1. ELEKTERVEO NÃÃDISTASE JA ARENGUD
1. ELEKTERVEO NÃÃDISTASE JA ARENGUD
1. ELEKTERVEO NÃÃDISTASE JA ARENGUD

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>1.</strong> <strong>ELEKTERVEO</strong> NÜÜDISTASE <strong>JA</strong> <strong>ARENGUD</strong><br />
<strong>1.</strong><strong>1.</strong> Elekterveoajamite ülevaade<br />
<strong>1.</strong><strong>1.</strong><strong>1.</strong> Veoajamite ehitus<br />
Veoajami ülesandeks on tagada sõiduki liikumiseks vajalik energiavahetus energiaallika (kontaktliini)<br />
ning sõiduki rataste vahel. Samuti on vaja tagada energiavoogude juhtimisega sõiduki nõutavad<br />
liikumisomadused - kiiruse juhtimine s.h. kiirendamine ja aeglustamine sh. pidurdamine. Ühe<br />
mootoriga veoajameid kasutatakse väiksematel rööbassõidukitel ning trollibussidel. Rongidel ja<br />
trammidel kasutatakse enamasti mitme veomootoriga veoajameid.<br />
Elektriajamid võivad olla erineva ehitusega. Komponentide hulk, tüübid sõltuvad pea-vooluahelast.<br />
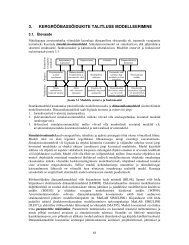
Järgnevalt on joonisel <strong>1.</strong>1 toodud alalisvoolutoitega elekterveoajami struktuur, kus juhtimissignaalid ja<br />
energiavood on näidatud nooltega.<br />
600 või 750 V<br />
Puldid, pedaalid, kontrollerid jms.<br />
Veoajami juhtsiin<br />
JUHT-<br />
ARVUTI<br />
LÜLITUS-,<br />
KAITSE- <strong>JA</strong><br />
LAADIMIS-<br />
APARAADID<br />
SISEND-<br />
FILTRID<br />
TOITE-<br />
MUUNDURID MOOTORID REDUKTORID<br />
T, ω<br />
Joonis <strong>1.</strong>1 Elektersõiduki veoajami struktuur<br />
Elektersõiduki veoajam koosneb ühest või mitmest veomootorist, mehaanilisest jõuülekandest -<br />
veoülekandest, juhtimis-, reguleerimis- ja kaitsesüsteemidest, sh. toitemuundurist - veomuundurist<br />
(juhitav pidurduslüliti koos pidurdustakisti või energiasalvestiga, lülitustalitluses muundur koos<br />
andurite ja juhtahelatega) ja selle juhtimissüsteemist, abiahelatest (takistid, reostaadid, kontaktorid,<br />
väljundparameetrite andurid jms.), kaitsesüsteemidest (filtrid, kaitselülitid, sulavkaitsmed,<br />
liigpingekaitse varistorid jms.). Lisaks nimetatutele on veoajamiga seotud sõiduki sisendahelad (sh.<br />
lülitus-, kaitse- ja laadimisaparaadid), sisendfiltrid ning andurid sisendparameetrite (voolu ja pinge)<br />
mõõtmiseks. Sõiduki mitmesugused mehaanilised süsteemid, nt pidurisüsteemid pole otseselt<br />
veoajami osaks, kuid nende juhtimine on tihedalt seotud ajami juhtimisega.<br />
<strong>1.</strong><strong>1.</strong>2. Arengusuunad<br />
Nüüdisveoajamite loojate tähelepanu on keskendunud eelkõige veoajamite kasuteguri suurendamisele<br />
ja kadude vähendamisele. Selle tulemusena väheneb transpordi energiatarve, mis tervikuna aitab kaasa<br />
keskkonnatingimuste parandamisele ning jätkusuutlikule arengule. Teiselt poolt esitatakse üha<br />
rangemaid nõudeid veoajamite talitluse ja juhtimise kvaliteedile. See on seotud nii reisijateveol<br />
nõutava ohutuse ja vajalike mugavuste tagamisega kui ka keskkonnanõuetega nagu elektromagnetilise<br />
kiirguse emissioon või müra vähendamisega.<br />
Elekterveoajamite rohkem kui 100-aastases arengus võib eristada kolme peamist arenguetappi e.<br />
kolme põlvkonda.<br />
<strong>1.</strong> Esimese põlvkonna ajamites kasutati jadaergutusega alalisvoolumootorite reostaatjuhtimist,<br />
kusjuures juhtimiseks vajalikke lülitusoperatsioone teostati relee-kontaktoraparatuuriga.<br />
2. Teise põlvkonna veoajamid võeti kasutusele pärast võimsate pooljuhtlülitite, türistoride, leiutamist,<br />
mil ajamite kiirust ja momenti hakati juhtima pulsilaiusmodulatsiooniga toitepinge regulaatorite<br />
abil. Sellistes süsteemides sai võimalikuks regulaatorite ja tagasisideahelate rakendamine ajamite<br />
veomootorite voolu aktiivseks juhtimiseks.<br />
14
3. Kolmandat e veoajamite nüüdispõlvkonda iseloomustab mikroprotsessorite ja infotehnoloogia<br />
laialdane rakendamine. Tarkvaraline juhtimine on oluliselt avardanud juhtimisvõimalusi.<br />
Jõupooljuhttehnika edasine areng on (lisaks üheoperatsioonilistele türistoridele) võimaldanud<br />
kasutusele võtta paindlikult juhitavad jõupooljuhtlülitid - GTOd, IGCTd ja IGBTd. Tänu<br />
paindlikule juhtimisele saab veoajamite momendi-kiirus-võimsusruumis nõutavad tehnilisi<br />
näitajaid saavutada eri tüüpi mootorite, muundurite ja muude komponentide kasutamisega. Seega<br />
on veoajamite loojatel palju rohkem valikuvõimalusi kui varasematel aastatel. Laia kasutust leiavad<br />
nt. mudelipõhised juhtimismeetodid. Samal ajal on karmistunud aga ka veoajamitele esitatavad<br />
tehnilised nõuded nii sõitjate ja keskkonnaohutuse kui ka töökindluse tagamiseks.<br />
Viimastel aastatel on avaldatud hulgaliselt leiutisi energiahalduse ja -salvestuse alal. Paranenud on<br />
tarkvaralised ja arvutustehnilised võimalused veoajamite uurimiseks arvutimudelite abil. See<br />
võimaldab täpsemaid mudeleid rakendada veoajamite projekteerimisel ja diagnostikas. Uued<br />
ergonoomilised ja arukad juhtimisliidesed võimaldavad parandada liiklusohutust ja juhtimise<br />
kvaliteeti, mis omakorda parandab sõidu- ja kasutusmugavust. Laieneb elektroonilise kommutaatoriga<br />
mootorite valik. Elektersõidukite veoajamite arengus oluliste tehnoloogiate arenguetapid on näidatud<br />
joonisel <strong>1.</strong>2 [SEK05].<br />
AASTA<br />
TEHNOLOOGIA<br />
TÖÖPÕHIMÕTE<br />
1975 1980 1985 1990 1995 2000<br />
Reostaatjuhtimine,<br />
Türistorimpulssmuundur<br />
GTO Impulssmuundur<br />
Pingevaheldid ja transistorimpulssmuundurid<br />
JÕUPOOLJUHT<br />
SEADISED<br />
<strong>JA</strong>HUTUS<br />
SCR<br />
(Üheoperatsiooniline<br />
türistor )<br />
RCT<br />
(Vastudioodiga<br />
türistor)<br />
Sund-õhkjahutus<br />
GTO<br />
(Suletav türistor)<br />
Vedelikjahutus<br />
(Sukel-jahutuspinnaga<br />
aurutus)<br />
(Sukelpinnata jahuti)<br />
IGBT<br />
(Isoleeritud paisuga<br />
bipolaartransistor)<br />
(Soojustoru)<br />
HV-IGBT<br />
(6,5kV IGBT)<br />
(Õõnesribi)<br />
JUHTIMIS-<br />
KOMPONENDID<br />
Mehaaniline<br />
Analoog<br />
(operatsioonivõimendid)<br />
ja<br />
diskreetkomponendid<br />
(TTL)<br />
Mikroprotsessorsüsteemid<br />
eraldi<br />
välisseadmetega<br />
Joonis <strong>1.</strong>2 Elekterveoajamite areng<br />
Mikrokontrollerid<br />
ja signaaliprotsessorid<br />
(DSP’d)<br />
sisseehitatud<br />
modulaatoriga<br />
FPGA,<br />
rakenduslikud<br />
kiibid,<br />
Probleemiks on jätkusuutliku arengu tagamine, sest uute tehnoloogiatega kaasnevad<br />
ühilduvusprobleemid. Seadmeid tootvad firmad pole sageli majanduslikult huvitatud vanade sõidukite<br />
ümberehitamisest.<br />
<strong>1.</strong><strong>1.</strong>3. Liigitus<br />
Kergrööbassõidukite veoajameid saab liigitada nii väliste tunnussuuruste nagu: toitepinge liigi ja<br />
väärtuse, arendatava võimsuse, sõiduki liikumiskiiruse järgi, kui ka ajami struktuuri ja ehituse järgi<br />
[JOL01] nagu: mootorite arvu ja tüübi, toitemuunduri või juhtseadme tüübi, mootori<br />
juhtimismeetodite [JOL02], energiahaldusmeetodite, kasutajaliidese tüübi ja lisafunktsioonide järgi.<br />
Veoajamite tähtsamad omadused on toodud tabelis <strong>1.</strong><strong>1.</strong><br />
15
Tabel <strong>1.</strong>1 Veoajamite välised omadused ja sisemine ehitus<br />
Omadus<br />
Veomootorite arv ja tüüp<br />
Struktuur<br />
Toitevoolu nimipinge,<br />
sagedus<br />
Veomootori töörežiim<br />
Juhtimissüsteem<br />
Muunduri või käiviti tüüp<br />
Muunduri ja regulaatori<br />
elemendid<br />
Elektrisüsteem<br />
Indikatsioon<br />
Juhtimisliidesed<br />
Veoajami elektrienergia<br />
salvestusvõimalused<br />
Veoajami gruppide vaheline<br />
kommunikatsioon<br />
Reverseeritavus<br />
Reserveerimisvõimalused<br />
(redundacy)<br />
Elektriliste<br />
pidurdustalitluste<br />
juhtimisvõimalused<br />
Veojõu ja kiiruse<br />
reguleerimisvõimalused<br />
Tarbitava ja tagastatava<br />
võimsuse reguleerimis- ja<br />
energiahaldusvõimalused<br />
Kasutusel olevad variandid<br />
Rööbassõidukitel kasutatakse mitut veomootorit. Uutes<br />
ajamites kasutatakse väiksema hinna ja odavamate<br />
hoolduskulude tõttu valdavalt mehaanilise<br />
kommutaatorita mootoreid<br />
Individuaal-, ühis- või kombineeritud ajam<br />
Alalis- või vahelduvvoolutoitega või<br />
mitmesüsteemilised<br />
Ühe, kahe või nelja kvadrandiline juhtimine<br />
Mehaaniline-kontrollerjuhtimine (pneumokontrollerid),<br />
relee-kontaktorjuhtimine,<br />
servomootorigareostaatjuhtimine,<br />
analoog- või digitaalelektroonikaga<br />
ja mikroprotsessor-juhtimine<br />
Sildalaldi, alalispinge impulssmuundur, vaheldi,<br />
reostaatkiirendi, reostaat-käivituskontroller,<br />
mootorite rühmituskontroller jms.<br />
Jõupooljuhtlülitid: SCR, GTO, IGCT, IGBT<br />
ja kontaktor-lülitusaparatuur või kontaktkontrollerid<br />
(käivitus, talitlusviisid sh. pidurdus ja reverseerimine).<br />
Nüüdisaegsete trammiajamite impulssmuundurites on<br />
alalispingetel 600 V ja 750 V kasutusel IGBT moodulid<br />
ja poolsildlülitused<br />
Sõiduki kerest isoleeritud või sõiduki kerega ühendatud<br />
(maandatud)<br />
Signaallambid, valgusdioodid, kuvar, jms.<br />
Surunupud, klahvistik, puutetundlik ekraan, pedaalid,<br />
hoovad<br />
Sõitmiseks salvestatud energiaga,<br />
pidurdusenergia salvestusega energia paremaks<br />
kasutamiseks,<br />
energiasalvestusega depoos manööverdamiseks,<br />
energiasalvestusega abiseadmete toiteks või<br />
salvestusvõimaluseta<br />
Vagunite ja ajamigruppide seadesuuruste astmeline<br />
edastamine elektriliste signaalidega (releejuhtimine),<br />
signaalide edastamine pneumo-süsteemidega (rongidel),<br />
tööparameetrite nt. momendi ja kiiruse juhtimine ühtse<br />
arvutivõrgu kaudu<br />
Täielik või osaline reverseeritavus (piiratud juhtimisega<br />
tagurdamine).<br />
Võimalused ajami töövõime osaliseks säilitamiseks<br />
veomootori, juhtimis- või toitesüsteemi rikete korral<br />
Elektrilise pidurduse sõltumatu juhtimine või elektriline<br />
pidurduse juhtimine mehaaniliste piduritega<br />
kooskõlastatult<br />
Kiiruse-momendi tunnusjooned, maksimaalvõimsus<br />
erinevatel kiirustel, erinevates töörežiimides jms.<br />
Võrku tagastatava võimsuse reguleerimisega,<br />
kombineeritud rekuperatiivpidurduse juhtimisega, või<br />
ainult elektrodünaamilise pidurduse kasutamine kütteks<br />
vms.<br />
Lisaks tabelis <strong>1.</strong>1 toodud välistele omadustele sõltub jõuahela struktuur juhtimisobjektist e. sõidukist<br />
sh., veomootoritest (ühe või mitme mootori juhtimiseks), kasutatavatest jõu-elektriahela<br />
komponentidest, juhtimissüsteemi komponentidest ja tarkvarast.<br />
16
<strong>1.</strong><strong>1.</strong>4. Juhtimismeetodid ja dünaamika<br />
Kasutatavad juhtimismeetodid sõltuvad otseselt skeemi struktuurist ja komponentidest. Jõuahela<br />
ehitusest ja komponentide valikust sõltuvad ka kasutatavad töörežiimid ja veoajami funktsioonid<br />
(omadused), nt elektriline pidurdus, pidurdusenergia tagastamine, töökiiruste vahemik jms.<br />
Mitme alusvankriga mitmemootorilise rööbassõiduki veoajami dünaamiline talitlus on keerukas<br />
protsess, mille käigus rataste veomomendid pidevalt ümber jagunevad, kusjuures pidevalt on oht<br />
mitmesuguste võnkeliste protsesside ja veojõu ebastabiilsuse tekkeks. Veomootorite ja<br />
reguleerimisahelate tehniliste näitajate hajumine, rataste ebaühtlane kulumine ja libisemine rööbastel,<br />
erinev koormus sõiduki eri osades jt. mõjurid põhjustavad võimsuste ja momentide ebaühtlast<br />
jagunemist rataste vahel ning sellest tingituna rataste pöörlemiskiiruse erinevust. See omakorda<br />
soodustab rataste kulumist ning halvendab veoajami talitluse kvaliteeti.<br />
Ajami kindel talitlus (s.h. elektriline ja mehaaniline stabiilsus) on eriti oluline pidurdusprotsessis.<br />
Liiklusohutuse tagamiseks on minimaalne aeglustus ja maksimaalne pidurdustee pikkus standardite ja<br />
eeskirjadega [BOStrab] [RTL641] määratud. Nende nõuete täitmine on jäätumisest või langenud<br />
lehtedest põhjustatud libeda rööbastee puhul raske. Rataste libisemise vältimiseks on rööbassõidukil<br />
vajalik nii rataste libisemisvastane süsteem pidurdamisel kui ka rataste veojõu juhtimine kiirendamisel<br />
ja ühtlasel liikumisel. Rööbastee kurvide läbimisel tekivad sise- ja väliskurvi läbivate rataste kiiruste<br />
erinevuse ning alusvankrite pööramise probleemid.<br />
<strong>1.</strong><strong>1.</strong>5. Veomootorite toitepinge ja voolu reguleerimise viisid<br />
Pinge reguleerimise meetodid on seotud kasutatava toitesüsteemiga. Ainult ühefaasilisest vahelduvvoolu<br />
kontaktvõrgust toidetavaid kergrööbassõidukid sh. trammid on vähelevinud, seetõttu neid meetodeid<br />
selles töös pikemalt ei käsitleta. Üha enam levivad alalisvoolu vahelüliga ja mitmesüsteemilise toitega<br />
kergrööbassõidukid, mis on kasutatavad lisaks 600 V või 750 V alalisvoolutoitele ka ühefaasilise<br />
