:<br />
iz česar sledi<br />
M =<br />
� Mzi = M −<br />
� e1<br />
e2<br />
ydN =<br />
� e1<br />
e2<br />
� e1<br />
e2<br />
ydN = 0 (2.97)<br />
yσdS = σ1<br />
e1<br />
� e1<br />
e2<br />
y 2 dS (2.98)<br />
V gornji enačbi člen � y2dS označimo z Iz <strong>in</strong> ga imenujemo vztrajnostni moment ploskve 2. reda<br />
okrog osi z, pri čemer je y razdalja do osi z:<br />
�<br />
Iz = y 2 dS (2.99)<br />
Vztrajnostni moment ploskve je geometrijska lastnost. Upoštevajoč gornjo enačbo (2.99) lahko zapišemo:<br />
M = σ1<br />
� e1<br />
y 2 dS = σ1<br />
(2.100)<br />
e1<br />
e2<br />
Iz<br />
e1<br />
S preureditvijo zapišemo enačbo, s pomočjo katere določimo napetost v poljubni točki:<br />
Napetosti σ1 <strong>in</strong> σ2 pa sta:<br />
σ = σ1<br />
y = M<br />
y (2.101)<br />
e1<br />
Iz<br />
y = −e2 : −σ2 = M<br />
Iz e2<br />
y = e1 : σ1 = M<br />
Iz e1<br />
(2.102)<br />
Za primere nosilcev s simetričnim prerezom, ki imajo težišče lika na sred<strong>in</strong>i, velja e1 = e2 <strong>in</strong> tudi<br />
|σ1| = |σ2|. Za primer nosilca npr. s trikotnim prezom, kjer leži težišče lika na 1/3 viš<strong>in</strong>e lika h<br />
(e1 = 1/3h,e2 = −2/3), pa dobimo |σ2| = 2|σ1|.
2.4 DEFORMACIJE 57<br />
2.4.9.1 Upogibnica - deformacijska središčnica<br />
Zakrivljena skeletnica, vzdolž katere se nosilec pod obremenitvijo deformira, sovpada z osjo x. Krivuljo<br />
imenujemo deformacijska krivulja ali upogibnica. Leži v ravn<strong>in</strong>i x−y, opišemo pa jo s funkcijo<br />
y = f(x). S pomočjo spodnje slike zapišemo diferencialno enačbo upogibnice.<br />
e2<br />
A<br />
e1 β dx<br />
C D<br />
dϕ<br />
O<br />
B<br />
̺<br />
Iz podobnih trikotnikov zapišemo:<br />
AB<br />
OA<br />
= CD<br />
AC<br />
pri čemer so razdalje enake<br />
⇒ CD = AB<br />
OA AC<br />
AB = dx<br />
OA = ̺<br />
AC = β<br />
iz def<strong>in</strong>icije specifičnega raztezka pa sledi<br />
CD = ǫdx<br />
Navedeno uporabimo v enačbi za CD <strong>in</strong> dobimo:<br />
ǫdx = dx β<br />
β ⇒ ǫ =<br />
̺ ̺<br />
oz. ̺ = β<br />
ǫ<br />
(2.103)<br />
Ker je specifični raztezek z napetostjo povezan preko modula elastičnosti E <strong>in</strong>, ker za napetost<br />
velja enačba (2.101), lahko zapišemo tudi:<br />
ǫ = σ<br />
E<br />
M<br />
= β oz.<br />
EIz<br />
ǫ<br />
β<br />
= M<br />
EIz<br />
(2.104)<br />
Če za kvocient ǫ/β uporabimo izraz (2.103), dobimo povezavo med momentom <strong>in</strong> kriv<strong>in</strong>skim radijem<br />
̺:<br />
1<br />
̺<br />
= M<br />
EIz<br />
V splošnem je v geometriji enačba za kriv<strong>in</strong>ski radij v ravn<strong>in</strong>i x − y enaka<br />
̺ =<br />
[1 − ( dy<br />
dx )2 ] 3/2<br />
d 2 y<br />
d 2 x<br />
(2.105)<br />
