

metoda pracy wirtualnej
metoda pracy wirtualnej
metoda pracy wirtualnej

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
UKŁADY STATYCZNIE WYZNACZALNE<br />
OBLICZANIE PRZEMIESZCZEŃ UKŁADÓW STATYCZNIE<br />
WYZNACZALNYCH Z ZASTOSOWANIEM RÓWNANIA PRACY<br />
WIRTUALNEJ.<br />
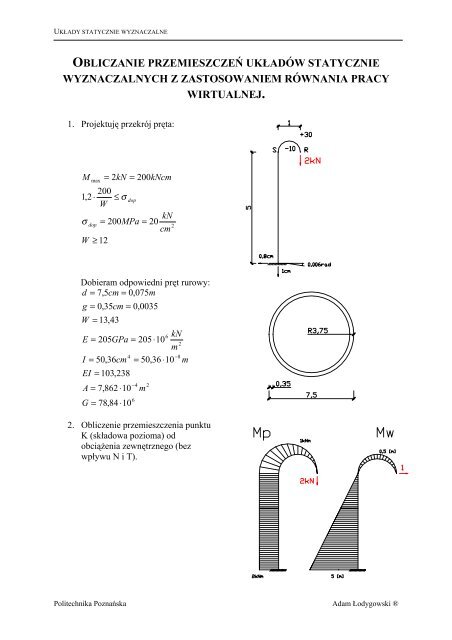
1. Projektuję przekrój pręta:<br />
M<br />
max<br />
= 2kN<br />
= 200kNcm<br />
200<br />
1,2 ⋅ ≤ σ<br />
dop<br />
W<br />
kN<br />
σ<br />
dop<br />
= 200MPa<br />
= 20<br />
cm<br />
W ≥ 12<br />
2<br />
Dobieram odpowiedni pręt rurowy:<br />
d = 7,5cm<br />
= 0,075m<br />
g = 0,35cm<br />
= 0,0035<br />
W = 13,43<br />
6 kN<br />
E = 205GPa<br />
= 205⋅10<br />
2<br />
m<br />
4<br />
−8<br />
I = 50,36cm<br />
= 50,36 ⋅10<br />
m<br />
EI = 103,238<br />
A = 7,862 ⋅10<br />
G = 78,84 ⋅10<br />
−4<br />
6<br />
m<br />
2. Obliczenie przemieszczenia punktu<br />
K (składowa pozioma) od<br />
obciążenia zewnętrznego (bez<br />
wpływu N i T).<br />
2<br />
Politechnika Poznańska Adam Łodygowski ®
UKŁADY STATYCZNIE WYZNACZALNE<br />
x = R(1<br />
− cosϕ)<br />
y = Rsinϕ<br />
ϕ ∈ 0; π<br />
R = 0,5<br />
1⋅<br />
∆ =<br />
∆ = 0,23m<br />
M ⋅ M<br />
EI<br />
⎡kNm<br />
⋅ m ⎤<br />
⋅ ds ⇒<br />
⎢ m =<br />
2<br />
⎣ kNm<br />
⎥<br />
⎦<br />
[ m]<br />
⎤<br />
Rsinϕ2R(1<br />
− cosϕ)<br />
Rdϕ⎥<br />
⎦<br />
π<br />
1 ⎡<br />
⎤<br />
∆ = ⎢25<br />
+ 0,25 sin (1 cos ) d<br />
EI<br />
∫ ϕ − ϕ ϕ⎥<br />
⎣<br />
0<br />
⎦<br />
π<br />
cosϕ<br />
= t<br />
∫ sinϕ(1<br />
− cosϕ)<br />
dϕ<br />
=<br />
=<br />
sinϕdϕ<br />
= dt<br />
0<br />
π<br />
∫<br />
0<br />
1 ⎡<br />
∆ = ⎢25<br />
+<br />
EI ⎣<br />
π<br />
∫<br />
0<br />
π<br />
∫<br />
0<br />
dt<br />
sinϕ(1<br />
− t)<br />
=<br />
sinϕ<br />
2 π<br />
2<br />
[ t − 0,5t<br />
] = [ cosϕ<br />
− 0,5cos ϕ]<br />
0<br />
π<br />
0<br />
= −3<br />
3. Obliczenie przemieszczenia punktu K (składowa pionowaa) od obciążenia<br />
zewnętrznego łącznie z wpływem N i T.<br />
Politechnika Poznańska Adam Łodygowski ®
UKŁADY STATYCZNIE WYZNACZALNE<br />
Politechnika Poznańska Adam Łodygowski ®<br />
1)<br />
(sin<br />
1<br />
1)<br />
(sin<br />
2<br />
sin<br />
1<br />
sin<br />
2<br />
)<br />
cos<br />
(1<br />
1<br />
)<br />
cos<br />
(1<br />
2<br />
−<br />
⋅<br />
=<br />
−<br />
⋅<br />
=<br />
⋅<br />
=<br />
⋅<br />
=<br />
−<br />
⋅<br />
=<br />
−<br />
⋅<br />
=<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
N<br />
N<br />
T<br />