keskpingelise vahelduvvoolutoitega. Joonisel <strong>1.</strong>3 on toodud mitmesugused pinge reguleerimise viisid<br />
erinevate toitepingete ja mootoritüüpide korral.<br />
Nüüdisaegsed impulssreguleerimisega alalisvooluajamid või sagedusjuhtimisega vahelduvvooluajamid<br />
põhinevad valdavalt alalisvoolulüliga transistor-veomuunduritel.<br />
Veomootorite toite<br />
juhtimismeetodid<br />
Alalisvoolumootorite<br />
juhtimine<br />
Pidevjuhtimine<br />
Lülitusmooduses<br />
juhtimine<br />
Vahelduvvoolumootorite<br />
lülitusmooduses<br />
sagedusjuhtimine<br />
Muud meetodid<br />
Faasijuhtimise,<br />
trafoga reguleerimise<br />
või faasirootoriga<br />
mootorite,<br />
tsüklokonverterite,<br />
resonantsmuundurite<br />
jms kasutamine<br />
Elektromehaaniline<br />
juhtimine<br />
Kandevsagedusega<br />
juhtimine<br />
Kandevsageduseta<br />
juhtimine<br />
Skalaar<br />
juhtimine<br />
Vektor<br />
juhtimine<br />
Siinusmodulatsiooniga<br />
Nelinurkpingega<br />
Pinge<br />
vektormodulatsiooniga<br />
Pinge ja<br />
voolu<br />
juhtimine<br />
Magnetvoo<br />
juhtimine<br />
Momendi<br />
juhtimine<br />
(sh. DTC)<br />
Joonis <strong>1.</strong>3. Mootorite toitepinge ja voolu reguleerimise võimalused<br />
Nüüdisaegsetes ajamites kasutatakse alalisvoolu kontaktvõrgus alalis- või vahelduvvoolu veomootoreid.<br />
Alalisvoolu-veomootorite korral on vahelduvvoolu kontaktvõrgus rakendatavad trafoga reguleerimine<br />
või reguleeritavad alaldid (faasijuhtimine). Alalisvoolu-veomootorite toitepinge impulssideta<br />
pidevjuhtimine (elektromehaaniline reguleerimine) takistite astmelise lülitamisega või pidevatoimeline<br />
reguleerimine kiirendusreostaadi abil on siirderežiimides väikese kasuteguriga takistusastmetel eralduva<br />
võimsuse tõttu. Samuti pole see juhtimisviis rakendatav vahelduvvoolu-veomootorite puhul.<br />
17
Veoajamite esimesed impulssmuundurid valmistati üheoperatsiooniliste türistoride baasil [KAR95].<br />
Sarnaseid lülitusi on veel tänapäevalgi paljudes sõidukites kasutusel, s.h. 3 kV alalisvoolutoite ja<br />
alalisvoolumootoritega veoajamites.<br />
+<br />
Sisend<br />
+<br />
−<br />
Joonis <strong>1.</strong>4. Türistor-pingehakkuri skeem<br />
Joonisel <strong>1.</strong>4 toodud üheoperatsiooniliste türistoridega impulssmuunduril (trollibuss Škoda 14tr) on<br />
järgmised puudused:<br />
Väljund<br />
−<br />
<strong>1.</strong> Mitme aeglase toimega türistori paralleellülitus on keerukas ja nõuab energiakadusid põhjustavaid<br />
lisafiltreid (L2, L3, L5.2)<br />
2. Liigpingeid alandavad RC ahelad põhjustavad energiakadusid.<br />
3. Peaahela türistoride (V7, V8) sulgemiseks on vajalik türistori (V6), kondensaatori (C9),<br />
vabavooludioodi (V5) ja takistiga (R11) kommutatsiooniahel. Kommutatsiooniahela tõttu pole<br />
võimalik kasutada kõrgeid lülitussagedusi, mistõttu vajatakse suuremaid filtreid. Lisaprobleeme<br />
tekitab veomootori pinge pulsatsioon. Sulgemisahela juhtimiseks, kaitseks ja juhtimissignaalide<br />
eraldamiseks vajatakse keerukat juhtimislülitust ja juhtimissüsteemi.<br />
4. Vajadus kasutada eraldi vabavooludioode jõupooljuhtlüliti ahelas (V9) ja koormuse ahelas (V13).<br />
Nüüdisaegsetes pooljuhtlülitites on need moodulitesse sisseehitatud (nt. RCT jt.)<br />
Nüüdisaegsetes muundurites joonisel <strong>1.</strong>4 toodud skeemilahendust ei kasutata, sest on võimalik kasutada<br />
oluliselt kompaktsemaid, kiiremaid ja säästlikumaid transistormooduleid. Kiiretoimeliste<br />
jõupooljuhtlülitite olemasolu ja parema pingekvaliteedi tõttu eelistatakse ajamites ja juhitavates alaldites<br />
pulsilaiusjuhtimist.<br />
Vahelduvvoolu-veomootorite toiteks kasutatakse sildlülitustel põhinevaid vaheldeid. Veomuundurite<br />
jõuplokid koostatakse üldjuhul sarjaviisiliselt toodetavatest jõupooljuhtseadistest (joonis <strong>1.</strong>5) või<br />
arukatest moodulitest. Sama vaheldi jõuosaga võidakse sõltuvalt veomootoritest kasutatakse erinevaid<br />
vahelduv-väljundpingeid ja juhtimismeetodeid nt. pingevektori modulatsiooni.<br />
Uurimist vajavateks probleemideks on:<br />
<strong>1.</strong> Komponentide lülitussageduse suurendamisega kaasnevad probleemid sh. jõupooljuhtlülituste 3D<br />
disaini, elektromagnetilise ühilduvuse ja pikkade kaablite probleemid. Toodud riistvaralisi<br />
probleeme tuleb püüda lahendada ka tarkvaraliselt nt. modulatsioonisageduste ja juhtimismeetodite<br />
valikuga<br />
2. Muunduri transistoride ja veomootorite kaitsmine rikete ja väärtalitluste korral<br />
3. Tagasiside ja mõõteahelate häirekindluse tagamine<br />
4. Paindlikult juhitavad ja suure kasuteguriga muundurid, mida saab kasutada eri tüüpi mootorite<br />
toiteks<br />
5. Elektromagnetilise ühilduvusega seonduvad probleemid on tihedalt seotud muunduri<br />
juhtimismeetoditega nagu nt. modulatsiooniga, pooljuhtseadiste poolt võimaldatava lülitusviiside ja<br />
lülitussagedusega<br />
18
6. Uute jõupooljuhtseadiste rakendamine ajamite muundurites (6,5kV IGBT’d, ränikarbiidil põhinevad<br />
ülikiired vastudioodid jms.)<br />
<strong>1.</strong><strong>1.</strong>6. Levinumad jõupooljuhtseadiste moodulite lülitused<br />
Suurema võimsusega ajamites sh. trammiajamites kasutatakse (nii vaheldites kui ka<br />
alalisvoolumuundurites) mitmetest jõutransistoridest ja vabavooludioodidest koosnevaid mooduleid<br />
(joonis <strong>1.</strong>5). See võimaldab muuta jõuplokki kompaktsemaks ja alalisvoolu ühendussiinide (DC-bus)<br />
konstruktsiooni lihtsamaks. Vajaliku väljundvoolu võimaldamiseks sisaldavad need moodulid ka<br />
pooljuhtseadiste rööplülitusi [TUR01].<br />
a) M1C<br />
pooljuhtlüliti<br />
(moodul)<br />
b) M1F<br />
vabavooludioodiga<br />
pooljuhtlülitid<br />
c) M2C kahe<br />
pooljuhtlüliga<br />
poolsildlülitus<br />
Joonis <strong>1.</strong>5 Trammide veoajamite impulssmuundurites kasutatavaid ja<br />
saritootmises olevaid jõutransistormoodulite lülitusi<br />
Veomuundurite sildlülitustes (nii alalisvoolu- kui ka vahelduvvooluajamites) kasutatakse samuti<br />
valdavalt poolsildlülituses jõumooduleid. Eritasemeliste alalispingete puhul kasutatakse pinget<br />
alandavaid või suurendavaid alalispingemuundureid. Lisaks kasutatakse alalisvoolulüli pinge<br />
piiramiseks pidurdusmoodulit lülituses M1F. See on otstarbekas ühesuunalise energiavoo ja<br />
reverseerimist mittevajava koormuse korral. Kahesuunalise energiavoo puhul, nt. energiasalvestite<br />
juhtimiseks on otstarbekas kasutada poolsildlülitust M2C (joonis <strong>1.</strong>5,c) kahesuunalise<br />
impulssmuunduri lülituses. M2C lülitus sobib kasutamiseks ka ühesuunalise energiavooga, kuid<br />
reverseerimist vajava koormuse korral nt. alalisvoolu veomootorite ergutusmähiste toite juhtimisel.<br />
Kolm poolsildlülitust ehk M2C moodustavad ühe kolmefaasilise väljundiga ja kuue juhitava ventiiliga<br />
kolmefaasilise sildlülituse B6C. Muundurite sildlülitused sobivad seetõttu nii alalis- kui ka<br />
vahelduvvoolumootorite toiteks kuid eeldavad sobivat juhtimisplokki ja juhtimisahelat.<br />
Poolsildlülituste kasutamine alalispinge muundurites eeldab pooljuhtseadiste sõltumatut juhtimist<br />
võimaldavat juhtimisahelat sobivate blokeeringutega. Vaheldites kasutatakse poolsildlülitust<br />
peamiselt vastastaktlülituses, mistõttu juhtahela ülesandeks on tekitada lülitusviivitus.<br />
Firma Semikron SKiiP-sarja [TUR01] kuuluvates arukates jõumoodulites (joonis <strong>1.</strong>6) on nõutava<br />
voolutugevuse saavutamiseks mitu transistori ühendatud rööbiti. Rööplülituse juhtimiseks kasutatakse<br />
ühist tüürlülitust. Arukas juhtimislülitus tagab transistoride tüürahelate juhtimis- ja<br />
tagasisidesignaalide galvaanilise eraldatuse, sekundaarpoole ja vooluandurite isoleeritud toite ning<br />
kaitseb jõumooduleid lühiste ja ülekoormuse vastu. Rööplülituses jõumooduli kaitseks kasutatakse nii<br />
kollektor-emitterpinge jälgimist (päripinge jälgimist sisselülitatud olekus) kui ka mitme vooluanduri<br />
poolt mõõdetud voolude jälgimist rööpahelates. Väljundvoolu tagasisidesignaal mikroprotsessor<br />
juhtimissüsteemile moodustatakse mitme vooluanduri signaali summeerimisega. Liigvoolukaitse<br />
kasutamisel on transistormoodulite kaitse sõltumatu lülitite avanemiskarakteristikutest ja<br />
temperatuurist.<br />
19
Muunduri juhtimisplokk<br />
Optosisend<br />
TOP<br />
Optosisend<br />
BOT<br />
Blokaatori<br />
väljund<br />
Omatoite<br />
kontroll<br />
Analoog<br />
väljund<br />
Termiline kaitse<br />
ja temperatuuri<br />
analoogväljund<br />
Impulsside<br />
formeerimine<br />
Blokeeringud<br />
Liigvoolukaitse<br />
lühikeste<br />
impulsside<br />
allasurumine<br />
Kiiretoimeline<br />
väljalülitamine<br />
lühikeste<br />
impulsside<br />
allasurumine<br />
Eraldus<br />
(trafo/optron)<br />
Eraldus<br />
(trafo/optron)<br />
Toite eraldus<br />
primaarmähis<br />
Eraldus<br />
(trafo/optron)<br />
Eraldus<br />
(trafo/optron)<br />
Signaalide<br />
liitmine<br />
Uce<br />
jälgimine<br />
Triger<br />
TOP<br />
0<br />
jõumoodul<br />
sekundaarmähis<br />
sekundaarmähis<br />
Uce<br />
jälgimine<br />
Triger<br />
BOT<br />
Juhtimisahel<br />
υDCB<br />
VGE<br />
VGE<br />
Ud1<br />
TOP<br />
Ud2<br />
Id2<br />
BOT<br />
Joonis <strong>1.</strong>6. Poolsildlülituses aruka jõumooduli SKiiPPACK lihtsustatud struktuur<br />
Täiendavaks kaitseks on lisatud sisendimpulsside moodustamine koos blokeeringute lülitusviivitustega<br />
ja lühikeste impulsside (< 750 ns) allasurumine lülituskadude vähendamiseks. Samuti sisalduvad<br />
arukates jõumoodulites kaitse- ja jälgimisfunktsioonid, nagu näiteks:<br />
<strong>1.</strong> omatoite jälgimine ja kaitse toiteahela alapingete eest,<br />
2. liigtemperatuuri kaitse integreeritud temperatuuriandurite abil,<br />
3. lühisekaitse vooluandurite ja transistoride pinge mõõtmisega,<br />
4. liigvoolukaitse voolu mõõtmisega.<br />
Pooljuht-impulssmuundurites toimub veomootorite voolu reguleerimine ja piiramine pooljuhtlülitite ja<br />
kiiretoimelise tagasisidega regulaatoritega. Tänu nüüdisaegsetele komponentidele on<br />
impulssreguleerimine ka odavam ja töökindlam kui reostaat-kontaktorjuhtimisega süsteemid, milles<br />
lülituselementide hulk on suur ja voolu piiramine toimub passiivkomponentide aeglase lülitamisega.<br />
Impulssjuhtimine eeldab impulsspinget taluvaid veomootoreid, kuid võimaldab veomootorite voolu<br />
täpsemalt piirata ja seega ajamit kvaliteetsemalt juhtida võrreldes relee-kontaktorjuhtimisega.<br />
Poolsildlülitused võimaldavad koostada universaalseid muundureid mille skeem alalisvoolutoitega,<br />
vahelduvvoolutoitega, alalisvoolumootoritega või vahelduvvoolumootoritega jõuahelates<br />
põhimõtteliselt ei erine.<br />
<strong>1.</strong><strong>1.</strong>7. Kesk- ja kõrgepingelised ajamilülitused<br />
Transistoride ja kondensaatorite puhul on kriitiliseks tehniliseks näitajaks tööpinge. Kuigi IGBT<br />
transistoride lülitusomadused on paremad kasutatakse kõrgepingelistes muundurites sobivate<br />
transistoride puudumisel ka GTO türistore ja/või komponentide jadalülitusi. Jadalülituse puuduseks on<br />
omakorda komponentide suur arv, keerukas pingete ühtlustamine ja suurema komponentide arvuga<br />
kaasnev väiksem töökindlus. Kesk- ja kõrgepingelised süsteemid on kasutusel olnud juba ligi 100<br />
aastat. Esimesed 1,5 kV elekterveovõrgud ehitati 1900 algusaastatel ja esimesed 3 kV võrgud<br />
1930ndatel. Liinipinge oli sõiduki abimootoritele liiga kõrge, mistõttu abiseadmed olid suured ja<br />
rasked [HIL94] [KEM89]. Kõrgemapingelistes ajamilülitustes on seniajani palju tehnilisi probleeme.<br />
Kuni 1500 V toitepingega nüüdisveomuundurites ja -abitoitemuundurites kasutatakse IGBT<br />
transistoridel põhinevaid muundureid. Kõrgematel pingetel kasutatakse transistoride jadalülitusi koos<br />
pingeühtlustusahelatega [BOD99] ja spetsiaalseid veomootoreid. Jõutransistoride tootjate poolt on<br />
välja töötatud uued 6,5 kV IGBT moodulid, mis lähitulevikus muutuvad kasutatavaks raudtee<br />
veosüsteemides [BOD01]. Kõrgepingelistes muundurite jaoks vajatakse lisaks transistoridele ka<br />
kõrgepingeliste kondensaatorpatareide, kaitseaparaatide jt. komponente. Kuna jõuahela komponentide<br />
tehnilised näitajad on pidevalt täiustunud, võib peagi oodata ka kõrgepingeliste ajamite<br />
terviklahenduste ilmumist turule, sh ka 3 kV nimipingega alalisvoolu toitesüsteemile sobivaid<br />
muunduriplokke. Sildlülitustest moodustatud jadalülitusi kasutatakse kõrgematel pingetel (1,5 kV või<br />
20
kõrgemal alalis-toitepingel), et vähendada impulsspinge amplituudväätust ja fronti veomootorite<br />
mähistel (joonis <strong>1.</strong>7, a).<br />
3000 V<br />
1500 V<br />
M<br />
3~<br />
3000 V<br />
M<br />
3~<br />
a) Keskpunkti ja kolmetasemeliste<br />
väljundimpulssidega veomuundur Onix 3000,<br />