(2.106)
58 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
tangenta na upogibnico y = f(x). V tehniki običajno nastopajo majhni upogibi <strong>in</strong><br />
s tem majhni koti. Zato lahko v primerjavi z 1 zanemarimo člen dy dy<br />
(1 >> ( dx dx )2 ). Tako se enačba<br />
upogibnice poenostavi v<br />
oz. ̺ = 1<br />
y ′′<br />
(2.107)<br />
kjer je odvod dy<br />
dx<br />
̺ = 1<br />
d 2 y<br />
d 2 x<br />
Z uporabo enačbe (2.105) izpeljemo končno enačbo upogibnice:<br />
1<br />
̺ = d2y dx2 = y′′ = M<br />
EIz<br />
(2.108)<br />
v kateri nastopa moment M, ki je funkcija x-a (M = M(x)). Dvakratno <strong>in</strong>tegriranje da enačbo<br />
upogibnice y = y(x). Pri tem rabimo dve <strong>in</strong>tegracijski konstanti c1 <strong>in</strong> c2, ki ju določimo iz robnih<br />
pogojev. Upoštevamo, da sta upogiba v podporah enaka nič.
2.4 DEFORMACIJE 59<br />
2.4.10 Izračun napetosti pri strigu<br />
Pri določanju strižnih napetosti velja Grasfova hipoteza. Po tej hipotezi, ki velja za simetrične prereze<br />
nosilcev, pri katerih je vertikalna y os simetrala, se smeri vseh tangencialnih napetosti τx na horizontalni<br />
tetivi AB stekajo v skupni točki P na simetralni osi (glej spodnjo sliko <strong>2.3</strong>7). Strižno napetost τx<br />
v poljubni točki tetive AB razstavimo v komponenti τxy <strong>in</strong> τxz. Točka P je presečišče tangencialnih<br />
napetosti τxa <strong>in</strong> τxb <strong>in</strong> te imajo smer tangent na konturo v točkah A <strong>in</strong> B. Napetost τxy v vseh točkah<br />
tetive A do B zavzame isto vrednost, saj gre v vseh primerih za isto razdaljo y.<br />
y<br />
A<br />
τxya<br />
τxa<br />
zi<br />
T<br />
τxza τxz<br />
τxy τx<br />
Q<br />
C<br />
D<br />
ϕ ϕi<br />
P<br />
y<br />
ds<br />
zi<br />
S<br />
τxzb<br />
τxb<br />
Slika <strong>2.3</strong>7: Strižne napetosti<br />
Iz ravnotežnega pogoja za zunanjo silo Q <strong>in</strong> notranjih ploskovnih sil v smeri y osi lahko podobno<br />
kot v prejšnjem primeru izpeljemo enačbo za napetost τxy, ki se glasi:<br />
τxy = Q<br />
�<br />
yds<br />
Iz<br />
2zi<br />
B<br />
τxyb<br />
z<br />
(2.109)
60 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
kjer je:<br />
2zi šir<strong>in</strong>a tetive AB<br />
Iz vztrajnostni moment celega profila glede na težiščno os z<br />
Q<br />
�<br />
zunanja strižna sila v smeri simetrale y<br />
yds statični moment ploskve, ki je pod tetivo AB<br />
Iz napetosti τxy lahko izračunamo napetost τxz <strong>in</strong> rezultanto τx v poljubni točki tetive AB.<br />
ϕ<br />
τxy<br />
τxz<br />
τx<br />
Na podlagi slike zapišemo:<br />
τxz = τx s<strong>in</strong> ϕ<br />
τxz = τxy tanϕ<br />
τxy = τx cos ϕ<br />