T<br />
R<br />
M<br />
R<br />
M<br />
p<br />
p<br />
p<br />
[ ]<br />
[ ] [ ] [ ] 108<br />
0,<br />
0,0000097<br />
0,000025<br />
0,108<br />
0,5<br />
10<br />
1<br />
0,5<br />
1<br />
1,5<br />
0,25<br />
10<br />
1<br />
0,5<br />
0,5<br />
2<br />
1<br />
cos<br />
sin<br />
2<br />
1<br />
)<br />
sin<br />
(1<br />
0,5<br />
2<br />
1<br />
cos<br />
sin<br />
2<br />
1<br />
sin<br />
1,5<br />
2<br />
1<br />
2<br />
2<br />
1<br />
cos<br />
sin<br />
2<br />
1<br />
)<br />
sin<br />
(1<br />
2sin<br />
cos<br />
2cos<br />
1<br />
)<br />
cos<br />
(1<br />
)<br />
sin<br />
(1<br />
1<br />
10<br />
1<br />
sin<br />
1<br />
1<br />
0<br />
1<br />
)<br />
cos<br />
(1<br />
0,25<br />
10<br />
1<br />
)<br />
sin<br />
(1<br />
2<br />
1<br />
5<br />
2<br />
1<br />
sin<br />
2<br />
0<br />
1<br />
)<br />
cos<br />
(1<br />
2<br />
5<br />
2<br />
1<br />
1<br />
1<br />
1<br />
0<br />
0<br />
0<br />
2<br />
0<br />
0<br />
2<br />
0<br />
0<br />
0<br />
2<br />
0<br />
0<br />
0<br />
2<br />
0<br />
0<br />
0<br />
2<br />
0<br />
2<br />
0<br />
2<br />
0<br />
2<br />
0<br />
2<br />
0<br />
2<br />
0<br />
2<br />
3<br />
2<br />
0<br />
0<br />
0<br />
=<br />
+<br />
+<br />
=<br />
+<br />
+<br />
+<br />
⋅<br />
+<br />
∆ =<br />
=<br />
−<br />
=<br />
+<br />
−<br />
−<br />
=<br />
−<br />
=<br />
+<br />
−<br />
=<br />
=<br />
−<br />
=<br />
+<br />
−<br />
−<br />
+<br />
=<br />
−<br />
+<br />
−<br />
=<br />
+<br />
−<br />
=<br />
−<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
+<br />
+<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
⋅<br />
+<br />
+<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
+<br />
∆ =<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
+<br />
⋅<br />
⋅<br />
+<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡ +<br />
+<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
⋅<br />
+<br />
⋅<br />
⋅<br />
∆ =<br />
⋅<br />
=<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
+<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
+<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
⋅<br />
⇒<br />
⋅<br />
+<br />
⋅<br />
+<br />
⋅<br />
∆ =<br />
⋅<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
∫<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
π<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
π<br />
π<br />
π<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
π<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕ<br />