Alstom 1998<br />
b) Topelt-tähtühenduses mootori toitemuundurite<br />
jadalülitus rongil Škoda Electric Multiple Unit<br />
471<br />
Joonis <strong>1.</strong>7 Kõrgematel toitepingetel rakendatavaid transistorvaheldeid<br />
Mitmetasemelise väljund-pingega muundurid (joonis <strong>1.</strong>7, a) võimaldavad lülitamisega moodustada<br />
enam kui kahte väljundpinge taset ning seega paremat väljundpinge kvaliteeti (väiksem dU/dt). Topelt<br />
tähtühenduses mootoris on mitu isoleeritud staatorimähist (joonis <strong>1.</strong>7, b), see võimaldab vähendada<br />
mähistele antavate toitepingeimpulsside amplituudväärtust. Toodud lülituste juhtimine eeldab<br />
spetsiaalseid juhtimisahelaid ja ühtset juhtimissüsteemi (ühist modulaatorit) kõigile jadalülituses<br />
muunduritele koos alalispinge juhtimisega sõidul ja pidurdusel. Edasist uurimist vajavateks<br />
probleemideks (mida selles töös ei käsitleta) on mitmetasemeliste muundurite juhtimine, pingete<br />
aktiivne piiramine ja ühtlustamine muundurite alalisvoolulülides ja sujuva ning jäiga<br />
kommutatsiooniga muundurite optimaalse kasutusala määratlemine. Sujuva kommutatsiooniga<br />
muundurid võimaldavad kõrgeid lülitussagedusi. Nende puuduseks on keerukus ja võimalikud kaod<br />
lisaahelates.<br />
<strong>1.</strong>2. Veoajamite toitesüsteemid<br />
Eri tüüpi sõidukite toitesüsteemide kohta kehtivad erinevad standardid. Nüüdisaegsete rööbassõidukite<br />
elekterveoajamite toiteks kasutatakse kolme põhilist tüüpi toitesüsteemi: vahelduvvoolu-võrgutoide<br />
kontaktliini kaudu, alalisvoolu-võrgutoide kontaktliini kaudu või toide sõidukil paiknevast<br />
diiselgeneraatorist. Joonisel <strong>1.</strong>8 on toodud veoajami toiteahelad erinevate toitesüsteemide korral.<br />
Vahelduvvoolu<br />
toitesüsteem<br />
1 faasiline<br />
vahelduvpinge<br />
Kontaktliin<br />
Alalisvoolu<br />
toitesüsteem<br />
Alalispinge<br />
Kontaktliin<br />
Diisel-elektriline<br />
süsteem<br />
M 3~<br />
Topelttäht<br />
Diiselmootor<br />
Generaator<br />
Reguleeritav<br />
sisendalaldi<br />
Sisendlülitid,<br />
laadimistakisti<br />
Alaldi<br />
Juhtimissüsteem<br />
Etteandesignaalid<br />
Tagasisided<br />
Veomuundur<br />
Alalisvoolulüli<br />
Sõiduki<br />
andmesidesiin<br />
Veomuundur<br />
Salvesti<br />
Abisüsteemide<br />
juhtimisahelad<br />
Veomootor<br />
Veomootor<br />
Veomootor<br />
Veomootor<br />
Joonis <strong>1.</strong>8 Veomuunduritega veoajami toiteahelad erinevates toitesüsteemides<br />
Veomuunduri tüüp sõltub nii kasutatavast toitesüsteemist kui ka mootori tüübist. Nüüdisaegsed<br />
veomuundurid on valdavalt pingemuundurid (voltage source converters), milles kasutatakse<br />
alalisvoolulüli. Kõigil kolmel juhul on kasutusel alaldid, alalisvoolutoite korral paiknevad alaldid<br />
21
alajaamades vahelduvvoolutoite sh. diiselgeneraatorite puhul sõidukites. Alalisvoolulüli pinge<br />
valitakse vastavalt veomootoritele toitepingele. Alalisvoolu toitesüsteemides on tehniliselt lihtsam<br />
kasutada kontaktliini pinget stabiliseerivaid energiasalvestus-alajaamu. Alalisvoolusüsteemide<br />
ühendamiseks vahelduvvooluvõrguga saab kasutada mitmesuunalise energiavooga<br />
veoalajaamu [TSE98]. Mitmesuunalise energiavooga veoalajaamade kombineerimine<br />
salvestusalajaamadega võimaldab vähendada tarbitavat maksimumvõimsust kiirendamisel ja veelgi<br />
tõhusamalt kasutada rekuperatiivpidurdust.<br />
Järjest olulisemaks muutub erinevate toitesüsteemide sobitamine veoajamitega, et elektersõidukit<br />
saaks toita eri pingega kontaktliinidest. Universaalsuse ja paindlikkuse nõuded laienevad ka ajamites<br />
kasutatavate muundurite riistvarale, mida peaks võimalusel saama kasutada eri tüüpi mootorite toiteks.<br />
Sellest vajadusest lähtudes on ka käesolevas töös välja töötatud uudne veomuundur, mille riistvara<br />
saab kasutada trammidel nii alalisvoolu kui ka vahelduvvoolu veomootoritega. Leiutis on kaitstud<br />
kasuliku mudeliga [EE332U].<br />
Uurimist vajavateks probleemideks seoses toitesüsteemidega on muunduri väljundpinge ja ajami<br />
võimsuse optimaalne juhtimine rekuperatiivpidurdusel.<br />
<strong>1.</strong>2.<strong>1.</strong> Alalisvoolu toitesüsteemid<br />
Alalisvoolu kontaktliinitoitega sõidukites sisendmuundur puudub ja veomuunduri alalisvoolulüli<br />
lülitatakse kontaktvõrku läbi sisendfiltri. Veomuunduri alalisvoolulüli stabiilse pinge hoidmine on<br />
raskendatud liinipinge kõikumise tõttu. Veoajamite juhtimine on liinipinge muutumisest tingitud<br />
häiringute tõttu keerukas. Vanades alalisvoolu veosüsteemides kasutati veomootorite otsetoidet<br />
alalisvooluvõrgust. See süsteem on lihtne, kuid vajab suurema ristlõikega elektrijuhte ja toitealajaamade<br />
tihedat paigutust. Kõrgemapingelised süsteemid võimaldavad parandada kasutegurit, suurendada<br />
edastatavat võimsust, vähendada kadusid liinis ja suurendada alajaamade vahekaugusi. Sõidukis<br />
kasutatav kõrgemapingeline süsteem eeldab raskeid madalasagedustrafosid, kallimaid keskpinge<br />
impulss-alaldeid [BER00] või spetsiaalseid mitme isoleeritud staatorimähisega veomootoreid [STE99].<br />
Kõrgemate pingete kasutuselevõtuga kaasneb vajadus kõrgema toitepingega pardaseadmete ja<br />
sobivate abitoitemuundurite järele, sest lisaks kõrgepingeahelatele on vajalikud ka madal- ja<br />
väikepingeahelad. Kõrgepingelise veotoitesüsteemi puhul kasutatakse tänapäeval madalapingelise<br />
abitoitesüsteemi jaoks vastavaid DC/DC abitoitemuundureid. Rööbassõidukil paiknevate<br />
jõuelektroonikaseadmete ja muundurite kohta kehtib standard [EN 50207], mis kehtib trammidele,<br />
reisivagunitele, järelvagunitele ja laieneb niipalju kui võimalik ka kõigile teistele elektersõidukite sh.<br />
trollibussidele. Euroopa elekterveosüsteemides kasutatavad pingesüsteemid on määratud<br />
standardiga [EN 50163], mis käsitleb liinipinget elekterveovõrgus normaal tööolukorras ja pingete<br />
lühiajaliselt lubatavaid piirväärtusi. Linnatranspordis (trammid ja metrood) on peamiselt kasutusel<br />
alalisvoolu toitesüsteemid (vt tabel <strong>1.</strong>2).<br />
Tabel <strong>1.</strong>2 Rööbassõidukitel sh. trammidel kasutatavad alalisvoolusüsteemid<br />
Nimipinge<br />
sõidukitel<br />
Kasutus<br />
600 V Trammid ja<br />
metrood<br />
Kasutuspiirkonnad ja põhiomadused<br />
Kasutatakse laialdaselt trammide ja trollibusside<br />
toitesüsteemides. Alalisvooluajamite puhul kasutatakse<br />
impulssmuundureid ja vahelduvvooluajamite puhul<br />
vaheldeid. Vanades 600 V ajamites kasutatakse<br />
reostaatjuhtimist. Rekuperatiivpidurdusel, s.t. energia<br />
regenereerimisel lubatakse pinge kasvamist kontaktliinis<br />
kuni 720 V. Lühiajalised ülepinged võivad olla kuni<br />
pingega 800 V. Selle pingepiirkonna jaoks on sobivad<br />
1200 V lubatava pingega IGBT transistormoodulid ja<br />
paarikaupa jadamisi lülitatud 400 V<br />
elektrolüütkondensaatorid.<br />
22
Nimipinge<br />
sõidukitel<br />
Kasutus<br />
750 V Trammid ja<br />
metrood<br />
1200 V Kergrongid jt.<br />
kerged rööbassõidukid<br />
1500 V Kergrongid jt.<br />
kerged rööbassõidukid<br />
3000 V Rongid, kergrongid<br />
jt. kerged<br />
rööbassõidukid<br />
Kasutuspiirkonnad ja põhiomadused<br />
Kasutatakse laialdaselt trammide uutes toitesüsteemides.<br />
Valdavalt kasutatakse selle pinge puhul vaheldist<br />
toidetavaid vahelduvvoolumootoreid. Alalispinge lubatav<br />
maksimaalväärtus on 950 V. Selle pingepiirkonna jaoks<br />
sobivad samuti 1200 V lubatava pingega IGBT<br />
transistormoodulid ja 475 V või suuremale pingele<br />
ettenähtud elektrolüütkondensaatorite jadaühendused.<br />
Kuubas, Hispaanias (Sóller’i raudteel), Hamburgis<br />
(kontakt-rööpaga S-bahn), Praegu on 1200V süsteem<br />
vähelevinud, kasutati ka Eesti Elektriraudteel aastatel<br />
1924-1941 ja 1946-1958 [LÕH04].<br />
Kasutatakse Prantsuse, Hollandi, Hispaania, Šveitsi,<br />
Portugali ja Jaapani raudteedel. Kirjandusest võib leida<br />
võrdlevaid analüüse 750V [AÇI04] ja 1200V ning 3000V<br />
[PHA00] süsteemidega.<br />
Kasutatakse Belgias, Itaalias, Hispaanias, Poolas, Tšehhi<br />
vabariigis, Slovakkias, Serbias, Horvaatias, Sloveenias,<br />
Venemaal, Ukrainas ning ka Eestis ja Lätis. Peale<br />
Euroopa veel Lõuna aafrika vabariigis, Brasiilias, Tšiili<br />
Vabariigis ja Indias. Alalispinge lubatav<br />
maksimaalväärtus on 4200 V. Seniajani kasutati<br />
muundurites türistore, nüüd on tekkimas võimalus<br />
kasutusele võtta uued 6,5 kV pinget taluvad IGBT’d.<br />
Elektersõidukis võivad olla kasutusel erinevad pinged. Näiteks võidakse depoohoonete sees kasutada<br />
ohutuse tagamiseks madalamat pinget. Väiksema, ohutuma pingega alalisvoolu kontaktvõrk (110V) on<br />
seni kasutusel tööstuslike erirakenduste puhul ja nt. kaevandusrongide toiteks.<br />
Kui sõidukiga sõidetakse erineva toitepingega rööbastee lõikudel kasutatakse mitmesüsteemilisi<br />
elekterveoajameid, mida saab ümber lülitada erinevatele toitepingetele. Sellise süsteemi sisendahela<br />
elektroonikakomponendid peavad olema arvestatud tööks suurimal võimalikul toitepingel.<br />
<strong>1.</strong>2.2. Vahelduvvoolu toitesüsteemid<br />
Rööbassõidukitel kasutatakse lisaks alalisvoolusüsteemidele ka vahelduvvoolu toitesüsteeme.<br />
Ühilduvus vahelduvvoolusüsteemidega on oluline ka multisüsteemsetes trammides võimaldamaks<br />
trammil liikuda vahelduvvoolutoitega raudteelõigul. Madalsagedusliku trafoga süsteemid on üldjuhul<br />
lihtsa ehitusega ja võimaldavad veomuundurites kasutada odavaid jõupooljuhtseadiseid. Suure<br />
võimsuse ja kõrge pinge tõttu on vahelduvvoolusüsteemidel palju puudusi, nt suuremad häired<br />
keskkonda, kasutatavate trafode suur mass, ebaühtlaselt koormatud elektrivõrgu faasid, sobiva<br />
tööpingega jõupooljuhtmuundurite puudumine jms.<br />
Ülimadalsageduslik vahelduvvoolusüsteem võimaldab ilma alaldita toita vahelduvvoolu<br />
kommutaatormootoreid e. universaalmootoreid. Kommutaator-mootoreid s.h. jadaergutusega<br />
alalisvoolu-veomootoreid on võimalik toita vahelduvvooluvõrgust, sest voolusuuna üheaegsel<br />
muutumisel nii staatoris kui ka rootoris ei muutu masina momendi suund. Tavapärasest madalam<br />
toitevõrgu sagedus võeti kasutusele elektrimasina talitluse parandamiseks ja mehaaniliste pingete<br />
vähendamiseks. Paljud Euroopa maad rakendasid ühefaasilist 15 kV (varem 6 kV ja 7,5 kV)<br />
vahelduvvoolu toitesüsteemi, mille sageduseks oli 16⅔ Hz (USA’s vastavalt 20 Hz). Veomootoreid<br />
toideti ümberlülitatavate mähistega trafodest. Trafoga reguleerimine on suurema kasuteguriga<br />
võrreldes alalisvoolusüsteemides kasutatud takistusjuhtimisega. Pardaseadme abitoitevõrku toidetakse<br />
peatrafo eraldi mähisest, mistõttu abiseadmeid on võrreldes vanades 1,5 kV ja 3 kV<br />
alalisvoolusüsteemides kasutatud seadmetega kompaktsed ja kerged. Ülimadalsageduslik<br />
vahelduvvoolusüsteem on tänapäeval kasutusel Saksamaal, Austrias, Šveitsis, Taanis, Norras ja<br />
Rootsis.<br />
23
Esimesed katsed 50Hz standardsagedusega ühefaasilise vahelduvvoolu kontaktvõrgu<br />
kasutamiseks tehti Ungaris 1930’ndantel. Seoses sobivate alaldite väljatöötamisega 1950’ndatel<br />
hakkas see süsteem üha enam levima. Algul olid kasutusel elavhõbealaldid, hiljem pooljuhtalaldid.<br />
Vedurites võeti kasutusele trafo koos alaldiga, millega saadi mootoritele sobiv madalpingeline<br />
alalisvool (pulseeriv vool). Mootoreid juhiti trafomähiste ümberlülitamisega. Selle süsteemi olulisim<br />
puudus on ebaühtlaselt koormatud elektrivõrgu faasid ja suured elektromagnetilised häired. 25 kV<br />
50 Hz ühefaasilist vahelduvvoolusüsteemi kasutatakse tänapäeval Prantsusmaal, Suurbritannias,<br />
Soomes, Venemaal, Leedus, Ungaris, Sloveenias, Slovakkias, Tšehhi vabariigis ja Jaapanis.<br />
Kõrgepingeliste jõupooljuhtseadiste odavnedes ja muundustehnika arenedes on võimalik rakendada<br />
30 kV alalispinget olemasolevates 25 kV vahelduvvoolu kontaktvõrkudes [ÖST92]. Kõrge- ja<br />
keskpingeliste vahelduvvoolu veotoitesüsteemide üheks probleemiks on olnud toitetrafo suur mass.<br />
Tulevikku vaadates võidakse vahelduvvooluga elektersõidukite toitesüsteemides rakendada ka sujuva<br />
kommutatsiooniga (soft-switched) kõrgsageduslikke alalisvoolumuundureid, milles kasutatakse väga<br />
kompaktseid ja kergeid kõrgsageduslikke keskpingetrafosid [BER00][GLI03]. Kirjanduses on välja<br />
pakutud ka ilma trafota kõrgepingelise vahelduvvoolutoitega jõuahelate lülitusi spetsiaalsete mitme<br />
isoleeritud staatormähisega veomootorite juhtimiseks [STE99].<br />
<strong>1.</strong>2.3. Mitme toitesüsteemi kasutamine<br />
Sageli (tihedalt asustatud piirkondades) vajatakse rööbassõidukeid, mis suudavad läbida erineva<br />
toitesüsteemiga raudteelõikusid. Mitmesüsteemilised sõidukid suudavad vahepeal peatumata töötada<br />
