SERVOMOTOREN
SERVOMOTOREN
SERVOMOTOREN

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4<br />
Anbauten<br />
4/2<br />
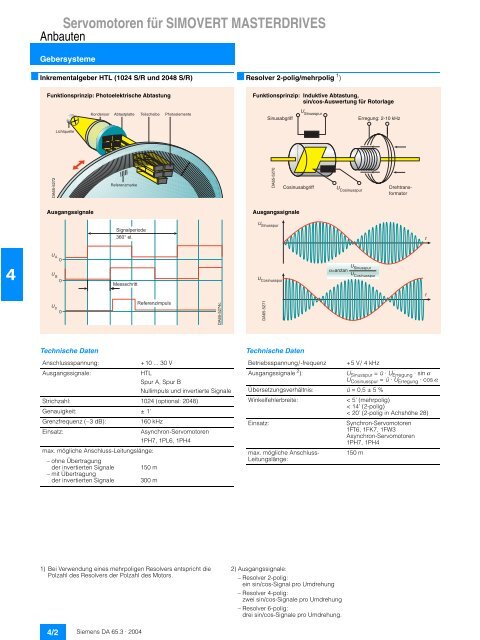
Servomotoren für SIMOVERT MASTERDRIVES<br />
Gebersysteme<br />
■ Inkrementalgeber HTL (1024 S/R und 2048 S/R)<br />
Funktionsprinzip: Photoelektrische Abtastung<br />
DA65-5272<br />
Lichtquelle<br />
Ausgangssignale<br />
U A<br />
0<br />
U<br />
B<br />
0<br />
U<br />
0<br />
0<br />
Technische Daten<br />
Kondensor<br />
Siemens DA 65.3 · 2004<br />
Abtastplatte Teilscheibe Photoelemente<br />
Referenzmarke<br />
Signalperiode<br />
360° el.<br />
Messschritt<br />
Referenzimpuls<br />
Anschlussspannung: +10 ... 30 V<br />
Ausgangssignale: HTL<br />
Spur A, Spur B<br />
Nullimpuls und invertierte Signale<br />
Strichzahl: 1024 (optional: 2048)<br />
Genauigkeit: ± 1’<br />
Grenzfrequenz (–3 dB): 160 kHz<br />
Einsatz: Asynchron-Servomotoren<br />
1PH7, 1PL6, 1PH4<br />
max. mögliche Anschluss-Leitungslänge:<br />
– ohne Übertragung<br />
der invertierten Signale 150 m<br />
– mit Übertragung<br />
der invertierten Signale 300 m<br />
1) Bei Verwendung eines mehrpoligen Resolvers entspricht die<br />
Polzahl des Resolvers der Polzahl des Motors.<br />
DA65-5274c<br />
■ Resolver 2-polig/mehrpolig 1 )<br />
Funktionsprinzip: Induktive Abtastung,<br />
sin/cos-Auswertung für Rotorlage<br />
U<br />
Sinusspur<br />
Sinusabgriff<br />
Erregung: 2-10 kHz<br />
DA65-5270<br />
Ausgangssignale<br />
U Sinusspur<br />
U Cosinusspur<br />
DA65-5271<br />
Technische Daten<br />
Cosinusabgriff U Cosinusspur<br />
α=arctan U Sinusspur<br />
U Cosinusspur<br />
Drehtransformator<br />
Betriebsspannung/-frequenz +5 V/ 4 kHz<br />
Ausgangssignale 2 ): USinusspur = ü · UErregung · sin a<br />
UCosinusspur = ü · UErregung · cos a<br />
Übersetzungsverhältnis: ü = 0,5 ± 5 %<br />
Winkelfehlerbreite: < 5’ (mehrpolig)<br />
< 14’ (2-polig)<br />
< 20’ (2-polig in Achshöhe 28)<br />
Einsatz: Synchron-Servomotoren<br />
1FT6, 1FK7, 1FW3<br />
Asynchron-Servomotoren<br />
1PH7, 1PH4<br />
max. mögliche Anschluss- 150 m<br />
Leitungslänge:<br />
2) Ausgangssignale:<br />
– Resolver 2-polig:<br />
ein sin/cos-Signal pro Umdrehung<br />
– Resolver 4-polig:<br />
zwei sin/cos-Signale pro Umdrehung<br />
– Resolver 6-polig:<br />
drei sin/cos-Signale pro Umdrehung.<br />
t<br />
t