

Zustandsraumdarstellung n'ter Ordnung
Zustandsraumdarstellung n'ter Ordnung
Zustandsraumdarstellung n'ter Ordnung

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
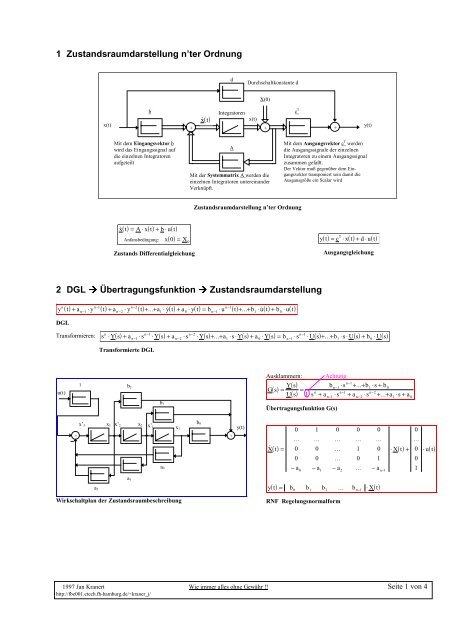
1 <strong>Zustandsraumdarstellung</strong> n’ter <strong>Ordnung</strong><br />
d<br />
b<br />
Integratoren<br />
xt ()<br />
x(t)<br />
x(t) y(t)<br />
+ + +<br />
Mit dem Eingangsvektor b<br />
wird das Eingangssignal auf<br />
die einzelnen Integratoren<br />
aufgeteilt<br />
xt () = A⋅ xt () + b⋅ut ()<br />
x(<br />
) = X<br />
Anfansbedingung: 0 0<br />
Zustands Differentialgleichung<br />
A<br />
1997 Jan Kranert Wie immer alles ohne Gewähr !! Seite 1 von 4<br />
http://fbe001.etech.fh-hamburg.de/~kraner_j/<br />
X(0)<br />
Mit der Systemmatrix A werden die<br />
einzelnen Integratoren untereinander<br />
Verknüpft.<br />
Durchschaltkonstante d<br />
<strong>Zustandsraumdarstellung</strong> n’ter <strong>Ordnung</strong><br />
2 DGL Übertragungsfunktion <strong>Zustandsraumdarstellung</strong><br />
n<br />
n−1<br />
n−2<br />
n−1<br />
y () t + a ⋅ y () t + a ⋅ y () t + ... + a ⋅ y() t + a ⋅ y() t = b ⋅ u () t + ... + b ⋅ u() t + b ⋅u()<br />
t<br />
DGL<br />
n−1<br />
n−2<br />
1 0 n−1<br />
1 0<br />
c T<br />
Mit dem Ausgangsvektor c T werden<br />
die Ausgangssignale der einzelnen<br />
Integratoren zu einem Ausgangssignal<br />
zusammen gefaßt.<br />
Der Vektor muß gegenüber dem Eingangsvektor<br />
transponiert sein damit die<br />
Ausgansgröße ein Scalar wird<br />
T<br />
yt () = c ⋅ xt () + d⋅ ut ()<br />
Ausgangsgleichung<br />
n<br />
n−1<br />
n−2<br />
n−1<br />
Transformieren: s ⋅ Y( s) + a ⋅s ⋅ Y( s) + a ⋅s ⋅ Y( s) + ... + a ⋅s⋅ Y( s) + a ⋅ Y( s) = b ⋅s ⋅ U( s) + ... + b ⋅s⋅ U( s) + b ⋅U(<br />
s)<br />
u(t)<br />
+<br />
1<br />
x’3<br />
a2<br />
n−1<br />
Transformierte DGL<br />
x3<br />
x’2<br />
b2<br />
a1<br />
x2<br />
x’1<br />
b1<br />
a0<br />
n−2<br />
Wirkschaltplan der Zustandsraumbeschreibung<br />
x1<br />
b0<br />
1 0 n−1<br />
+<br />
y(t)<br />
1 0<br />
Ausklammern: Achtung<br />
n−1<br />
Ys ( ) bn−1⋅ s + ... + b1⋅ s+ b0<br />
Gs ( ) = = n<br />
n−1<br />
n−<br />
2<br />
Us ( ) 1⋅<br />
s + a ⋅ s + a ⋅ s + ... + a ⋅ s+ a<br />
n−1<br />
Übertragungsfunktion G(s)<br />
n−2<br />
1 0<br />
0 1 0 0 0<br />
0<br />
... ... ... ... ... ...<br />
Xt () = 0 0 ... 1 0 ⋅ Xt () + 0 ⋅ut<br />
()<br />
0 0 ... 0 1<br />
0<br />
−a −a −a ... −a<br />
1<br />
0 1 2 n−1<br />
yt () = b b b ... b ⋅Xt<br />
()<br />
0 1 2 n−1<br />
RNF Regelungsnormalform
3 Übertragungsglieder<br />
3.1 I-Glied<br />