tanϕ = τxz<br />
τxy<br />
τx = � τ2 xy + τ2 �<br />
2<br />
xz = τxy 1 + tan ϕ<br />
Napetosti τxz <strong>in</strong> τx imata največjo vrednost pri velikem kotu ϕ, to je v točkah A <strong>in</strong> B, kjer velja:<br />
|τxza| = |τxzb| = τxy tanϕi<br />
�<br />
2<br />
|τxa| = |τxb| = τxy 1 + tan ϕi<br />
V točki C je kot ϕ enak nič, zato tudi tanϕ, kar pomeni, da je v tej točki:<br />
Iz trigonometrijskih razmerij velja:<br />
tanϕ = z<br />
CP<br />
tanϕi = zi<br />
CP<br />
τxzc = 0<br />
⇒ tanϕ<br />
tanϕi<br />
τxc = τxyc<br />
= z<br />
zi<br />
⇒ tanϕ = z<br />
zi<br />
tanϕi<br />
iz česar dobimo končen rezultat za določitev napetosti striga v notranjosti nosilnega elementa:<br />
τxz = τxy tanϕ = τxy z tan ϕi zi<br />
� �<br />
2<br />
τx = τxy 1 + tan ϕ = τxy 1 + ( z tanϕi) 2<br />
zi<br />
(2.110)<br />
(2.111)
2.4 DEFORMACIJE 61<br />
2.4.11 Izračun napetosti pri torziji<br />
V ravn<strong>in</strong>i profila nosilca deluje dvojica sil, ki predstavlja reducirane zunanje sile, <strong>in</strong> sicer tako, da je<br />
nosilec obremenjen na čisti torzijski moment. Moment torzije se pojavi vzdolž longitud<strong>in</strong>alne osi x.<br />
A<br />
F<br />
γ<br />
l<br />
B ′<br />
Nosilec z dolž<strong>in</strong>o l se bo zaradi momenta Mx deformiral spiralno okoli osi x za kot ϕ. Zaradi<br />
toge vpetosti na eni strani se pojavi trikotnik ∆ABB ′ , zaradi česar se prvotno ravno vlakno A − B<br />
deformira v vijačno vlakno A − B ′ z deformacijskim kotom γ. Določitev torzijskih napetosti temelji<br />
na dveh ugotovitvah. Prvič, radialni zožki, ki izhajajo iz središča kroga T za majhne kote ostanejo<br />
ravni tudi po obremenitvi s torzijskim momentom (Navierova hipoteza) <strong>in</strong> drugič, torzijske napetosti<br />
τ so proporcionalne koncentričnim ločnim zasukom v notranjosti profila (Hookov zakon). Razmere<br />
v ravn<strong>in</strong>i x − y so prikazane na spodnji sliki:<br />
'<br />
B<br />
ϕ ϕ<br />
B<br />
r<br />
B<br />
Mt Mt<br />
T<br />
̺ ̺<br />
ϕ<br />
a<br />
τmax<br />
y<br />
r<br />
τ<br />
x<br />
d̺<br />
τmax<br />
F ′
62 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
Torzijske napetosti τ so porazdeljene po premeru kroga <strong>in</strong> so maksimalne na obodu τmax. Moment<br />
Mt bo zavrtel točko B v B ′ za kot ϕ, lok TB ′ bo ostal raven zaradi Navierove hipoteze, zato bodo<br />
tudi torzijske napetosti τ proporcionalne radiju ̺. Tako lahko iz slike zapišemo:<br />
τ<br />
τmax<br />
= ̺<br />
r<br />
⇒ τ = τmax<br />
r ̺<br />
pri ̺ = 0 : τ = 0<br />
pri ̺ = r : τ = τmax<br />
Torzijske napetosti morajo biti v ravnotežju z zunanjim momentom Mt:<br />
Z upoštevanjem (2.112) dobimo:<br />
It:<br />
