Linearna i nelinearna reaktivna TR - LEDA
Linearna i nelinearna reaktivna TR - LEDA
Linearna i nelinearna reaktivna TR - LEDA

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
•Analiza linearnih kola u vremenskom domenu<br />
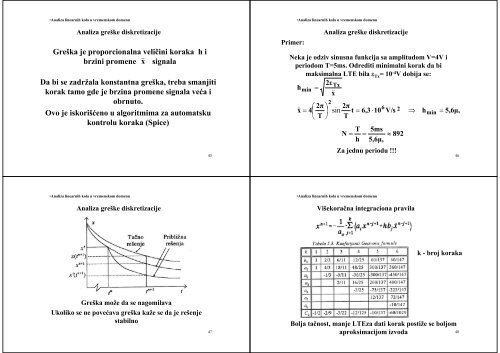
Analiza greške diskretizacije<br />
Greška je proporcionalna veličini koraka h i<br />
brzini promene & x& signala<br />
Da bi se zadržala konstantna greška, treba smanjiti<br />
korak tamo gde je brzina promene signala veća i<br />
obrnuto.<br />
Ovo je iskorišćeno u algoritmima za automatsku<br />
kontrolu koraka (Spice)<br />
45<br />
Primer:<br />
•Analiza linearnih kola u vremenskom domenu<br />
Analiza greške diskretizacije<br />
Neka je odziv sinusna funkcija sa amplitudom V=4V i<br />
periodom T=5ms. Odrediti minimalni korak da bi<br />
maksimalna LTE bila ε Tx = 10 -4 V dobija se:<br />
2ε<br />
h<br />
Tx<br />
min =<br />
&& x<br />
2<br />
⎛ 2π ⎞<br />
&& x = 4⎜<br />
⎟<br />
⎝ T ⎠<br />
2π<br />
6<br />
sin t = 6,3 ⋅10<br />
V/s<br />
T<br />
N =<br />
T<br />
h<br />
=<br />
5ms<br />
5,6µ,<br />
2<br />
≈ 892<br />
Za jednu periodu !!!<br />
⇒<br />
h<br />
min<br />
= 5,6µ,<br />
46<br />
•Analiza linearnih kola u vremenskom domenu<br />
Analiza greške diskretizacije<br />
•Analiza linearnih kola u vremenskom domenu<br />
Višekoračna integraciona pravila<br />
k - broj koraka<br />
Greška može da se nagomilava<br />
Ukoliko se ne povećava greška kaže se da je rešenje<br />
stabilno<br />
47<br />
Bolja tačnost, manje LTEza dati korak postiže se boljom<br />
aproksimacijom izvoda<br />
48