Symbol Übertragun<br />
gsfunktion<br />
Gs ( )<br />
=<br />
K I<br />
s<br />
Betragsgang Phasengang Bodediagramm<br />
( ω)<br />
Gj<br />
3.2 PT1-Glied<br />
Symbol Übertragungsfunktion Betragsgang<br />
Phasengang<br />
Gs ()<br />
K P<br />
=<br />
1 + Ts<br />
3.3 PTt-Glied<br />
Symbol Übertragungsfunktion<br />
()<br />
Gs e Ts t = −<br />
=<br />
K I<br />
ω<br />
( ω)<br />
Gj<br />
ϕ(jω) = -90° ω=KI<br />
K P<br />
=<br />
2<br />
1 + ( Tω)<br />
( j ) =−arctan ( T )<br />
ϕ ω ω<br />
3.4 PT2-Glied<br />
Symbol Übertragungsfunktion Betragsgang<br />
Phasengang<br />
0 < ϑ < ∞<br />
ϑ = 1<br />
Gs ( )<br />
( ω)<br />
Gj<br />
K P<br />
=<br />
1+ 2ϑTs<br />
+ T s<br />
K P<br />
= 2<br />
1 + ( Tω)<br />
Pole : 1<br />
2<br />
s12<br />
, = [ − ϑ± ϑ −1]<br />
h(t)<br />
1<br />
-1/T1 -1/T2<br />
T<br />
ϑ > 1<br />
Im<br />
Re<br />
t<br />
2 2<br />
( ω)<br />
Gj<br />
=<br />
K P<br />
2 [ 1− ( Tω) ] + 4(<br />
ϑTω) 2<br />
− 2ϑTω<br />
ϕ( jω)<br />
= arctan<br />
2 <br />
1−<br />
( Tω)<br />
( j ) =−2arctan ( T )<br />
ϕ ω ω<br />
h(t)<br />
1<br />
-1/T<br />
ϑ > 1<br />
-20dB/dek<br />
Seite 2 von 4 Wie immer alles ohne Gewähr !! 1997 Jan Kranert<br />
http://fbe001.etech.fh-hamburg.de/~kraner_j/<br />
⏐G(ω) ⏐<br />
ω = 1<br />
⏐G(ω) ⏐<br />
-20dB/dek<br />
KI [dB]<br />
ω= 1<br />
T<br />
Betragsgang Phasengang<br />
Gjω ( ) =1 ( )<br />
2<br />
( ω)<br />
Gj<br />
=<br />
⏐G(ω) ⏐<br />
ϕ jω =− Ttω -40dB/dek<br />
K<br />
ω= 1<br />
T<br />
ω<br />
Bodediagramm<br />
ω<br />
0°<br />
-45°<br />
-90°<br />
Bodediagramm<br />
ω<br />
0°<br />
-90°<br />
-180°<br />
ϕ(ω)<br />
ϕ(ω)<br />
ϕ(ω)<br />
-90°<br />
ω= 1<br />
T<br />
ω= 1<br />
T<br />
P<br />
2<br />
2 ϕ( jω) =−arctan( T1ω) −arctan(<br />
T2ω)<br />
[ 1+ ( T1ω) ] [ 1+<br />
( T2ω)<br />
]<br />
ϑ = 1 ϑ < 1 ϑ = 0<br />
Im<br />
Doppelpol<br />
Re<br />
t<br />
h(t)<br />
1<br />
-1/T<br />
Im<br />
1 2<br />
1 −ϑ<br />
T<br />
Re<br />
1<br />
− 1−ϑ<br />
T<br />
2<br />
t<br />
h(t)<br />
1<br />
j<br />
T<br />
− j<br />
T<br />
Im<br />
Re<br />
t<br />
ω<br />
ω<br />
ω
3.5 PI-Glied<br />
Symbol Übertragungsfunktion Betragsgang<br />
Phasengang<br />
K I<br />
Gs () = KR<br />
+<br />
s<br />
K I<br />
= ( 1+<br />
Ts N )<br />
s<br />
K R<br />
Gs () = ( 1+<br />
Ts N )<br />
Ts N<br />
K R<br />
TN<br />
=<br />
K I<br />
3.6 PDTR-Glied<br />
2<br />
2 K I<br />
Gj ( ω)<br />
= KR<br />
+ <br />
ω<br />
K I<br />
2<br />
= ( TNω<br />
) + 1<br />
ω<br />
1<br />
ϕ( jω)<br />
=−arctan <br />
TNω<br />
= arctan(<br />
TNω<br />
) − 90°<br />
Symbol Übertragungsfunktion Betragsgang<br />