ϕκ<br />
ϕ<br />
ϕ<br />
κ<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
π<br />
EA<br />
GA<br />
EI<br />
ds<br />
d<br />
d<br />
d<br />
d<br />
d<br />
d<br />
d<br />
EA<br />
d<br />
GA<br />
d<br />
EI<br />
d<br />
R<br />
EA<br />
d<br />
R<br />
GA<br />
d<br />
R<br />
EI<br />
m<br />
m<br />
kN<br />
kN<br />
m<br />
kN<br />
kN<br />
m<br />
kNm<br />
m<br />
kNm<br />
ds<br />
EA<br />
N<br />
N<br />
ds<br />
GA<br />
T<br />
T<br />
ds<br />
EI<br />
M<br />
M
UKŁADY STATYCZNIE WYZNACZALNE<br />
4. Obliczenie obrotu przekroju od obciążenia zewnętrznego (bez wpływu N i T).<br />
1⋅ϕ<br />
=<br />
π<br />
∫<br />
0<br />
M ⋅ M<br />
EI<br />
1 ⎡<br />
ϕ = ⎢1<br />
⋅ 2 ⋅ 5 +<br />
EI ⎣<br />
1 ⎡ ⎛<br />
ϕ = ⎢10<br />
+ 0,5⎜<br />
EI<br />
⎢⎣<br />
⎝<br />
1<br />
ϕ =<br />
EI<br />
⎡ kNm ⋅ ⎤<br />
⋅ ds ⇒ ⎢ m =<br />
2<br />
kNm<br />
⎥<br />
⎣ ⎦<br />
π<br />
∫<br />
0<br />
π<br />
∫<br />
0<br />
⎤<br />
2<br />
2R<br />
(1 − cosϕ)<br />
dϕ⎥<br />
⎦<br />
1dϕ<br />
−<br />
⎞⎤<br />
cosϕdϕ<br />
⎟<br />
⎥<br />
⎠⎥⎦<br />
[] − = [ rad]<br />
π 1<br />
[ 10 + 0,5( π − sinϕ<br />
)] = (10 + 0,5π<br />
) = 0,112rad<br />
0<br />
π<br />
∫<br />
0<br />
EI<br />
5. Obliczenie wzajemnego przemieszczenia punktów R i S od zmiany temperatury.<br />
t<br />
t<br />
t<br />
d<br />
g<br />
m<br />
t<br />
= −10<br />
= 30<br />
= 5<br />
o<br />
g<br />
o<br />
o<br />
h = 7,5cm<br />
= 0,075m<br />
α = 1,2 ⋅10<br />
tg<br />
+ td<br />
to<br />
=<br />
2<br />
∆t<br />
= t − t<br />
d<br />
−5<br />
− t<br />
m<br />
= 40<br />
= 5<br />
o<br />
Politechnika Poznańska Adam Łodygowski ®
UKŁADY STATYCZNIE WYZNACZALNE<br />
1⋅<br />
∆RS<br />
=<br />
∆RS<br />
=<br />
π<br />
∫<br />
R<br />
∆RS<br />
= 0,0016<br />
0<br />
π<br />
∫<br />
0<br />
α<br />
t∆t<br />
M ds +<br />
h<br />
2<br />
sinϕ0,0064dϕ<br />
+<br />
π<br />
∫<br />
0<br />
π<br />
∫<br />
0<br />
sinϕdϕ<br />
+ 0,00003<br />
0<br />
⎡ 1⋅<br />
C ⎤<br />
Nα<br />
tt0ds<br />
⇒ ⎢m<br />
⋅ m =<br />
0 ⎥<br />
⎣ C ⋅ m ⎦<br />
Rsinϕ0,00006dϕ<br />
sinϕdϕ<br />
[ m]<br />
∆RS<br />
= 0,0016 ⋅ 2 + 0,00003⋅<br />
2 = 0,00314m<br />
6. Obliczenie obrotu cięciwy RS od osiadania podpór.<br />
π<br />
∫<br />
0<br />
π<br />
∫<br />
0<br />
1⋅<br />
ϕRS<br />
+<br />
∑<br />
R∆ = 0 ⇒<br />
1⋅<br />
ϕRS<br />
− 1⋅<br />
(0,006) = 0<br />
ϕRS<br />
= 0,006rad<br />
[ rad]<br />
Politechnika Poznańska Adam Łodygowski ®














