

Simulering af musklers strækrefleks 1 Introduktion
Simulering af musklers strækrefleks 1 Introduktion
Simulering af musklers strækrefleks 1 Introduktion

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
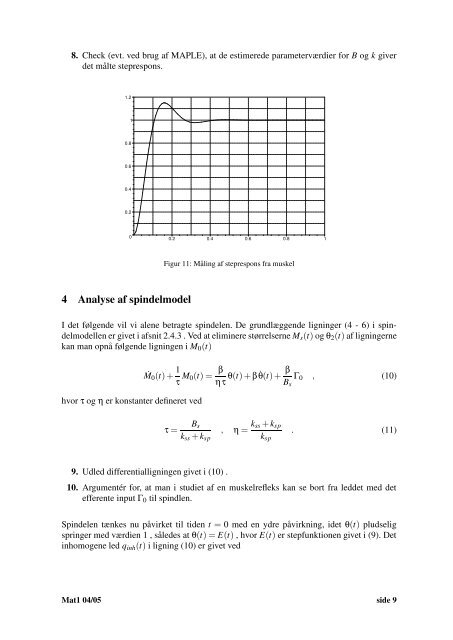
8. Check (evt. ved brug <strong>af</strong> MAPLE), at de estimerede parameterværdier for B og k giver<br />
det målte steprespons.<br />
1.2<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
4 Analyse <strong>af</strong> spindelmodel<br />
1<br />
0<br />
0.2 0.4 0.6 0.8 1<br />
Figur 11: Måling <strong>af</strong> steprespons fra muskel<br />
I det følgende vil vi alene betragte spindelen. De grundlæggende ligninger (4 - 6) i spindelmodellen<br />
er givet i <strong>af</strong>snit 2.4.3 . Ved at eliminere størrelserne Ms(t) og θ2(t) <strong>af</strong> ligningerne<br />
kan man opnå følgende ligningen i M0(t)<br />
hvor τ og η er konstanter defineret ved<br />
˙M0(t) + 1<br />
τ M0(t) = β<br />
ητ θ(t) + β ˙θ(t) + β<br />
τ =<br />
Bs<br />
kss + ksp<br />
9. Udled differentialligningen givet i (10) .<br />
, η = kss + ksp<br />
ksp<br />
Bs<br />
Γ0 , (10)<br />
. (11)<br />
10. Argumentér for, at man i studiet <strong>af</strong> en muskelrefleks kan se bort fra leddet med det<br />
efferente input Γ0 til spindlen.<br />
Spindelen tænkes nu påvirket til tiden t = 0 med en ydre påvirkning, idet θ(t) pludselig<br />
springer med værdien 1 , således at θ(t) = E(t) , hvor E(t) er stepfunktionen givet i (9). Det<br />
inhomogene led qinh(t) i ligning (10) er givet ved<br />
Mat1 04/05 side 9