Mt = Mx = Fa =<br />
Mt = τmax<br />
r<br />
� r<br />
0<br />
� r<br />
0<br />
̺τds (2.112)<br />
̺ 2 ds (2.113)<br />
Člen pod <strong>in</strong>tegralom je def<strong>in</strong>iran kot polarni vztrajnostni moment profila glede na pol v točki T<br />
Ravnotežna enačba tako dobi obliko<br />
� r<br />
It =<br />
0<br />
iz česar izrazimo maksimalno torzijsko napetost:<br />
Mt = τmax<br />
r It<br />
τmax = Mt<br />
<strong>in</strong> torzijsko napetost za poljubno točko v notranjosti:<br />
̺ 2 ds (2.114)<br />
It<br />
(2.115)<br />
r (2.116)<br />
τ = Mt<br />
̺ (2.117)<br />
Pri torzijski obremenitvi je pomemben parameter tudi torzijski kot ϕ, ki ga izpeljemo iz geometrije<br />
problema, pri čemer upoštevamo, da za majhne kote velja s<strong>in</strong> ϕ . = ϕ <strong>in</strong> tanγ . = γ:<br />
torej<br />
It<br />
BB ′ = r s<strong>in</strong> ϕ . = rϕ = l tanγ . = lγ (2.118)<br />
rϕ = lγ oz. ϕ = lγ<br />
(2.119)<br />
r<br />
kar je povezava med torzijskim kotom ϕ <strong>in</strong> deformacijskim kotom γ. Ko bo torzijska napetost maksimalna,<br />
bo tudi torzijski kot maksimalen.
2.4 DEFORMACIJE 63<br />
Po Hookovem zakonu sta torzijska deformacija <strong>in</strong> napetost povezana preko strižnega modula G:<br />
Če gornje uporabimo v (2.119) dobimo<br />
ϕ = lγ<br />
r<br />
γ = τmax<br />
G<br />
l 1<br />
=<br />
r G<br />
= 1<br />
G<br />
Mt<br />
It<br />
Mt<br />
It<br />
r (2.120)<br />
r = Mt<br />
l (2.121)<br />
GIz<br />
iz česar lahko razberemo, da torzijski kot l<strong>in</strong>earno narašča z dolž<strong>in</strong>o profila l <strong>in</strong> momentom Mt ter je<br />
obratno sorazmeren s strižnim modulom G <strong>in</strong> polarnim vztrajnostnim momentom It:<br />
2.4.11.1 Dimenzioniranje na torzijo<br />
ϕ = Mt<br />
l (2.122)<br />
GIz<br />
Pri preprostih primerih obremenitve, kjer obstaja l<strong>in</strong>earna povezava med napetostjo <strong>in</strong> deformacijo,<br />
se material trajno deformira, ko napetost preseže mejo elastičnosti.<br />
Profil dimenzioniramo na torzijo tako, da maksimalna torzijska napetost nosilca na obodu τmax ne<br />
preseže maksimalne dopustne torzijske napetosti, ki jo označimo s kT<br />
oz.<br />
τmax ≤ kT ⇒ kT = Mt<br />
r (2.123)<br />
It<br />
r<br />
= Mt<br />
kT<br />
= Wt<br />
Slednji kvocient imenujemo polarni odpornostni moment Wt.<br />
Primer za poln krožni profil:<br />
� r<br />
It =<br />
0<br />
̺ 2 ds =<br />
� r<br />
0<br />
̺ 2 � r<br />
(2̺πd̺) = 2π ̺<br />
0<br />
3 d̺ = 2π ̺4<br />
4 |40 = πr4<br />
2<br />
Wt = πr3<br />
2<br />
= Mt<br />
kT<br />
iz česar določimo polmer r ali premer d za polno palico:<br />
r = 3<br />
d = 3<br />
�<br />
2Mt<br />
kT π �<br />