erinevates toitesüsteemides ja eri nivooga toitepingel. Mitmesüsteemilised raudteevedurid on eriti<br />
olulised rahvusvahelistel kaubavedudel kui vedurite vahetamine ühest raudteelõigust teise üleminekul<br />
pole otstarbekas [GEL95]. Euroopas kasutatakse nelja-süsteemilisi raudteevedureid<br />
(alalisvooluga 1,5 kV ja 3 kV või vahelduvvooluga 15 kV 16⅔ Hz ja 25 kV 50 Hz). Lisaks<br />
mitmesüsteemilistele veduritele kasutatakse Euroopas ka mitmesüsteemilisi kergrööbassõidukeid, sh.<br />
kergeid madalapõrandalisi tramme, mis on mõeldud sõitmiseks ka raudteedel. Mitmesüsteemilised<br />
trammid ja trammirongid võimaldavad siduda linnatranspordi äärelinnapiirkondi tihedalt asustatud<br />
kesklinnaaladega, kasutades selleks olemasolevaid raudtee- ja trammiliine. Multisüsteemsete<br />
trammirongidega saab kesklinnatänavatel kasutada madalamat toitepinget (600 V või 750 V) ning<br />
äärelinnapiirkonnas kasutada koos linnalähirongidega vastavaid keskpingesüsteemiga raudteelõike.<br />
Mitmesüsteemsetest trammidest ja nende elektrisüsteemidest annab ülevaate tabel <strong>1.</strong>3.<br />
Tabel <strong>1.</strong>3 Mitmesüsteemsed trammid ja nende elektrisüsteemid (2005)<br />
Firma, toode, projekt Toitevõrgu pinge Kirjeldus<br />
Siemens Avanto 600/750/<br />
1500/3000 VDC<br />
Mitmesüsteemse toitega<br />
madalapõrandaline kerge<br />
rööbassõiduk [BRI03].<br />
Projekt Kraków 600/3000 VDC Kahesüsteemse alalisvoolutoitega<br />
trammi pilootprojekt-uuring<br />
[KOW01].<br />
ALSTOM<br />
Regio CITADIS<br />
Projekt Kiepe<br />
Projekt<br />
Saar-Lor-Lux<br />
15 kV AC/<br />
750 VDC<br />
15 kV AC/<br />
750 VDC<br />
25 kV AC<br />
15kV AC 750 VDC<br />
Mitmesüsteemse alalis- /<br />
vahelduvpingetoitega trammirong<br />
Kahesüsteemse alalis- ja<br />
vahelduvpingetoitega trammi<br />
elektrisüsteem<br />
Trammirong [MEY03]<br />
Ajami jõuahelad peavad olema arvestatud tööks nimipingega ja standardis lubatud lühiajaliste<br />
ülepingetega. Seega peab ka mootorite isolatsioon taluma esinevaid ülepingeid. Madalama nimipingega<br />
ajamite ja olemasolevate mootorite toitmiseks kõrgema liinipingega võrgust on välja pakutud pinget<br />
alandavaid impulssmuundureid koos filtritega. Mitmes artiklis [KOW01] on kirjeldatud seadmeid, mida<br />
kavatsetakse kasutada 600 V nimipingega alalisvoolutrammi toitmiseks 3 kV alalisvoolu kontaktvõrgust.<br />
Uurimist vajavateks teoreetilisteks probleemideks on kaitse ja ümberlülitusalgoritmide ohutuse ja<br />
lülitusaparaatide töökindluse tagamine, liigpingete vähendamine keskpingeliste sõidukite veomootorite<br />
mähistes nii riistvaraliste kui ka tarkvaraliste vahenditega ja mitmesüsteemsete sõidukite toitemuundurite<br />
24
juhtimine. Käesolevas töös käsitletakse lähemalt madalpingelise alalisvoolutoitega trammide<br />
veoajameid.<br />
<strong>1.</strong>3. Veomootorid ja jõuülekanded<br />
Elekterveoajamites kasutatavaks põhiliseks mootoritüübiks on seni olnud jadaergutusega<br />
alalisvoolumootor, eelkõige oma sobiva kiiruse-momendi tunnusjoone tõttu. Traditsiooniliste<br />
jadaergutusega alalisvoolumootorite peamiseks puuduseks on mehaanilise kommutaatori olemasolu, mis<br />
vajab regulaarset hooldamist. Samuti on mootori ehitus võrreldes vahelduvvoolumootoritega keerukam<br />
ning hind seetõttu kallim. Viimase aja tehnoloogilised arengud ajamite juhtimissüsteemide alal on<br />
põhjustanud mehaanilise kommutaatorita e. pooljuhtkommutaatoriga mootorite (peamiselt nelinurk<br />
toitepingega mootorite) edasiarendamist ja laialdast kasutuselevõttu elekterveonduses. Koos sellega on<br />
paranenud ajamisüsteemi üldine kasutegur, suurenenud võimsus massiühiku kohta, vähenenud käidu- ja<br />
hoolduskulud ning suurenenud töökindlus. Samuti on oluliselt vähenenud pooljuhtkommutaatoriga<br />
mootoritega veoajami algmaksumus. Pooljuhtmuundurite leviku tõttu on uutes veoajamites hakatud<br />
jadaergutusega alalisvoolumootorite asemel üha enam rakendama ka muid mootoritüüpe, näiteks<br />
vahelduvvoolu lühisrootoriga asünkroonmootoreid. Elektrimootorite liigitus [CHA97] on toodud<br />
joonisel <strong>1.</strong>9, elektersõidukite veoajamites enamkasutatavad veomootorid on tähistatud jämedama<br />
joonega.<br />
Eletrimootorid<br />
Kommutaatoriga<br />
Kommutaatorita<br />
Sõltuva<br />
ergutusega<br />
Sõltumatu<br />
ergutusega<br />
Nelinurk<br />
toitepingega<br />
Siinus<br />
toitepingega<br />
Ergutus<br />
mähisega<br />
Jadaergutus<br />
Rööpergutus<br />
Püsimagnet<br />
ergutusega<br />
Harjadeta,<br />
püsimagnetergutusega<br />
Kommuteeritav<br />
reluktantsmootor<br />
Asünkroon<br />
Sünkroon<br />
Rootori<br />
mähisega<br />
Lühisrootoriga<br />
Faasirootoriga<br />
Püsimanget<br />
ergutus<br />
Reluktants<br />
Joonis <strong>1.</strong>9. Elekterveonduses kasutatavad mootorid<br />
Kõige enam kasutatakse kergrööbassõidukites mehaanilise kommutaatoriga alalisvoolumootoreid ja<br />
vahelduvvoolu asünkroonmootoreid, viimastest peamiselt lühisrootoriga mootoreid. Alalisvoolu<br />
veomootorid on pika elueaga, kuid vajavad perioodilist hooldamist. Sellised süsteeme<br />
rekonstrueeritakse 8-10 aastase perioodi järel, sest need vajavad kvaliteetsemat ja tehniliselt paremat<br />
juhtimissüsteemi.<br />
Uute sõidukite veoajamites rakendatakse reeglina mehaanilise kommutaatorita (kollektorita)<br />
hooldusvabu mootoritüüpe nagu asünkroonmootorid ja pooljuhtkommutaatoriga alalisvoolumootorid.<br />
Erijuhtudel on kasutusel ka teised mootoritüübid nt. sünkroonmootoreid kasutatakse suurema<br />
kasuteguri tõttu suurema võimsusega raskerongide veduritel. Prantsuse TGV kiirrongi vedurite uuele<br />
põlvkonnale valiti sünkroonmasinad, mis rakendati töösse 1993 [<strong>JA</strong>H01]. Pärast neid on<br />
veduriajamitesse projekteeritud peamiselt asünkroonmasinaid. Ümberlülitatava magnetilise<br />
takistusega ehk reluktantsmootorite (reaktiivsete sünkroonmootorite) eeliseks on lihtne<br />
konstruktsioon, väikesed hoolduskulud ja sobiv momendi-kiiruse tunnusjoon [RAH98]. Oma<br />
tööpõhimõttelt on reluktants-veomootorid samm-mootorite edasiarendus [CHA97] ning nende<br />
juhtimine toimub vektorjuhtimismeetoditega sarnaselt teiste vahelduvvoolumootorite (sünkroon- ja<br />
asünkroonmootorite) juhtimisele. Püsimagnetergutusega mootorite (PM) eelisteks on kõrgem<br />
kasutegur ja suurem võimsustihedus [JOC04]. Kergematel elektersõidukitel on laialdast kasutust<br />
leidnud nn harjadeta ehk pooljuhtkommutaatoriga alalisvoolumootorid [CHU01].<br />
Kokkuvõtteks võib veomootorite kohta väita järgmist. Asünkroonmootoreid ja mehaanilise<br />
kommutaatorita alalisvoolumootoreid eelistatakse madalama algmaksumuse ja väiksemate<br />
hoolduskulude tõttu. Uued madalapõrandalised sõidukid vajavad väikeste mõõtmetega mootoreid, mis<br />
25
suudavad tõhusalt talitleda ka piduritalitluses. Elektersõidukites eelistatakse veotelgede ja rataste<br />
eraldi juhtimist, mis võimaldab paremat veojõu juhtimist libisemise korral. Madalapõrandalistel<br />
sõidukitel on sageli kasutusel eraldi mootoritega veetavad rattad [CHE02].<br />
Jõuülekanne<br />
Elektriajami üheks komponendiks on ülekanne. Sõltuvalt rööbassõiduki liigist, kiirusest, põranda<br />
kõrgusest, rööbaste vahest ja paljudest muudest alusvankritega seotud tehnilistest iseärasustest, nagu<br />
liigendid jt. kasutatakse erinevaid jõuülekandeid [OKA98]. Kasutatakse rattarummu sisese<br />
veoülekandega ajameid ja kardaanülekandega ajameid. Täis-madalapõrandalistel alusvankritel ei saa<br />
kasutada läbivaid veotelgi, mistõttu sõiduki parem- ja vasakpoolseid rattaid veetakse eraldi<br />
mootoritega. Muudetava ülekandearvuga reduktorit rööbassõidukitel üldjuhul ei kasutata. Tabelis <strong>1.</strong>4<br />
on kujutatud alusvankrite ja mootori ratta erinevad konfiguratsioonid [TCR95].<br />
Tabel <strong>1.</strong>4 Kergrööbassõidukite veovankrite veoülekanded<br />
Tähis,<br />
joonis<br />
M1<br />
Selgitus<br />
Tavaline ühemootoriline pikimootoriga vanker (wheelset ”B”) kus<br />
mõlemad veoteljed on omavahel seotud ühe veomootori külge<br />
M2<br />
M3<br />
Tavaline kahemootoriline piki- või põikmootoritega vanker (wheelset<br />
”Bo”). Harilikult kasutatakse sõidukil kahte alusvankrit nelja sõltumatu<br />
veomootoriga (wheelset Bo'+Bo'). Tatra T3, T4 ja KT4 trammidel<br />
(Tallinnas, Riias ja mujal) on mootorite võllid on risti veoteljega ja piki<br />
sõidusuunda. Sellest erinev kahemootoriline alusvanker on kasutusel<br />
Riia vagunitehases (RVR) toodetud elektrirongidel ER2, kus kasutatakse<br />
rööpvõllidega reduktoreid, kus veomootorite võllid on rööbiti<br />
veotelgedega. Läbivate veotelgede ja mootorite paigutuse tõttu ei sobi<br />
nimetatud mootori ratta konfiguratsioonid üleni madalapõrandalistele<br />
vagunitele.<br />
Sõltumatu vedava ja veetava rattapaariga vanker<br />
M4<br />
M5<br />
M6<br />
M7<br />
M8<br />
M9<br />
Põikasetusega rühmmootoriga vanker, mille mõlemad veoteljed on<br />
seotud paralleelsete reduktorite ja kardaanivõlliga<br />
Mootoritega ja elektriliselt juhitav isepöörav rattapaar. Patenteeritud<br />
lahendus [BIS98]<br />
Kahe suure veoratta ja kahe väikese juhtrattaga (st. juhtrataste abil<br />
pööratav) liigendvanker<br />
Nelja sõltumatu ratasmootoriga vanker. See variant on kasutusel<br />
Duewag/Siemens R3.1 (Frankfurt), ABB (Henschell) Variotram<br />
(Chemnitz, Helsinki) ja BN tram 2000’l Brüsselis. Vesijahutusega<br />
vahelduvvoolumootorid on paigutatud eraldi pöörlevate rataste<br />
rummudesse. Rattaid veetakse planetaarreduktoriga, mis paikneb<br />
mootoriga samas kestas.<br />
Külgedel paiknevate veomootorite ja kardaanülekandega vanker. Seda<br />
kasutati Schindler COBRA (VBZ Zürich, Šveits) prototüüptrammil. Üks<br />
vahelduvvoolu asünkroonmootor, mis paikneb vaguni kere küljes<br />
põranda all. Mootor veab kardaani kaudu sõltumatult pöörlevate rataste<br />
paari ühel küljel. Iga ratta küljes on ristuvate võllidega koonusreduktor.<br />
Vaguni liigendlülis paiknevate vertikaalsete veomootoritega vanker. Seda<br />
lahendust kasutati SGP ULF 197 trammil Viinis. Igal eraldipöörleval<br />
rattaajamil on ristuvate võllidega koonusreduktor ja vesijahutusega<br />
asünkroonmootor.<br />
26
Tähis,<br />
joonis<br />
M10<br />
Selgitus<br />
Sõltumatute veorataste ja silinderreduktoritega vanker. Seda kasutatakse<br />
ABB Eurotram (Strasbourg) vedavatel vankritel. Igat nelja sõltumatult<br />
teljekasti küljes pöörlevat ratast veetakse reduktori kaudu eraldi<br />
paiknevate 3 faasilise vesijahutusega asünkroonmootoriga.<br />
Üha enam paigutatakse veovankritesse elektroonikaseadmeid sh. mitmesuguseid andureid.<br />
Välistingimustes töötavate andurite töökindlus on sageli probleemiks. Kompaktsed ja suure<br />
võimsustihedusega madalapõrandalised veovankrid vajavad head jahutussüsteemi ühtlase<br />
töötemperatuuri ja pika eluea tagamiseks. Edasist uurimist vajavateks probleemideks on mitme eraldi<br />
veomootoriga veovanker ja veomomentide ühtlustamine veotelgede vahel, veomootorite optimaalne<br />
juhtimine laias kiiruste vahemikus ja veomootorite pinge reguleerimine ning mootori kaitse ajami<br />
rikete korral<br />
Nimetatud probleeme on arvutimudelite ja eksperimentide abil uuritud käesoleva töö teises,<br />
modelleerimist käsitlevas peatükis eesmärgiga välja töötada heade dünaamiliste omadustega veoajam.<br />
Veoajami juhtimissüsteemi riistvarast ja tarkvarast antakse ülevaade käesoleva töö kolmandas<br />
peatükis.<br />
<strong>1.</strong>4. Juhtimissüsteemid<br />
<strong>1.</strong>4.<strong>1.</strong> Veoajami juhtimissüsteemide tarkvara funktsioonid<br />
Veomootorid ja muundur koos mitmesuguste andurite ja lisaseadmetega moodustavad veoajami, mille<br />
juhtimiseks kasutatakse mitmeid meetodeid, sh. veomootorite magnetvälja nõrgendamist, muunduri<br />
alalisvoolulüli pinge reguleerimist, sh. kondensaatorpatarei laadimise juhtimist, pinge piiramist jms.<br />
Elekterveoajami juhtimissüsteemist ja selle alamsüsteemidest annab ülevaate joonis <strong>1.</strong>10. Kõigi<br />
kirjeldatud süsteemide juhtimiseks rakendatakse nüüdisaegseid infotehnoloogilisi ja mudelipõhiseid<br />
meetodeid.<br />
Energiahaldus- ja<br />
säästusüsteemid<br />
Libisemisevastased<br />
süsteemid<br />
Mudelipõhised<br />
juhtimissüsteemid<br />
Mudelipõhine<br />
kaitsetesüsteem<br />
Veoajami<br />
juhtimissüsteem<br />
Diagnostikasüsteemid<br />
Andmesidesüsteemid<br />
Pidurite<br />
juhtimissüsteem<br />
Intelligentsed<br />
kasutajaliidesed<br />
Joonis <strong>1.</strong>10 Veoajamites kasutatavad juhtimissüsteemid<br />
Lisaks põhifunktsioonidele, milleks on kiiruse, veojõu ja pidurdusjõu reguleerimine, on nüüdisaegsete<br />
kolmanda põlvkonna veoajamite juhtimissüsteemidesse integreeritud mitmeid lisasüsteeme ja -<br />
funktsioone.<br />
27