Phasengang<br />
Gs ( )<br />
K K s<br />
Ts<br />
K K<br />
Ts K s<br />
R + D<br />
=<br />
1+<br />
R<br />
R<br />
D<br />
= 1+ <br />
1+<br />
R<br />
R<br />
( ω)<br />
Gj<br />
=<br />
= K<br />
+ ( ω)<br />
2<br />
( T ω)<br />
2<br />
K K<br />
R<br />
R D<br />
1+<br />
R<br />
K D<br />
1+<br />
ω<br />
K R<br />
2<br />
1+<br />
( T ω)<br />
K<br />
ϕ ω ω Rω<br />
K<br />
D<br />
( j ) = arctan − arctan(<br />
T )<br />
R<br />
-20dB/dek<br />
Bodediagramm<br />
1997 Jan Kranert Wie immer alles ohne Gewähr !! Seite 3 von 4<br />
http://fbe001.etech.fh-hamburg.de/~kraner_j/<br />
R<br />
2<br />
2<br />
⏐G(ω) ⏐<br />
KR<br />
ω= 1<br />
T N<br />
KI * KR<br />
⏐G(ω) ⏐<br />
KR<br />
ω<br />
0°<br />
-45°<br />
-90°<br />
ϕ(ω)<br />
Bodediagramm<br />
K<br />
T<br />
D<br />
R<br />
ω= 1<br />
T R<br />
-20dB/dek<br />
ω= 1<br />
T<br />
ω= K<br />
K<br />
Wird das PDTR-Glied als Regler verwendet sollte TR sehr viel kleiner als dir kleinste Zeitkonstante der Strecke sein: T ≈ T<br />
1<br />
10<br />
3.7 PIDTR-Glied<br />
Symbol<br />
Übertragungsfunktion<br />
Betragsgang<br />
Phasengang<br />
Bodediagramm<br />
D<br />
R<br />
ω<br />
R min( strecke )<br />
K<br />
Gs ( ) K K s<br />
s<br />
Ts<br />
K K K<br />
s<br />
s( T s)<br />
K K s<br />
I<br />
1<br />
= R + + D ⋅<br />
1+<br />
R<br />
I R D 2<br />
= 1+<br />
+ <br />
1+<br />
R<br />
I I<br />
2<br />
2 K I<br />
KR + KDω− <br />
ω<br />
Gj ( ω)<br />
=<br />
2<br />
1+<br />
( TRω<br />
)<br />
K D K I<br />
ϕ( jω)<br />
= arctan ω−<br />
− arctan(<br />
TRω<br />
)<br />
K R K Rω<br />
ω= K<br />
K D<br />
⏐G(ω) ⏐<br />
TR<br />
KDKI 1<br />
ω=<br />
KDKI I<br />
K D<br />
Wird das PIDTR-Glied als Regler verwendet, sollte TR sehr viel kleiner als dir kleinste Zeitkonstante der Strecke sein: T ≈ T<br />
1<br />
10<br />
4 Hurwitz<br />
Maßgebend für das Hurwitzkriterium ist das Nennerpolynom des geschlossenen Regelkreises.<br />
Ist das Hurwitzkriterium erfüllt, kann der Regelkreis als stabil angesehen werden.<br />
Alle Koeffizienten des Nennerpolynoms müssen größer als Null sein.<br />
Zusätzlich: Bei dritter <strong>Ordnung</strong>: aa 1 2− aa 0 3> 0<br />
Bei vierter <strong>Ordnung</strong>: aa 3 2− aa 1 4> 0<br />
2 2<br />
aaa 3 2 1−aa 0 3−<br />
aa 4 1 ><br />
0<br />
ω<br />
ω= K K<br />
D I<br />
R min( strecke )<br />
ω
5 Reglersynthese<br />
5.1 Statische Genauigkeit<br />
Die statische Genauigkeit hängt von dem I-Verhalten des offenen Kreises und der Eingangsgröße ab.<br />
Das I-Verhalten des Kreises läßt sich aus folgender Form ablesen:<br />