16Mt<br />
kT π<br />
Primer za cevast krožni profil z zunanjim premerom r <strong>in</strong> notranjim premerom r0:<br />
It<br />
(2.124)<br />
(2.125)<br />
(2.126)<br />
(2.127)
64 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
z uvedbo r<br />
r0<br />
= n dobimo:<br />
It = πr4<br />
2 − πr4 0<br />
2<br />
It = πr4<br />
2<br />
iz česar določimo polmer r za votlo palico:<br />
= πr4<br />
2 [1 − r4 0<br />
r 4]<br />
(2.128)<br />
1 πr4<br />
[1 −<br />
n4] =<br />
2 [n4 − 1<br />
n4 ] (2.129)<br />
Wt = It<br />
r = 3<br />
r<br />
= Mt<br />
kT<br />
�<br />
n4 n4 2Mt<br />
−1 πkT<br />
2.4.12 Sočasna obremenitev na upogib <strong>in</strong> nateg oz. tlak<br />
(2.130)<br />
(2.131)<br />
Primer takšne vrste obremenitve je izvenosno obremenjen nosilec kot to prikazuje spodnja slika. Sila<br />
F deluje izven središčnice na ročici dolž<strong>in</strong>e m. Če silo zreduciramo na središčnico v sili F ′ <strong>in</strong> F ′′ ,<br />
dobimo komb<strong>in</strong>acijo upogiba (ki ga povzročata F <strong>in</strong> F ′ ) <strong>in</strong> natega (ki ga povzroča F ′′ ).<br />
F<br />
σ ′′′<br />
1<br />
B<br />
F<br />
A<br />
′<br />
F ′′<br />
m<br />
o<br />
y<br />
o<br />
x<br />
σr1<br />
l1<br />
σr<br />
y<br />
y<br />
o<br />
o<br />
y0<br />
l2<br />
σ ′<br />
σ ′′′<br />
2<br />
σr2<br />
Sila F ′′ povzroča natezno napetost na površ<strong>in</strong>i S<br />
σ ′ =<br />
F ′′<br />
S<br />
Diagram upogibnih obremenitev, je posledica<br />
delovanja momenta M = Fm (M = Fy)<br />
σ ′′′<br />
1 - nateg, σ ′′′<br />
2 - tlak<br />
Oba diagrama seštejemo <strong>in</strong> dobimo σr<br />
σr = σ ′ ± σ ′′′<br />
σr1 = σ ′ + σ ′′′<br />
1 = F M + S Iz l1 = F Fm + S Iz l1<br />
σr2 = σ ′ − σ ′′′<br />
2 = F<br />
S<br />
− M<br />
Iz l2 = F<br />
S<br />
− Fm<br />
Iz l2<br />
V splošnem velja, da je rezultančna napetost na poljubnem mestu enaka<br />
σr = σ ′ + σ ′′′ = F<br />
S<br />
M<br />
+ y =<br />
Iz<br />
F<br />
S<br />
Fm<br />
+ y (2.132)<br />
Iz
2.4 DEFORMACIJE 65<br />
Nevtralna os oziroma točka o se premakne v desno, kar pomeni, da se je območje tlačnih napetosti<br />
vsled upogiba zmanjšalo, nateznih pa povečalo. Premik nevtralne osi (razdalja oo ′ = y0) izračunamo<br />
iz pogoja σr = 0:<br />
σr = F<br />
S<br />
Fm<br />
+ y = 0 ⇒ −<br />
Iz<br />
1<br />
S<br />
m<br />
= y0<br />
Iz<br />
(2.133)<br />
y0 = − 1 Iz<br />
(2.134)<br />
S m<br />
Iz rezultata je razvidno, da je premik nevtralne osi y0 neodvisen od velikosti sile; odvisen je samo od<br />
ročice m <strong>in</strong> prereza S. Za majhne razdalje m bo premik y0 velik oz. m → 0 ⇒ y0 → <strong>in</strong>f. V tem<br />
primeru preko celega nosilca nastopi enaka napetost.