Ajami mudelipõhistest juhtimissüsteemidest kasutatakse käesolevas töös ergutuse mudelipõhist<br />
juhtimist ja vahelduvvoolumootorite korral on võimalik kasutada magnetvoo väljavektori juhtimist.<br />
Libisemisevastased süsteemides rakendatakse veojõukontrolli ja veojõu piiramismeetodeid sõidul<br />
ning pidurdusjõu piiramist rataste libisemisevastase süsteemiga (ABS) pidurdusel. Arukad<br />
elektromehaanilised pidurisüsteemid võimaldavad pidurdusjõu juhtimist koos täiendavate<br />
mehaaniliste pidurisüsteemide rakendamisega. Elektromehaanilise pidurisüsteemide juhtimine on<br />
tihedalt seotud elektriajami pidurduse juhtimise ja energiahaldusega s.h elektrodünaamilise ja<br />
rekuperatiivpidurduse automaatjuhtimisega. Elektriliste seisupidurite juhtimine toimub kooskõlas<br />
ajami talitlusega. Kasutatakse ka mehaaniliste libisemiskaitse süsteemide näiteks elektriliselt<br />
juhitavate liivatite juhtimine pidurdusel. Mudelipõhises kaitsesüsteemis kasutatakse lisaks<br />
tavapärastele kaitseaparaatidele ka mikroprotsessorsüsteemis toimivatel mudelitel põhinevaid<br />
keerukaid kaitsealgoritme. Kaitsesüsteem võimaldab ka pidurdusega seotud ahelate reserveerimist.<br />
Kaitsesüsteemi, kasutaja- ja andmesideliidestega tihedalt seotud diagnostikasüsteemides kasutatakse<br />
vigade määramiseks samuti mudeleid. Arukad kasutajaliidesed s.h. sõiduki arukad juhtimisorganid<br />
võimaldavad rakendada meetodeid sõiduohutuse ja kasuteguri parandamiseks. Jõu tagasiside<br />
juhtimisorganitele, nt pedaalidele võimaldab parandada teeolude tunnetamist sõidukijuhi poolt ja<br />
seega ka sõiduki juhitavust. Sõiduabisüsteemid (erinevad sõidutalitlused erinevate teetingimuste jaoks,<br />
teeolude indikatsioon jms.) võimaldavad valida sobivaima sõidukiiruse. Sõiduki liikumisega seotud<br />
abiahelate ja blokeeringute juhtimine (veoajami juhtimissüsteemi signaale kasutatakse nt. sõiduki uste,<br />
pöörangute jms. juhtimisel) parandab sõiduki abisüsteemide ohutust. Juhtimissüsteemi ehitusest ja<br />
hajutatusest tulenevalt kasutatakse juhtimisplokkide vahel andmesidesüsteemi (CAN, Ethernet,<br />
vms.), mille kaudu on võimalik rongiks ühendatud sõidukite veomuundurite omavaheline<br />
sünkroniseerimine ja tagasisidega signalisatsiooni- ja indikatsioonisüsteemi s.h. piduritulede,<br />
hoiatuskellade jms. sidumine veoajami juhtimisega. Arukad tagasisidega pooljuhtreleed võimaldavad<br />
kontrollida abiseadmete tööd, nt. lampide läbipõlemise diagnostikat sõidu ajal.<br />
Energiahaldus- ja säästusüsteemides rakendatakse mitmesuguseid juhtimismeetodeid nagu nt.<br />
kombineeritud takistus- ja rekuperatiivpidurdus, pidurdustalitluse paindlik juhtimine energia<br />
efektiivseks regenereerimiseks kontaktvõrku. Pilooteksemplaridel on realiseeritud energiasalvestitega<br />
sõidukeid. See võimaldab uurida energiahaldussüsteemidega sõiduki energiavaru juhtimist s.h.<br />
keemiliselt akudes, elektriliselt ülikondensaatorites, või mehaaniliselt sõiduki liikumises s.h.<br />
hooratastes salvestatud energia ja kütte soojusenergia juhtimist. Liikluse juhtimissüsteemi abil on<br />
tulevikus võimalik veoajamite võimsuspiirangu pidev juhtimine ja sõidukite liikumise<br />
kooskõlastamine kadude vähendamiseks toiteliinides.<br />
<strong>1.</strong>4.2. Alalisvoolumootoritega veoajamite juhtimismeetodid<br />
Vanemate alalisvoolu veoajamite puhul on levinuim jadaergutus. Sellisel ajamil on juba ilma<br />
juhtimissüsteemi abita veoajamile sobiv kiiruse-momendi tunnusjoon. Reostaat-juhtimisega ajamites<br />
toimivad reostaadi astmed veomootorite voolu piiravate elementidena ka avatud ahelaga<br />
juhtimissüsteemis st. ilma tagasisideahelaid kasutamata. Nüüdisaegsetes süsteemides kasutatakse<br />
valdavalt pinge pulsilaiusjuhtimist koos suletud juhtimisahelaga. Impulssjuhtimisega kombineeritud<br />
süsteemides rakendatakse relee-kontaktorjuhtimist pinge ja voolu reguleerimisulatuse laiendamiseks,<br />
voolu piiramiseks, koormuste ümber-rühmitamiseks jadalülitusest paralleellülituseks ja vastupidi,<br />
mootorite mähiste ümberlülitamiseks, eri ahelate voolude ühtlustamiseks ahelate jadalülitusega ja eri<br />
ahelate pingete ühtlustamist ahelate rööplülitusega. Relee-kontaktorjuhtimise puuduseks on täiendavad<br />
lülituselemendid - releed ja kontaktorid, mis suurendavad juhtimise keerukust ning vähendavad<br />
töökindlust. Mehaaniliste ja elektromehaaniliste lülitite (kontaktorite) puuduseks on aeglane toimekiirus<br />
ja elektrikaare tekkimine voolu väljalülitamisel.<br />
Pulsilaiusjuhtimist kasutatakse muundurite pinge ja voolu ning mootori kiiruse juhtimiseks. Voolu<br />
piiravate passiivkomponentide puudumisel pole avatud ahelaga juhtimine kasutatav, mistõttu<br />
rakendatakse tagasisidega juhtimismeetodeid. Voolu reguleerimist kasutatakse jadaergutusega<br />
alalisvoolumasinate korral. Voolu reguleerimine on heade dünaamiliste omadustega, kuid on<br />
põhjustab jäiga tunnusjoone tõttu libisemisprobleeme. Libisemisevastane süsteem on vajalik<br />
(möödapääsmatu). Kiiruse ja voolu (või momendi) reguleerimine annab paremad dünaamilised<br />
28
omadused ja võimaldab sujuvaid kiirendusrampide kõveraid, kuid mõnedes töörežiimides põhjustab<br />
libisemist võnkumiste tõttu sõiduki erinevate veotelgede vahel. Seetõttu on vajalik kõigi ajami<br />
veotelgede ühtne juhtimine ja kiiruseandurite kasutamine kõigil veotelgedel. Lisaks loetletutele saab<br />
rakendada ka kombineeritud juhtimist erinevates tööpiirkondades ja töörežiimides. Paljudes vanemates<br />
lahendustes kasutatakse keerukama juhtimissüsteemi asemel ühte võimsat muundurit kogu süsteemi<br />
toiteks. Sellise lahenduse puudusteks on jõupooljuhtkomponentide kõrgem hind, libisemisevastase<br />
süsteemi ja reserveerimisvõimaluste puudumine.<br />
<strong>1.</strong>4.3. Magnetvälja või ergutusvoolu juhtimine<br />
Nüüdisaegsetes veoajamites on veomootorite magnetvälja nõrgenduse kasutamise peamiseks põhjuseks<br />
veomuundurite väljundpinge piiratus [CHA03]. Kergrööbassõidukite elekterveoajamites ei kasutata<br />
muudetava ülekandeteguriga veoülekandeid. Seega peavad mootorid talitlema laias kiiruste vahemikus<br />
piiratud võimsusega. Selleks on vaja nii alalisvoolu kui ka vahelduvvoolu induktsioon veomootorite<br />
puhul reguleerida magnetvälja tugevust. Nimikiirustest suurematel kiirustel tuleb piirata mootori<br />
võimsust. Üheks võimsuse piiramise võimaluseks on magnetvälja nõrgendamine. Magnetvälja<br />
nõrgendamine võimaldab suurendada veomootorite kiirust suurendamata mähiste voolusid ja võimsust.<br />
Alalisvoolumootorite korral saab kasutada veomootorite ergutuse mudelipõhist juhtimist ja<br />
vahelduvvoolumootorite korral magnetvoo vektorjuhtimist või pinge-sagedussõltuvuse funktsiooni.<br />
Pingevaheldites ja pinget alandavates alalispinge muundurites puudub pinget kõrgendav lüli ja<br />
veomuunduri väljundpinge maksimaalväärtus on seotud toitepingega. Ajamisüsteemide lihtsustamise<br />
huvides välditakse magnetvälja nõrgendamist kui veomuunduri väljundpinge on piisav veomootorite<br />
kiiruse suurendamiseks üle nimikiiruse. Lühiajalist ülekoormatavust suurtel kiirustel tuleb sel juhul<br />
veomootorite valikul arvestada.<br />
Magnetvälja nõrgendamiseks kasutatakse alalisvoolu veoajamites ergutusmähiste šuntimist kontaktide ja<br />
takistitega, ergutusmähiste šuntimist pooljuhtlülititega, ahelate ümber-rühmitamist nt. rööplülitusest<br />
jadalülituseks ja vastupidi, ergutuse juhtimine impulssmuunduriga, väljanõrgendust magnetite<br />
mehaanilise pööramisega püsimagnetergutusega veomootorites. Keerukuse tõttu on nimetatud meetod<br />
vähelevinud. Ajami ülesergutamise võimalused pingetust olekust veeremisel ja rekuperatiivpidurdus<br />
sõltuvad juhtimissüsteemist ja ajami elektriskeemist.<br />
<strong>1.</strong>4.4. Vahelduvvoolu veomootorite juhtimismeetodid<br />
Vahelduvvoolu veoajamites kasutatakse paindlikku juhtimist võimaldavaid transistorvaheldeid,<br />
mistõttu veojõu ja töörežiimide muutmiseks väljundahelates täiendavaid kontaktoreid üldjuhul ei<br />
kasutata.<br />
Skalaarjuhtimisel (näiteks U f = const ) on siirdeprotsesside ajal mootorites suured kaod. Seega<br />
tuleb vajaliku momendi saavutamiseks sõiduki kiirendamisel ja pidurdamisel valida mootorid<br />
tunduvalt suurema võimsusega võrreldes samade veoomadustega alalisvoolumootoritega.<br />
Skalaarjuhtimine on suhteliselt lihtsalt kasutatav paralleellülituses veomootorite puhul.<br />
Magnetvoo vektorjuhtimine koos mootori momendijuhtimisega võimaldab saavutada väga heade<br />
staatiliste ja dünaamiliste omadustega ning suure kasuteguriga ajami. Samuti saab kasutada skalaar- ja<br />
vektorjuhtimist eri tööpiirkondades kombineeritult. Magnetvoo vektorjuhtimise meetodid on<br />
tänapäeval laialdaselt kasutusel. Peamiselt kasutatakse momendi otsejuhtimist (DTC)<br />
asünkroonmootorite juhtimiseks, kuid vastavad anduriteta momendi otsejuhtimise meetodid on<br />
väljatöötatud ka mõnede teiste mootoritüüpide (nt. reluktantsmootorite) jaoks. Vektorjuhtimise<br />
rakendamine mitmemootorilise ajamiga elektersõidukil osutub väga komplitseeritud probleemiks.<br />
Rataste veomomentide ja kiiruste ühtlustamine mitmemootorilises vektorjuhtimisega ajamis on<br />
keerukas ülesanne, mille lahendamine praktikas pole alati õnnestunud. Tulemuseks on rataste<br />
suurenenud ja ebaühtlane kulumine ning probleemid trammi juhtimisel. Paralleellülituses<br />
veomootorite mudelipõhist juhtimist käsitletakse kirjandusallikates [BOI04]. Mitme vahelduvvoolu<br />
veomootori paindlikuks juhtimiseks on vaja kasutada eraldi toitemuundureid [HEI95].<br />
29
Aastal 1995 valmis Helsingis ABB katse-trammivagun nr. 11, milles kasutatakse kiiruseanduriteta<br />
momendi otsejuhtimist [HEI95]. Tramm on läbivate veotelgedega ja heade dünaamiliste omadustega.<br />
Madalapõrandaline ja seega läbivate veotelgedeta ja rataste sõltumatu juhtimisega (Adtrans<br />
Variotram) vagunid saadeti juhtimissüsteemi probleemide tõttu pärast katsekäitu tehasesse<br />
täiustamiseks tagasi. Veoratastega sõltumatu juhtimisega seonduvate probleemide analüüsi võib leida<br />
kirjandusest [CHE02].<br />
Mõnedes mitmesüsteemilise toitega vahelduvvoolu veoajamis [KET97] kasutatakse veomuunduri<br />
väljundis kontaktoreid veomootorite täht-kolmnurk ümberlülituseks [FUC99]. Sõltumatult toimivaid<br />
kaitseahelaid vajatakse juhul kui ühest veomuundurist toidetakse mitut vahelduvvoolumootorit ja<br />
veomootorite sõltumatu reserveeritava juhtimise tagamiseks rikete korral. Lüliteid ja kontaktoreid<br />
väljundahelates vajatakse ka mitmesuguste hooldusfunktsioonide täitmiseks nagu näiteks veorataste<br />
lihvimine. Paindlik veomuundur peaks olema kasutatav erinevate väljundahelate ja mootoritüüpidega.<br />
<strong>1.</strong>5. Energiasäästumeetodid<br />
Elekterveoajam on elektersõidukis suurima võimsuse ja energiatarbega süsteemiks ja võib olla ka<br />
elektrienergia allikaks pidurdusel. Elekterveoajami töörežiimid määravad energia suuna ajami ja võrgu<br />
vahel. Sõidukeid ja nende ajamisüsteeme võib energia juhtimise järgi liigitada<br />
Elektersõiduki veoajam<br />
Juhitamatu<br />
ühesuunalise<br />
energiavooga<br />
T arbitava võimsuse<br />
ja püsi-sõidukiiruse<br />
piiranguga<br />
Regenereeritava<br />
võimsuse<br />
juhtimisega<br />
Energiahaldus<br />
elektrienergia<br />
salvestamiseta<br />
Energiahaldus<br />
energiasalvestite<br />
juhtimisega<br />
Joonis <strong>1.</strong>11 Veoajamite energia juhtimisvõimaluste liigitus<br />
Vanemad trammide ja trollibusside veoajamid on valdavalt ilma püsikiiruseta ja juhitamatu<br />
ühesuunalise energiavooga. Piiratud on vaid sõidukite maksimaalne tarbitav võimsus. Sõidukite<br />
poolt tarbitava võimsuse kooskõlastatud piiramine on vajalik kui alajaama väljundvõimsusest ei piisa<br />
kõigi sõidukite üheaegseks kiirendamiseks. See on vajalik näiteks liiklusseisakute puhul paljude<br />
sõidukite sõidu alustamiseks ühe veoalajaama toitepiirkonnast. Automaatses energiahaldussüsteemis<br />
on võimalik rakendada nii ajalist kui ka prioriteedipõhist juhtimist. Ühtlast sõidukiirust võimaldavate<br />
veoajamitega süsteemis saab prioriteedi- ja ajapõhist võimsuse ja sõidukiiruse piiramist kasutada<br />
elektrienergia kokkuhoiuks ja pingekvaliteedi parandamiseks. Pidurdusenergiat on võimalik tagastada<br />
kontaktvõrku. Vajadus tagastatavat võimsust juhtida tuleneb pingekvaliteedi nõuetest.<br />
Rekuperatiivpidurdus pole tehnilistel põhjustel rakendatav ka kõigil sõidukiirustel, mistõttu<br />
rakendatakse erinevaid kombineeritud pidurisüsteeme.<br />
Elektrienergia salvestamiseta energiahaldus kasutab sõiduki erinevate süsteemide salvestusvõimalusi,<br />
nt. võrku tagastatava võimsuse ja abiseadmete nt. kütteahelate poolt tarbitava võimsuse juhtimist<br />