2<br />
K 1+<br />
as 1 + as 2 + ... + ams GO( s)<br />
= l ⋅<br />
2<br />
s 1+<br />
bs+ bs + ... + b s<br />
1 2<br />
m<br />
n −1<br />
n −1<br />
⋅ e<br />
−<br />
Ts<br />
t<br />
Für den Endwert der Regelabweichung bei Führungs- oder Störgrößenanregung ergibt sich:<br />
et () et ()<br />
=<br />
wt () zt ()<br />
Proportionales<br />
Verhalten<br />
Integrales<br />
Verhalten<br />
Doppelt Integrales<br />
Verhalten<br />
Sprung<br />
1<br />
1+ K0<br />
0<br />
0<br />
Rampe<br />
∞<br />
1<br />
0<br />
Parabel<br />
∞<br />
Seite 4 von 4 Wie immer alles ohne Gewähr !! 1997 Jan Kranert<br />
http://fbe001.etech.fh-hamburg.de/~kraner_j/<br />
K 0<br />
(K 0 = Verstärkung des offenen Kreises)<br />
5.2 Kompensationsverfahren<br />
Mit Hilfe bestimmter Reglertypen lassen sich die Pole der Regelstrecke kompensieren („wegkürzen“).<br />
Kompensiert wird natürlich der offene Regelkreis.<br />
Die Nullstelle eines PDTR-Regelgliedes kann einen Pol der Regelstrecke kompensieren:<br />
K K<br />
Ts K s<br />
R<br />
D KP<br />
KRKP 1+ ⋅ =<br />
1+<br />
1+ Ts 1+<br />
Ts<br />
R<br />
R<br />
1<br />
R<br />
∞<br />
K<br />
wenn T R =<br />
K<br />
Die beiden Nullstellen eines PIDTR-Regelgliedes können zwei Pole der Strecke kompensieren:<br />
s<br />
K K K<br />
s<br />
T s<br />
K s<br />
K<br />
T K<br />
I<br />
R D 2<br />
1+ + ⋅<br />
+ R<br />
+<br />
R<br />
2 KD<br />
wenn: 2ϑ<br />
1 = und T1<br />
=<br />
K<br />
K<br />
KK<br />
2 2<br />
( 1+<br />
) KI I 1 2ϑTs 1 T1 s s( 1 + T s)<br />
I<br />
I<br />
=<br />
D<br />
R<br />
P I P<br />
R<br />
5.3 Vorgabe der Phasenreserve ΨR<br />
Die Phasenreserve ist die Differenz der Phase des offenen Kreises zu 180° bei ωD (Durchtrittskreisfrequenz), der Frequenz<br />
bei der der Betragsgang gleich 1 wird.<br />
Die Dimensionierung des Regelkreises bei vorgegebener Phasenreserve ΨR wird in den folgenden Schritten durchgeführt:<br />
!<br />
ϕ ω = ϕ ω + ϕ ω = Ψ − 180 °<br />
1. Berechnung der Durchtrittskreisfrequenz aus gegebenem Phasenwinkel: O( D) R( D) S( D) R<br />
G ( jw ) G ( jw ) G ( jw )<br />
2. Berechnung der Verstärkung, meist KI oder KR, damit die Verstärkung<br />
des offenen Kreises bei ωD gleich 1 wird:<br />
Zusätzlich bei PI-Regler: meist ist TN = 10<br />
ω<br />
D<br />
0 Proportionales Verhalten<br />
für dir Konstante l gilt: 1 Integrales Verhalten<br />
2 Doppelt Integrales Verhalten<br />
gefordert. Daraus folgt der konstante Phasenwinkel des Reglers: ϕ ( ω )<br />
1<br />
K 0<br />
= + =1<br />
!<br />
O D R D S D<br />
R D =− 5, 711°