66 Poglavje 2. STATIKA - OBRAVNAVA MATERIALNIH TELES V MIROVANJU<br />
2.4.13 Sočasna obremenitev na upogib <strong>in</strong> torzijo<br />
Do sočasne obremenitve na upogib <strong>in</strong> torzijo pride, kadar je enostransko vpeti nosilec obremenjen na<br />
koncu z ekscentrično silo. Reducirana sila v os povzroča obremenitev na upogib Mu = Fx, preostali<br />
sili pa torzijski moment Mt = Fm.<br />
D<br />
−σx<br />
Mt = Fn<br />
Mu,max = Fl<br />
A<br />
o<br />
B<br />
σx<br />
C<br />
τxz<br />
Torzijska obremenitev<br />
Upogibna obremenitev<br />
l<br />
Za analizo so zanimiva tista mesta, ki so najbolj obremenjena. V tem primeru je to prerez na<br />
mestu vpetja. Upogibni moment je največji v točkah A <strong>in</strong> B. To sta tudi točki največje obremenitve,<br />
saj je velikost strižne napetosti τxy po celem obodu enaka.<br />
V točki A(x,y,z) delujeta napetosti σx <strong>in</strong> τxz. Ti napetosti določimo<br />
kjer so<br />
Mt<br />
σx = σux,max = Mu<br />
It r<br />
τxz = τxz,max = Mt<br />
2Iz r<br />
Mu = Fl upogibni moment,<br />
r razdalja od izhodišča do točke, ki nas zanima,<br />
2Iz = It polarni vztrajnostni moment za krog.<br />
r<br />
z<br />
o<br />
F<br />
m<br />
y<br />
F<br />
x<br />
(2.135)<br />
(2.136)<br />
V smeri y ni obremenitve, torej je σy = 0 <strong>in</strong> primer lahko obravnavamo kot ravn<strong>in</strong>sko stanje<br />
napetosti v x − z ravn<strong>in</strong>i z obremenitvami<br />
σx = Mu<br />
It r τxz = Mt<br />
2Iz r σz = 0 τzx = Mt<br />
2Iz r
2.4 DEFORMACIJE 67<br />
Ker so def<strong>in</strong>irane vse napetosti v x −z ravn<strong>in</strong>i, lahko izračunamo glavne napetosti v točki A(x,z)<br />
σ1 <strong>in</strong> σ3 (<strong>in</strong>deksa 1 <strong>in</strong> 3 pomenita os x <strong>in</strong> z):<br />
σ1,3 = 1<br />
2 (σx<br />
�<br />
1<br />
+ σz) ±<br />
4 (σx − σz) 2 + τ2 xz<br />
(2.137)<br />
Ob predpostavki, da je σz = 0, dobimo<br />
σ1,3 = σx<br />
2 ±<br />
� σ 2 x<br />
4 + τ2 xz<br />
σ1,3 = Mu<br />
2Iz ±<br />
�<br />
M2 u<br />
4I2 +<br />
z<br />
M2 t<br />
4I2 r<br />
z<br />
2<br />
σ1,3 = r<br />
2Iz (Mu ± � M 2 u + M 2 t )<br />
(2.138)<br />
Pri kompleksnem delovanju napetosti velja, da pride do porušitve nosilnega elementa, ko ena<br />
od glavnih napetosti doseže prag plastične deformacije preproste enoosne obremenitve, ki jo npr.<br />
označimo z σ0. To predvsem velja za krhke materiale. Za gornji primer torej<br />
σ1 ali σ3 = σ0 (2.139)<br />
Za voljne materiale pa velja, da pride do porušitve, ko prag plastične deformacije enostavne obremenitve<br />
doseže maksimalna tangecialna napetost. Ta je def<strong>in</strong>irana kot polovica razlike glavnih napetosti<br />
(glej enačbo (??)). Torej bi v tem primeru veljalo<br />
σ1 − σ3<br />
2<br />
= σ0<br />
(2.140)