rekuperatiivpidurduse ajal. Elektrienergia salvestite olemasolul on võimalik energiavoogude paindlik<br />
juhtimine vähendamaks energiakadusid kontaktvõrgus. Energiavoo juhtimine ja sõiduki energiahaldus<br />
sõidukis või transpordiettevõttes on energiatehnikas oluliseks arengusuunaks.<br />
Kasutatavate meetodite valik ning tasuvus sõltub kiirendus- ja pidurdusprotsesside kestusest<br />
liiklusoludes ja neile esitatud nõuetest. Veoajami rekonstrueerimise tasuvus-uuringul tuleb arvestada<br />
valitava töörežiimiga, sest töörežiimist sõltub süsteemi maksumus. Näiteks tihedama liikluse korral on<br />
ka võimaliku rekuperatiivpidurduse osakaal suurem. Selleks tehakse sõidutsüklite mõõtmisi reaalsetes<br />
liiklusoludes ja vastaval koormusel. Saadud tulemusi kasutatakse tasuvus-uuringus ja tehniliste<br />
lahenduste valikul.<br />
<strong>1.</strong>5.<strong>1.</strong> Pidurdusenergia kasutamise ja edastamise juhtimine<br />
Elektrilise pidurduse kasutamisel tuleb pidurdusenergia suunata kas pidurdustakistisse<br />
(elektrodünaamiline pidurdus), tagasi kontaktvõrku või energiasalvestisse (rekuperatiivpidurdus).<br />
Enamik nüüdisaegseid veoajameid on kombineeritud elektrilise pidurdusega, mis võimaldab<br />
samaaegselt paindlikult juhtida nii elektrodünaamilist kui ka rekuperatiivpidurdust. Elektrist pidurdust<br />
pole võimalik füüsiliselt eraldada kui kiirenduse ja eri pidurdusrežiimide jaoks kasutatakse samu<br />
30
veomootoreid ja elektriahelad. See kehtib enamiku nüüdisaegsete juhitavate vahelduvvooluveomootoritega<br />
ajamite kohta.<br />
Trammide pidurdusmeetodid võib liigitada järgmiselt: Pidurdus mehaaniliste piduritega,<br />
elektrodünaamiline takistuspidurdus energiat kontaktvõrku tagastamata, osaline rekuperatiivpidurdus<br />
pinget kõrgendava muundurita, rekuperatiivpidurdus pinget kõrgendava muunduriga,<br />
rekuperatiivpidurdus voolu reguleerimisega ning energia regenereerimine võrku kasutades toiteahela<br />
sisendis kiiretoimelisi pooljuhtlüliteid, rekuperatiivpidurdus voolu reguleerimisega ja energia<br />
regenereerimine võrku või salvestamine. Tööstuses laialt kasutatavat vahelduvvooluajamite<br />
alalisvoolupidurdust sõidukitel üldjuhul ei kasutata.<br />
Elekterveoajamid on projekteeritud tööks nimipingealas. Kontaktliini pinge rekuperatiivpidurduse<br />
režiimis on oluliselt kõrgem kui kiirendusel ja vabajooksul. Pinge ülemise piiri määrab<br />
pidurdusmuunduri (brake-chopper) pingesätted (näiteks pinge ülemine piir 600 V nimipingel võib olla<br />
720 V). Pingestandard [EN 50163] lubab 600 V nimipinge korral lühiajalisi ülepingeid kuni 800V.<br />
Veomuundurite tööpingenivood tuleb seada vastavalt kontaktvõrgu toitepingenivoole (nimipingele).<br />
Samas peavad olema ühildatud ka eri sõidukite pingenivoode sätted. Töörežiimi vahetamiseks ja<br />
paindlikuks kaitseks kasutatakse jõuahelas täiendavat kiiretoimelist sisendlülitit, mis sisaldavad nii<br />
elektromehaanilist lülitit kui ka elektrikaare vältimise pooljuhtahelaid [MEY00]. Pidurdusenergia<br />
paremaks ärakasutamiseks suunatakse see energiasalvestitesse [TAK03][JOL0422] või juhitavatesse<br />
küttekehadesse. Sõiduki kiiretoimelise sisendmuunduriga saab piirata võrku antavat<br />
rekuperatiivpidurdusvoolu.<br />
<strong>1.</strong>5.2. Autonoomsed energiahaldussüsteemid<br />
Energiahaldussüsteemid võimaldavad liinist tarbitava ja ajamis regenereeritava võimsuse paremat<br />
edastamist ja ärakasutamist sõidukis. Ajami pea-vooluahela eri lülituste puhul kasutatakse erinevaid<br />
juhtimismeetodeid ja seega ka erinevaid energiahalduse meetodeid. Keerukamad<br />
energiahaldusesüsteemid on kasutusel piiratud energiasalvestusvõimalustega autonoomsetes<br />
elektersõidukites. Energiakasutuse efektiivsuse suurendamine ja salvesti energiahulga jälgimine on<br />
autonoomse elektersõiduki rahuldava jõudluse saavutamisel [CHA97] üks põhiülesandeid.<br />
Kontaktliiniga seotud rööbassõidukile kohandatud energiahaldussüsteemi struktuur on näidatud<br />
joonisel <strong>1.</strong>12.<br />
S uure võimsuse süsteemid<br />
Veoajamite<br />
süsteem<br />
Küttesüsteem<br />
Aku ko os<br />
laadija ja<br />
energiavaru<br />
hald us ega<br />
V äikese võimsusega madalapingelised seadmed<br />
Ab iahelate<br />
to itemuundur<br />
Välisvalgustus<br />
Sisevalgustus<br />
A biajamid<br />
Pidurid,<br />
Juhtahelad<br />
Andurid<br />
Kiiruse<br />
andurid<br />
Kiirenduse<br />
mõõtja<br />
Siseõhu<br />
temp.<br />
Välisõhu<br />
temp.<br />
Sõidu k isisene energiahaldu ssü steem (EM S)<br />
Kooskõlastab veoajami, küttesüsteemi, valgustuse,<br />
energiasalvestite jt. süsteemide tööd.<br />
Kustumatu<br />
operatiivmälu<br />
(N VRA M )<br />
Sõiduprofiilide<br />
ja olekuinfoga<br />
M ikrokontroller<br />
koos<br />
andmesideliidestega<br />
Püsimälu<br />
(RO M )<br />
Sõiduki<br />
komponentide<br />
mudelitega<br />
Kasutaja<br />
liides<br />
Energia<br />
arvesti<br />
Salvesti<br />
näidik<br />
Võimsus<br />
näidik<br />
Läbisõidu<br />
näidik<br />
M uunduri<br />
temp.<br />
M ootori<br />
temp.<br />
Juhtimis<br />
lülitid<br />
Kasutajaliides (HM I)<br />
Juhtimis<br />
nupud<br />
Kiirenduspedaal<br />
Piduripedaal<br />
Spidomeeter<br />
T eksti<br />
kuvar<br />
Joonis <strong>1.</strong>12 Toiteliinist toidetava sõiduki energiahaldussüsteemi struktuur<br />
Joonisel <strong>1.</strong>12 kujutatud energiahaldussüsteem kasutab sõiduki alamsüsteemides paiknevate andurite<br />
infot, mille järgi: näitab energiavarusid ja standard-sõiduprofiili järgi autonoomselt läbitavat<br />
vahemaad; juhib sõiduki alamsüsteemide energiakasutust; soovitab väiksema energiakuluga<br />
sõidustiili; suunab rekuperatiivpidurduse energia energiasalvestisse (akud või ülikondensaatorid);<br />
valib aku laadimisalgoritmi vastavalt aku laadimisolekule ja eelnevatele laadimistsüklitele; muudab<br />
31
kliimaseadmete juhtimist vastavalt jooksvatele sõidutingimustele;<br />
vastavalt välisvalguse intensiivsusele.<br />
reguleerib valgustuse heledust<br />
Sõiduki alamsüsteemide ja pardaseadmete talitluste juhtimine toimub sõiduki juhtsiini kaudu. Juhtsiini<br />
kaudu kogutakse infot alamsüsteemides paiknevatest anduritest ja edastatakse alamsüsteemidel<br />
juhttoimed. Levinuimaks siinisüsteemiks sõidukites on mitme ülemseadmega CAN siin.<br />
Autonoomsetes sõidukites on energiahaldussüsteemi võimalik siduda navigatsioonisüsteemiga, see<br />
võimaldab valida väiksema energiakuluga marsruute, paigutada laadimisseadmeid pikematele<br />
marsruutidele. Samuti võimaldab see muuta soovitavaid marsruute (route predictions) ja hinnata<br />
võimalikku sõiduulatust (range prediction) reaalajas vastavalt liiklusoludele. Sõidukiiruse ja tarbitava<br />
võimsuse piiramist saab kasutada energiakulu vähendamiseks.<br />
<strong>1.</strong>5.3. Energiahaldus kontaktliiniga seotud sõidukitel<br />
Energiahalduse meetodid on rakendatavad ka kergetel rööbassõidukitel ja trammidel. Kirjandusest<br />
võib leida uurimistööde ülevaateid energiaefektiivsete tehnoloogiate rakendamise kohta raudteedel<br />
[NOL03]. Energiahaldussüsteem koos energiasalvestite [GAY02] nagu näiteks hoorataste (nt. firma<br />
Beacon Power salvestusalajaam) ja ülikondensaatorite nt. firma Siemens salvestusalajaama<br />
SITRAS SES [SIE05] kasutamisega on võimalik süsteemi kasutegurit tervikuna suurendada [RUF03].<br />
Energiasalvesteid koos teenindavate muunduritega saab paigutada nii alajaamadesse kui ka<br />
sõidukitesse nt. firma Bombardier trammiajamilahendus [STE04] ja firma Vossloh Kiepe GmbH<br />
trammi ja bussi hübriidajamilahendus [LOH04]. Hooratas salvestit saab paigutada ka rööbassõiduki<br />
alusvankrile [PAR03]. Samuti võib kirjandusest leida energiasalvestiga alalisvoolu rööbassõidukite<br />
võimalikke põhimõttelisi tehnilisi lahendusi [TAK03]. Kontaktvõrgust toidetavate elektersõidukite<br />
(trammide, rongide või trollibusside) energiavahetuse juhtimissüsteemi kohta on TTÜ esitanud<br />
patenditaotluse [PET0424]. Mitme, kontaktliini samas sektsioonis paikneva sõiduki vahel on vajalik<br />
energiavoogude reaalajas juhtimist võimaldavate (traadita-) andesidekanalite olemasolu.<br />
<strong>1.</strong>6. Hõõrde juhtimine kergrööbassõidukitel<br />
Veojõud ja pidurdusjõud sõltuvad ratta ja rööpa vahelisest hõõrdest. Veojõu või pidurdusjõu<br />
rakendamisel tekib alati mõningane libistus ratta ja rööpa vahel. Väga suurte jõudude tõttu ratta ja<br />
rööpa kokkupuutepunktis on võimalik saavutada suurt hõõrdejõudu. Samas, isegi molekulaarses<br />
koguses lisandid vähendavad hõõrdumist märkimisväärselt. Need mõjurid on väga juhuslikud ning<br />
neid pole võimalik täpselt modelleerida. Iga süsteem peab aga suutma töötada neist mõjuritest<br />
sõltumata. Põhilisteks lisanditeks, mis hõõrdetegurit mõjutavad on vesi, jää, õli, rauapuru, liiv jms.<br />
Nüüdisaegsete veoajamite juhtimissüsteemid korrigeerivad sõidukijuhi poolt etteantavat signaali ja<br />
võimaldavad reaalajas leida parima hõõrdumise ja seega ka parima kiirenduse või pidurduse.<br />
<strong>1.</strong>6.<strong>1.</strong> Libisemise tuvastamine<br />
Enamikus ajamisüsteemides kasutatakse täpsema tulemuse saamiseks kiiruseandureid. Eraldi<br />
juhitavate mootoritega vahelduvvooluajamites on võimalik pöörlemiskiirust määrata ka mootori<br />
vektormudelite abil. Kiiruse erinevuse meetod [YAS97] kasutab tagasisideks libisemisekiirust v s :<br />
vs<br />
= ωr<br />
⋅ r − vref<br />
,<br />
(<strong>1.</strong>1)<br />
kus: ω r – veotelje või veoratta nurkkiirus, r – veoratta raadius, v ref – sõiduki etteandekiirus, mis<br />
leitakse rataste nurkkiiruste minimaalväärtuste järgi. Mida rohkem rattaid on kasutusel<br />
miinimumkiiruse määramisel, seda parema täpsusega on leitav etteandekiirus. Üldjuhul on sõidukitel<br />
kasutusel ka teisi meetodeid [GUS95], milleks on kiiruste erinevused vedavate ja mittevedavate rataste<br />
vahel, sõiduki dünaamika analüsaator, teepinna peegelduste jälgimine sõiduki ees paiknevate optiliste<br />
anduritega, ratta heli analüüs akustiliste anduritega ja rattasiseste mehaaniliste pingete mõõtmine<br />
anduritega. Eraldi toitemuunduritest juhitavate vahelduvvooluajamite puhul saab rakendada<br />
veorataste kiiruste määramist mootorite voolude järgi [WAT02]. Sõltumatu ergutusega ja eraldi<br />
juhitavate mootorirühmadega alalisvooluajamis saab rakendada libisemise tuvastamist mootorite<br />
elektromotoorjõudude abil.<br />
32
<strong>1.</strong>6.2. Veojõu juhtimine veorataste libisemisel<br />
Hõõrdumise juhtimisel eristatakse järgnevaid tööpiirkondi: stabiilset vedu ilma olulise libisemiseta,<br />
libisemist, libisemist hõõrdejõu ja väljundmomendi tasakaaluolekus, veomomendi vähendamist<br />
libisemise vähendamiseks, veomomendi taastamist arvutuslikule hõõrdejõule vastavaks, veomomendi<br />
taastamist seadesignaalile vastavaks. Kirjandusest võib leida vektorjuhtimisega vahelduvvoolu<br />
veoajamites kasutatavaid haardetaastamise meetodeid [HOR99] ja rööbassõiduki ABB Variotram<br />
(Helsinki, Chemniz) lahendust [SCH97]. eojõu juhtimiseks libisemise korral kasutatakse järgmisi<br />
meetodeid [FRY03]: otseselt, vahetult mittemõõdetavate parameetrite määramine tehisnärvivõrkude<br />
abil [GAD97], diagnostilised algoritmid [GUS98], näiteks kujunditega juhtimine [PAR01], libisemise<br />
kindlakstegemine vooluerinevuste abil vahelduvvooluajamites [WAT02], mudelipõhised regulaatorid<br />
[OHI00], hõõrdejuhtimise hübriidmeetod [PAR01], suurima gradiendi meetod [OHI98] ja<br />
hägusloogiline hõõrdejuhtimine [PAL94][HIL97]. Mõned sõiduautodel kasutatavad rataste<br />
blokeerimisvastased algoritmid [DAY02] on rakendatavad ka kergetel rööbassõidukitel. Ülevaade<br />
libisemise-, blokeerumise- ja haardejuhtimismeetoditest on toodud joonisel <strong>1.</strong>13.<br />
Libisemise<br />
juhtimismeetodid<br />
Kiiruste<br />
erinevusel<br />
põhinevad<br />
Diagnostilistel<br />
algoritmidel<br />
põhinevad<br />
Mootorite<br />
voolude<br />
erinevusel<br />
põhinevad<br />
Mudelipõhised<br />
Hägusloogilised<br />
Tehisnärvivõrkudel<br />
põhinevad<br />
Suurima<br />
gradiendi<br />
meetod<br />
Hübriidmeetod<br />
Joonis <strong>1.</strong>13 Libisemise juhtimismeetodid<br />
Rööbassõidukitel kasutatakse ka mitmesuguseid mehaanilisi hõõrdumisevastaseid süsteeme ja<br />
mitteblokeerivaid pidurisüsteeme, mida saab kasutada hõõrdumise suurendamiseks. Libisemise<br />
vältimiseks on kasutusel järgnevad süsteemid:<br />
<strong>1.</strong> Ratastest eraldi toimivate mehaaniliste pidurite (elektromagnetiliste rööpapidurite) rakendamine ja<br />
sellega hõõrdepinna suurendamine ning hõõrdetegurite ühtlustamine rataste vahel.<br />
2. Pidurdusjõu ühtlustamine rataste ja veotelgede vahel alusvankrite eraldi juhtimisega, mis<br />
võimaldab paindlikku blokeerimisvastast juhtimist<br />
3. Elektriliselt juhitavate liivatamisseadmete kasutamine hõõrdumise parandamiseks pidurdusel ja<br />
kiirendusel.<br />
<strong>1.</strong>6.3. Libisemiskontroll mitmemootorilises veoajamisüsteemis<br />
Libisemise tuvastamiseks mitmemootorilises süsteemis kasutatakse peamiselt kiiruse erinevuse<br />
kindlakstegemist. Kiirusesignaal saadakse kas otse kiirusandurilt või mootori mudelitest voolude ja<br />
pingete kaudu. Kiiruste erinevuse määramiseks saab kasutada kiiruste otsest ja kaudset võrdlemist või<br />
kiirusega seotud parameetrite võrdlemist.<br />
Eri veotelgede või veorataste kiiruste otsesel võrdlemisel kasutatakse kiiruseandureid. Tulemus ei<br />
sõltu seejuures veomootorite seisukorrast ja veoajami ülejäänud komponentidest. Kiiruste kaudsel<br />
võrdlemisel kasutatakse eraldi juhitavate ja toidetavate veomootorite mudelitest arvutatud kiirusi. Seda<br />
kasutatakse näiteks eralditoidetavate veovankrite puhul.<br />
Libisemist saab tuvastada ka kiirusega kaudselt seotud parameetrite otsese võrdlemisega. Nt<br />
alalisvoolumootorite korral kasutatakse mootorite elektromotoorjõudude võrdlemist. Vastuelektromotoorjõudude<br />
ja ankrupingete võrdlemiseks kasutatakse sildlülitust. Jadalülituses alalisvoolu<br />
veomootorite puhul (trammid ČKD Tatra KT4 ja T3/T4, rong RVR ER1, ER2, jt.) kasutatakse<br />
veorataste libisemise kindlakstegemiseks joonisel <strong>1.</strong>14 näidatud sildlülitust. See sildlülitus ei tuvasta<br />
libisemist juhul kui mõlema veomootori teljed libisevad võrdselt.<br />
33
R 2<br />
Us Rv R 1<br />
M 2 M 1<br />
Joonis <strong>1.</strong>14. Alalisvoolu veomootorite libisemisrelee lülitus<br />
Toodud sildlülituses saab andurina kasutada isoleeritud pingeandurit, kõrge mähisepingega<br />
pingereleed U s või optroniga pooljuhtreleed. Andur või relee annab signaali kui veomootorite<br />
vastuelektromotoorjõud pole võrdsed. Paralleellülituses metall-oksiid varistor R v suurendab viivitust ja<br />
vähendab impulssmuunduri ja veomootorite kommutaatorite poolt põhjustatavate kõrgsagedushäirete<br />
mõju. Kirjandusest võib leida jadalülituses alalisvoolu veomootoritega ajamisüsteemi koormuste<br />
jagunemise uuringuid [BOU03].<br />
<strong>1.</strong>6.4. ABS pidurite juhtimine<br />
Rööbassõidukite veojõukontrolli ja libisemisevastaste süsteemide ülesandeks on parandada pidurduse<br />
stabiilsust ja seega vähendada pidurdusteekonna pikkust. Libisemisvastased süsteemid aitavad<br />
vähendada veorataste kulumist ning ühtlustada eri alusvankrite ja erinevate pidurisüsteemide<br />
koormust. Ajamist mõõdetud libisemissignaali kasutatakse lisaks ka kasutajaliideses, et teavitada<br />
sõidukijuhti hõõrdetingimustest ning mitmemootorilise ajamisüsteemi talitluse diagnostikaks.<br />
Libisemissignaali saab kasutada lisaks mootorite elektrilise pidurduse juhtimisele ka<br />
elektromagnetiliste rööpapidurite ja liivaseadmete automaatjuhtimiseks. Rööbassõidukite<br />
libisemisevastased süsteemid erinevad maanteesõidukitel vastavatest süsteemidest, mille peamiseks<br />
ülesandeks on juhitavuse tagamine.<br />
Kirjanduses on toodud ülevaated blokeerimatu pidurisüsteemi juhtimismeetodite ning parameetrite<br />
kohta [DAY02], mis on kohandatavad ka rööbassõidukitele. TTÜ-s käesoleva töö autori poolt<br />
väljatöötatud lahenduse parameetrid on toodud tabelis <strong>1.</strong>5. Eri alusvankrite libisemisevastased<br />
süsteemid peavad ajamisüsteemi stabiilsuse hoidmiseks toimima kooskõlastatult.<br />
Tabel <strong>1.</strong>5 Elektriajamiga blokeerimatu pidurisüsteemi parameetrid<br />
ABS parameeter<br />
Kirjeldus<br />
Tsükli aeg Maksimaalne võimalik aeg stabiilse pidurdusjõu<br />
saavutamiseks<br />
ABS lävikiirus Libisemisevastase pidurdussüsteemi aktiveerimiseks vajalik<br />
sõiduki minimaalne kiirus<br />
Alalisvoolulüli ABS Ajamisüsteemi ja muunduri tööpiirkond milles<br />
lävipinge<br />
libisemisevastase pidurdussüsteemi kasutamine on võimalik<br />
Rakendusviivitus Veomootorite voolu suurendamise aeg<br />
Tagastusviivitus Veomootorite voolu vähendamise aeg<br />
Sisendsignaali<br />
läviväärtus<br />
Veorataste kiiruste erinevuse nivoo, millega aktiveeritakse<br />
libisemisevastane süsteem. On teostatud mitmemootorilise<br />
alalisvooluajami ankrupingete ja elektromotoorjõudude<br />
võrdlemisega<br />
Pidurdusjõu<br />
Ramp pidurdusjõu sujuvaks suurendamiseks<br />
(momendi) ramp<br />
Väljundvoolu<br />
suhteline läviväärtus<br />
Minimaalne veomootorite suhteline vool protsentides<br />
etteandevoolust libisemisevastasel pidurdusel<br />
34
<strong>1.</strong>7. Sõiduki juhtimisorganite ja kasutajaliideste areng<br />
<strong>1.</strong>7.<strong>1.</strong> Veoajamisüsteemi veo- ja pidurdusjõu seadurid<br />
Veoajamite veo- ja pidurdusjõu etteandmiseks kasutatavaid juhtseadiseid võib liigitada vastavalt<br />
manuaal- või pedaaljuhtimise liidesteks. Vastavalt juhtseadiste tüübile (käsikontroller või pedaalid)<br />
projekteeritakse kogu sõidukijuhi töökoht st. nuppude hoobade, pedaalide, lülitite, mikrofonide jms.<br />
asukohad. Pedaaljuhtimine on levinud bussidel ja trollibussidel võimaldamaks ka sõiduki roolimist.<br />
Vanematel trammidel, s.h. ČKD Tatra kiirendiga trammivagunitel on valdavalt kasutusel<br />
pedaaljuhtimine. Manuaaljuhtimise puhul piisab ühest, tavaliselt vasaku käega juhitavast juhthoovast<br />
nii kiirendamiseks kui ka pidurdamiseks. Uutel trammide puhul eelistatakse süsteemi väiksema<br />
maksumuse tõttu pedaaljuhtimisele manuaaljuhtimist. Kirjandusest võib leida kombineeritud piduri ja<br />
kiirenduspedaale [NIL00] kus kiirendus ja pidurdus on teostatav ühe pedaaliga (ja jalga pedaalilt<br />
tõstmata). Kombineeritud kiirendus-pidurduspedaalid on mitme anduri ja keerukama<br />
konstruktsiooniga kui ühefunktsioonilised pedaalid. Lisaks veo- ja pidurdusjõu reguleerimiseks<br />
kasutatavatele pedaalidele kasutatakse rööbassõidukites ka lülitit sisaldavat ohutuspedaali (dead man<br />
control) või sama funktsiooniga nupplülitit. Uutes sõidukites on raskusega allavajutatavate<br />
ohutuspedaalide asemel võetud kasutusele perioodiliselt või osalist vajutamist nõudvad<br />
ohutuspedaalid ja nupud koos hoiatava helisignaaliga. Vaguni kiirendamise ja pidurdamisega otseselt<br />
seotud süsteemidest võib nimetada veel avariipidurdussüsteemi, liivaseadmeid (liivateid),<br />
seisupidureid ning indikatsioonisüsteeme nagu stopptulesid, tagurdamis-indikatsiooni ja hoiatuskella.<br />
Sõidukitel kasutatakse depoos manööverdamiseks ka täiendavaid juhtpulte, nt trammi tagaosas<br />
paiknevat tagasisõidupulti.<br />
<strong>1.</strong>7.2. Juhtseadiste ehitus<br />
Tänapäeval kasutatakse sõiduki veo- ja pidurdusjõu etteandmiseks kontaktkontrollerite ja<br />
potentsiomeetrite asemel kontaktivabu asendiandureid. See võimaldab suurendada süsteemi<br />
töökindlust. Et tagada pidurisüsteemide sõltumatut tööd ja reserveeritavust on kasutusel ka kontaktid<br />
avarii- ja ohupidurite juhtimiseks. Ajami- ja pidurisüsteemi juhtimisorganitega on vahetult seotud ka<br />
signalisatsioonisüsteemid, nt. pidurituled, tagurdamistuled, koos ohupiduriga rakendatav hoiatuskell.<br />
Pedaalide kontaktkontrolleri kasutamisel on juhtimine astmeline, nt. erinevate veojõu<br />
etteandeväärtustega sõidurežiimid. Potentsiomeetrite ja pedaali asendiandurite kasutamisel on andurite<br />
analoogsignaali mõõtmisel AD muunduriga eristatavate asendite arv sadu kordi suurem, mistõttu<br />
sõidukijuht seaduri astmeid ei märka. Seadesuurust võib saada ka seaduri digitaalselt impulssandurilt.<br />
<strong>1.</strong>7.3. Sõidukijuhi töökoha ümberkujundamise probleemid<br />
Veoajamite rekonstrueerimisel ja üleminekul manuaaljuhtimisele (pedaaljuhtimise asemel) vajab<br />
juhtide ümberõpet. Manuaaljuhtimisele üleminek on seotud ka juhtpuldi ümbertegemisega, sest kõiki<br />
sõidul vajalikke toimingud (tulede lülitamine, helisignaal, pööranguseadmete juhtimine jms.) peab<br />
olema võimalik teostada ühe käega. Sellega kaasnevad muudatused paljude veoajami abisüsteemide ja<br />
sõiduindikatsiooniga seotud süsteemide juhtimises. Sõidukijuhi töökoha disain on otseselt seotud<br />
liiklusohutusega ja seetõttu teostatakse muudatuste puhul mitmesuguseid uuringuid, nt Austrias Viini<br />
trammipargis teostatud juhi töökoha moderniseerimine [KAI05] ja juhipultide ühtlustamine Euroopa<br />
rahvusvahelises raudteeliikluses kasutatavatel veduritel [SOR01].<br />
Ajamitüübi juhtimismeetodi muutmine on möödapääsmatu näiteks impulssjuhtimise<br />
kasutuselevõtul. Reostaatjuhtimise ja impulssjuhtimise korral erinevad ka sõiduki energiasäästlikud<br />
juhtimisvõtted. Üleminekuga kaasnevad muudatused kiirendus ja pidurdusprotsesside juhtimises.<br />
Kiirendustakistitega (reostaatjuhtimisega) trammi korral saavutatakse väiksem energiakulu juhul kui<br />
kiirendustakisti kasutamise aeg on minimaalne. Pooljuht-impulssmuunduri korral on kaod muunduris<br />
väikesed ja energiatarve sõltub sõidu sujuvusest ja rekuperatiivpidurduse kasutamisest.<br />
Erinevused juhtimises on olulised ka ajami juhtimise (nt. mootori ergutusviisi, vooluregulaatorite jms.)<br />
muutumisel. Seejuures on oluline, kas ajam on jadaergutusega või sõltumatu ergutusega. Jadaergutuse<br />
korral on nimiergutusvoolust väiksematel ja suurematel vooludel veomootori kasutegur madalam.<br />
Sama kehtib ka nimiergutusvoolust mõnevõrra suuremate voolude korral, mil veomootorite<br />
35
magnetahel on küllastuses. Sõltumatu ergutuse korral hoitakse ergutusvoolu nimiväärtusel, mis<br />
võimaldab suuremat kasutegurit väiksematel sõidukiirustel. Sõiduki sujuv kiirendamine ja<br />
pidurdamine saavutatakse impulssjuhtimisel pedaalide sujuva vajutamisega.<br />
<strong>1.</strong>7.4. Juhtpuldi indikatsioon ja signalisatsioon<br />
Ajami ja juhtimissüsteemi erinevustest tingituna on juhtpaneelidel erinevad signaallambid.<br />
Signalisatsiooniks ja indikatsiooniks kasutatakse uutes lahendustes valgusdioodlampe, numbrilisi<br />
näidikuid ja graafilisi kuvareid. Vanemates süsteemides on lisaks kasutusel ka elektromehaanilised<br />
näidikud, nt kiiruse ja läbisõidunäidik. Paljudel juhtudel on olekuindikaatoriks lüliti asend ja<br />
täiendavat signaallampi ei vajata. Ohusignalisatsiooniks kasutatakse peale hoiatuslampide mõnikord<br />
ka helisignaali.<br />
Otseselt sõiduga seotud näidikud liigitatakse põhi- e primaarseteks näidikuteks ja abisüsteemide (küte,<br />
raadioside, mitmesugused arvestid jms.) abi- e sekundaarseteks näidikuteks (vt. tabel <strong>1.</strong>7).<br />
Kontaktvõrgust toidetava veoajamiga sõiduki juhtimisega otseselt seotud nn. põhinäidikute sobiv<br />
paigutus ja omadused vastavalt nõuetele ja soovitustele [GUI04] [BEA98] on toodud tabelis <strong>1.</strong>6.<br />
Tabel <strong>1.</strong>6 Sõiduki põhinäidikud<br />
Näidik<br />
Kiirusenäidik<br />
Hoiatuslambid<br />
Elektrisüsteemi<br />
näidikud<br />
Suunatulede<br />
indikaatorid<br />
Kaugtulede<br />
indikaator<br />
Seisupidurite<br />
indikaator<br />
Liinipinge<br />
indikaator<br />
Ajami võimsuse<br />
näidik<br />
Veorataste<br />
libisemise<br />
indikaator<br />
Selgitus<br />
Kergesti jälgitav näidik kiiruse hõlpsaks piiramiseks vastavalt<br />
liiklusoludele. Sõidukiiruse näidik paigutatakse otse juhi ette<br />
Olulisemad signaallambid paiknevad otse juhi ees. Nendeks on ka<br />
veoajami ja pidurisüsteemi rikkeindikaatorid ja mõned veoajami<br />
olekuindikaatorid (sisendlüliti, veasignaalid, veomootorite ergutus<br />
vms.). Seisupidurite oleku ja süsteemide rikkeindikaatorite jaoks<br />
kasutatakse punaseid signaallampe. Koos lampidega või<br />
hoiatuslampide asemel kasutatakse ka hoiatussignaale<br />
Näidikud võimaldavad jälgida elektrisüsteemi, sh akupatarei,<br />
seisundit, et rikke tekkimisel saaks seda operatiivselt kõrvaldada.<br />
Näitavad suunatulede olekut<br />
Indikaator näitab sõidutulede olekut. Kaugtule indikaatorina<br />
kasutatakse sinist signaallampi<br />
Indikaator näitab seisupidurite ja teiste pidurisüsteemide olekut ja<br />
töövalmidust<br />
Indikaator näitab kontaktliinipinge olemasolu. Täiendavalt<br />
kasutatakse ajami valmisolekut näitavaid signaallampe. Need<br />
annavad infot toitepinge olemasolust, ajami ja muunduri olekutest<br />
ning sõidutalitluse ja elektrodünaamiline pidurdustalitluse<br />
võimalikkusest<br />
Mõõteriist, mis näitab võimsust ja selle suunda, sh. võimsuse<br />
tarbimist või regenereerimist pidurdustakistisse ja kontaktvõrku.<br />
Kui võimsuse täpset näitu ei vajata, võidakse vähe muutuva pinge<br />
korral kasutada võimsuse ja selle suuna näidikuna ampermeetrit.<br />
Muutuva liinipinge korral ei anna ampermeeter täpset infot<br />
võimsuse kohta<br />
Libisemise kaitsesüsteemi signaallamp annab lisainfot alusvankri<br />
rattapaaride libisemise kohta ja ABS süsteemi töö kohta<br />
36
Tabel <strong>1.</strong>7 Veoajamiga seotud abinäidikud<br />
Näidik<br />
Elektrienergia<br />
arvestid<br />
Läbisõidu<br />
arvesti<br />
Rekuperatiivpidurduse<br />
indikaator<br />
Termomeetrid<br />
Selgitus<br />
Ajami sisendis paiknevate voolu ja pingeandurite abil arvestatakse<br />
nii tarbitud kui ka kontaktvõrku tagastatud elektrienergiat<br />
Läbisõidu arvestus toimub veoajami tagasiside jaoks kasutatavate<br />
impulssandurite abil<br />
Täiendavad signaallambid võimaldavad juhil sõita väiksema<br />
energiakuluga andes infot rekuperatiivpidurduse võimalikkuse või<br />
sobivuse kohta, veorataste libisemise ja teeolude, liinipinge<br />
seisundi ja erinevate mehaaniliste pidurisüsteemide oleku kohta<br />
Mõõteriistad näitavad sõiduki sise- ja välistemperatuuri ning<br />
hoiatavad muundurite jt. oluliste seadmete kriitilisest temperatuurist<br />
<strong>1.</strong>7.5. Taktiilse jõutagasisidega juhtimisseadmed<br />
Taktiilne jõutagasiside (Haptic Feedback) võimaldab juhil paremini tunnetada sõiduki reaktsiooni<br />
tema poolt antud juhtsignaalidele. Vastujõudu arendav seade võimaldab operaatoril (sõidukijuhil)<br />
tunda andurite poolt ajamis mõõdetavaid jõudusid [HUS99]. Tagasiside võib kajastada erinevaid<br />
mõjusid nagu – rataste libisemine, ohuolukord vms. Taktiilse jõutagasisidega veoajami struktuur on<br />
toodud joonisel <strong>1.</strong>15.<br />
E lektersõiduki juhtimisssüsteem<br />
S õid uki<br />
ju ht<br />
Taktiilse tagasisidega elektrom ehaan ilin e pedaal<br />
P ed aal,<br />
(rool),<br />
vms.<br />
Taktiiltäitu<br />
r<br />
A send i ja jõ u<br />
and u rid<br />
Täituri<br />
ju htimine<br />
Juh tim iselektroon<br />
ika<br />
Juhtimissiin<br />
M ikrokontroller<br />
Hald u s ja<br />
talitlu s-<br />
järelvalve<br />
S õid u,<br />
pidu rd use ja<br />
roolimise<br />
ju htimine<br />
E lektromehaan<br />
ilised<br />
and urid<br />
M eh aan iline<br />
ü lekann e<br />
vm s.<br />
Sõ idu ki<br />
liikum in e<br />
(koormus)<br />
V aru<br />
juh tim isseadm<br />
ed<br />
Täiturite<br />
ju htimine<br />
Jõu -pooljuh t<br />
lü litid<br />
E lektrilised<br />
täitu rid<br />
E lectriline<br />
Toide 1<br />
M adalapingeline ja väikese võimsuseline toide<br />
E lektriline<br />
Toide 2<br />
Suure võimsusega toide<br />
Joonis <strong>1.</strong>15 Peamised signaalivood taktiilse tagasisidega ja<br />
juhtmete kaudu juhitavas juhtimissüsteemis<br />
Autodel ja rööbassõidukitel on kasutusele võetud sõiduabisüsteemid. Firma Continental Temic ACDIS<br />
süsteem kasutab juhi hoiatamiseks vibraatoriga pedaali. Vibraator rakendatakse tööle ohuolukorra<br />
tuvastamisel andurite poolt. Pikivahe hoidmise süsteeme on sõidukitel rakendatud ka firma BMW<br />
poolt [SCH00]. Toodud süsteemide eesmärgiks on kokkupõrgete vältimine. Jõu tagasisidet pedaalile<br />
saab kasutada ka rataste libisemise jälgimiseks pidurdusel. Blokeerumatud pidurisüsteemid väljastavad<br />
töölerakendumisel jõu tagasiside abil signaali sõidukijuhile. Pidurdusabisüsteemi kasutamine<br />
võimaldab sõidukijuhil paremini tunnetada rataste poolt tegelikkuses arendatavat pidurdusjõudu.<br />
Üldnõudeid rööbassõidukite juhtimisseadistele ja pidurite juhtimisliidestele on kirjeldatud standardites<br />
[IEEE1475]. Sõidukite juhipaneeli näidikuid käsitleb standard [SAEJ1138] (SAE 1998f). Probleemiks<br />
on see, et uute süsteemide väljatöötamisel on vaja tagada uute põhimõtete ühilduvus olemasolevate<br />
kasutajaliidestega.<br />
<strong>1.</strong>8. Sõiduki pardatoite- ja andmesidevõrk<br />
<strong>1.</strong>8.<strong>1.</strong> Veoajami süsteemide ja abiseadmete elektritoide<br />
Pardatoitevõrgu ülesanne on pardasüsteemidele varustamine madalapingelise toitevooluga. Sealhulgas<br />
tagatakse ohutuskriitiliste süsteemide, nagu veoajam ja pidurisüsteemid katkematu toide. Et<br />
ohutuskriitilised süsteemid toimiks rikete korral sõltumatult, peab nende toide olema reserveeritud.<br />
Seetõttu on ohutuskriitilistel süsteemidel ka eraldi täiturid, kaitsmed ja ühendusjuhtmed. Elektromehaanilistel<br />
piduritel on reserveerimiseks eraldi toitejuhtmed ja kaitseahelad. Pidurite ja nende<br />
37
juhtimissüsteemide, sh veoajami juhtimissüsteemi, katkematu toide tagatakse akuga. Sõiduki sees on<br />
tarvitite toiteks kasutusel ohutu alalispinge (nt. 24V, 48V, 72V või 110V). Akut laetakse kontaktliinist<br />
abitoitemuunduri kaudu.<br />
Üldjuhul kasutatakse abisüsteemide toiteks nt. aku laadimiseks kontaktliinist ja pinge muundamiseks,<br />
eraldi pardatoitemuundurit, kuid mõnedes süsteemides on pardatoitemuundur integreeritud veoajamiga<br />
üheks tervikuks [MES01].<br />
Veoajami<br />
toide<br />
veomootorid<br />
Madalapingeline katkematu toite süsteem<br />
U n ±30%<br />
≈<br />
3 faasiline<br />
reguleeritav<br />
koormus<br />
(ventilaatorid)<br />
Alalisvoolu veomootorite<br />
pidurdusergutuse toide<br />
Muud koormused<br />
(küttekehad jms.)<br />
Stabiliseeritud<br />
alalispinge 24V<br />
Jõupooljuhtmoodulite<br />
omatoide,<br />
CAN-andmesidesiini<br />
toide jms.<br />
≈<br />
Stabiliseeritud<br />
vahelduvpinge 230V<br />
Väikese võimsuselised<br />
ühefaasilised<br />
koormused (jahutusventilaatoid<br />
vms.)<br />
Muud<br />
madalapingelised<br />
koormused (pidurid,<br />
tuled, signalisatsioon<br />
jms.)<br />
Stabiliseeritud pinge<br />
+5V, +15V<br />
Mikroprotsessor<br />
juhtimisplokk<br />
(sisaldab +3V<br />
toiteallikat)<br />
Joonis <strong>1.</strong>16. Veoajami, omatarbe ja abiahelate toitesüsteemi struktuur<br />
Süsteemi kaitseahelad on paigutatud selliselt, et olulisi ahelaid saaks reserveerida. Seetõttu kasutatakse<br />
vaguni pidurite, uste, avariivalgustuse ja juhtahelatel eraldi kaitseaparaate ning toitejuhtmeid.<br />
<strong>1.</strong>8.2. Veoajamite ja abiseadmete vaheline andmeside<br />
Andmesidevõrkudele esitatavate nõuete kohaselt vajatakse erinevate omadustega võrke. Sõidukites<br />
kasutatakse erinevate funktsioonide ja protokollidega, erineva leviulatuse, andmeedastuskiiruse,<br />
andmehulga jt. parameetritega andmesidevõrke.<br />
Sõidukite pardasüsteemide vahelisi andmesidevõrke võib jagada vastavalt neile esitatavatele nõuetele<br />
alljärgnevalt [HAD00]:<br />
<strong>1.</strong> Ajamite haldusvõrk – ajamite, pidurite, ABS süsteemide, abitoitemuundurite jt.<br />
juhtimissüsteemide haldusvõrk.<br />
2. Parda juhtimisvõrk – uste, kliimaseadmete, valgustuse jt. juhtimisssüsteemide haldusvõrk.<br />
3. Multimeediavõrk – navigatsioonisüsteemide, kaamerate, audio ja videosüsteemide, audio<br />
vastuvõtjate, võimendite, sõiduinfopaneelide, mobiiltelefonide jt. multimeediasüsteemide võrk.<br />
Multimeediavõrk täiendab ka juhtimis-, telekontrolli- ja diagnostikasüsteeme.<br />
4. Juhtmete kaudu juhitavad süsteemide jaoks (X-by wire) kasutatakse ohutusnõuete tõttu<br />
eraldiseisvat arvutivõrku. Sellega ühendatakse sõiduki juhtimisorganid nt. pedaalide ja pidurite<br />
juhtimisplokid.<br />
Kõigil nendel võrkudel võib olla alamvõrke, mis toimivad vaid mingi ühe süsteemi siseselt.<br />
Alamvõrkudes kasutatakse tavaliselt lihtsat ülem- ja alamseadmete vahelist infovahetust. Juhtme<br />
kaudu juhitavate süsteemide võrgud, mis on seotud sõiduki juhtimisorganitega (pedaalide ja<br />
käsikontrolleritega), vajavad kiiret reaalajanõuetele vastavat andmesidet. Sõidukite jaoks on seetõttu<br />
kasutusel eriotstarbelised võrgud nagu Time-Triggered Protocol (TTP) ja Train Communication<br />
Network (TCN). Kasutatakse ka eraldi toimivat kiiretoimelist CAN võrku. TCN võrgu eesmärk on<br />
siduda erinevaid vaguneid rongis ühte võrku kui sama vaguni siseselt kasutatakse CAN võrku.<br />
Võrkude põhiomadused [HAD00] on andmeedastuskiirus, protokolli toimemehhanism, töökindlus,<br />
veakindlus ja süsteemi maksumus. Sõidukites kasutatavatele võrkude puhul esitatakse täiendavaid<br />
nõudmisi võrgu ehitusele ja protokollidele [LEE02]. Nendeks nõueteks on:<br />
<strong>1.</strong> Süsteemi täiuslikkus, mis tähendab et tuvastamata vea esinemise tõenäosus peab olema tühine<br />
võrreldes sõiduki elueaga.<br />
38
2. Infosüsteemi määratletus tähendab, et juhtimiseks kasutatava teate edastamise aja ülemine piir<br />
peab olema määratud (CAN puhul saab seda määrata vaid kõrgeima prioriteediga teate puhul).<br />
3. Elektromagnetilise ühilduvuse nõue kehtestab juhtivus- ja kiirgusemissiooni ning häiretundlikkuse<br />
piirangud.<br />
4. Ühenduste kompaktsuse, töökindluse ja ühilduvuse nõuded on veeremil paiknevate<br />
elektroonikaseadmete puhul karmimate talitlusolude tõttu rangemad kui tavaliste<br />
elektroonikaseadmete puhul.<br />
5. Võrgu moodulehituse ja uuendatavuse nõue peab võimaldama võrguseadmete vahetamist võrgu<br />
tervikkonfiguratsiooni rikkumata.<br />
Veomuundurite juhtimissüsteemidelt nõutakse suurt arvutusjõudlust, ühilduvust, vastupidavust<br />
keskkonnatingimustele jms. Veomuunduri juhtimissüsteemis kasutatakse üldjuhul eriotstarbelist<br />
kontrollerit, mille programmeerimiseks, sh. andmesideprotokolli (nt. CAN) realiseerimiseks,<br />
kasutatakse standardiseeritud programmeerimiskeeli, nt. C. CAN-i puhul on tegemist riistvaraliselt<br />
teostatud protokolliga, mis lihtsustab tarkvara ülesehitust.<br />
Tööstuses ja transpordis kasutatavad tuntumad võrgud on Profibus, Ethernet, CAN, CANopen,<br />
Interbus. CAN võrgu kasutamise eelised [HAD00] elektertranspordis võib kokku võtta järgnevas.<br />
CAN on väljakujunenud standard. CAN protokoll on olnud kasutusel alates 1986.a. Seetõttu on turul<br />
palju CAN põhiseid tooteid. CAN protokolli riistvaraline teostus võimaldab veatöötlust ja<br />
veaparandusvahendite kasutamist suure edastuskiiruse juures. Füüsilise andmeedastuskeskkonnana<br />
kasutatakse tavaliselt juhtmete keerupaari, kuid CAN võib üldise massiga seotult töötada ka üheainsa<br />
juhtme kaudu. CAN võrgus on suurepärane veatöötlus. Praktiliste eelisena võib lisada veel elektrilise<br />
isoleerimise võimalust optronite ja kiudoptika abil ning toitepinge olemasolu võrgus. CAN võrgu<br />
puudusteks võib lugeda asjaolu, et teate edastamiseks kuluv aeg pole täpselt määratud, edastusaeg<br />
halvima juhtumi korral ja edastuskiiruse värelus pole teada, prioriteedi- ja sündmustepõhise süsteemi<br />
projekteerimine on keerukas. Veakindlate elemente kordamise plaani (algoritmi, järjekorda) pole<br />
võimalik määrata ja saatmise käigus muuta, sest veakontroll on teostatud riistvaraliselt ja teadete<br />
saatmise järjekord on prioriteedipõhine. Kriitilisemate funktsioonide jaoks kasutatakse kõrgema<br />
prioriteediga teateid.<br />
Pedaalid ja<br />
juhtpaneel<br />
Pedaalid ja<br />
juhtpaneel<br />
Pedaalid ja<br />
juhtpaneel<br />
tagurpidisõidu<br />
paneel<br />
tagurpidisõidu<br />
paneel<br />
tagurpidisõidu<br />
paneel<br />
…<br />
…<br />
Viimase haagisvaguni<br />
ajami<br />
pooljuhtm uundur<br />
(alluvseade)<br />
I Haagisvaguni<br />
ajami<br />
pooljuhtm uundur<br />
(alluvseade)<br />
Juhtvaguni<br />
ajami<br />
pooljuhtmuundur<br />
(ülemseade)<br />
CAN<br />
CAN<br />
CAN<br />
Vagunite vahelised liidesed<br />
Elektriline CAN diferentsiaalsiin kuni 125 Kbit/s<br />
Joonis <strong>1.</strong>17 Veoajami pooljuhtmuundurite sidumine rongiks<br />
ühendatud trammivagunite korral<br />
Mõned trammide elektroonikaseadmeid tootvad firmad on välja töötanud oma multifunktsionaalse<br />
andmesidesüsteemi. Üheks selliseks on Kiepe BISS (Bordinformations- und Steuer-System)<br />
[8NGTW], mis ühendab sõiduki alamsüsteemide juhtimise, alamsüsteemide integreeritud diagnostika<br />
ja veaindikatsiooni. Teise põlvkonna Kiepe BISS põhineb rahvusvaheliselt standardiseeritud<br />
39
CANopen protokollil [RUE02] ja võimaldab juhtida kuni neljast sõidukist koosnevaid ronge (joonis<br />
<strong>1.</strong>17).<br />
Toodud struktuuri kasutatakse veoajamite töö kooskõlastamiseks, st. veomomentide ja kiiruste<br />
ühtlustamiseks erinevate vagunite ning erinevate veotelgede vahel. Samuti võimaldab antud süsteem<br />
tagasisidet ajamite ja muundurite olekutest ja vigadest sõidukijuhi puldile. Rongiks ühendatud<br />
vagunite veoajamite vahelised füüsilised ühendused sõltuvad andmesideliidese tüübist ja ehitusest.<br />
Kasutatakse kas elektrilisel juhtmete keerupaaril või kiudoptilisel valgusjuhil põhinevat võrku koos<br />
vahevõimendite ja vajalike eraldustega. Paralleelselt on kasutuses elektriline siin pidurite ja muude<br />
kriitilisemate funktsioonide dubleerimiseks relee-kontaktorjuhtimisega. Vagunitevahelisteks<br />
ühendusteks kasutatakse elektrilise siini korral pistikühendustega juhtmesildasid, või automaatsete<br />
kontaktpuhvrite klemme. Võimalik on kasutada ka infrapunasignaaliga optilist liidest, raadiosidet või<br />
elektromagnetilist sidestust trafodega. Kahesuunaliste vahevõimendite toiteks saab kasutada<br />
vagunisiseses CAN võrgus olemasolevat toitepinget.<br />
40