6 Anwendungsbeispiel: dünner Balken
6 Anwendungsbeispiel: dünner Balken
6 Anwendungsbeispiel: dünner Balken

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
6 <strong>Anwendungsbeispiel</strong>: <strong>dünner</strong> <strong>Balken</strong><br />
In diesem Kapitel fassen wir alle vorherigen Kapitel mit Hilfe eines physikalisch motivierten<br />
<strong>Anwendungsbeispiel</strong>s zusammen. Das Beispiel kann als typischer prototypischer Vertreter<br />
für zahlreiche Anwendungsfälle numerischer Verfahren angesehen werden. Grundsätzlich<br />
sind für den Numeriker dabei die folgenden Schritte durchzuführen, wobei der Schwerpunkt<br />
von Numerik 0 immer auf Diskretisierung und numerischer Lösung liegt.<br />
1. Problem/Aufgabenstellung: Biegung eines dünnen <strong>Balken</strong>s (z.B. Brücke oder<br />
Membran),<br />
2. Modellierung: Herleitung eines physikalischen Modells (Abschnitt 6.1),<br />
3. Diskretisierung (Abschnitt 6.2) mit Hilfe der Methoden aus Kapitel 3 (Interpolation,<br />
stückweise Interpolation, Differenzenverfahren zur Approximation von Ableitungen),<br />
4. Numerische Lösung (Abschnitt 6.3) des diskretisierten Problems. Bei linearen<br />
Problemen können sofort die Methoden aus Kapitel 4 genutzt werden. Bei nichtlinearen<br />
Problemen wird mittels eines Fixpunktverfahrens als Nullstellenaufgabe geschrieben<br />
(siehe Kapitel 5 bzw. 2) und hierin Lösung der linearen Gleichungen mit<br />
den Methoden aus Kapitel 4,<br />
5. Analyse der Ergebnisse mit Vergleich zu anderen Methoden für dasselbe Problem<br />
oder Abgleich mit Experimenten.<br />
y(x) = 0 y(x)<br />
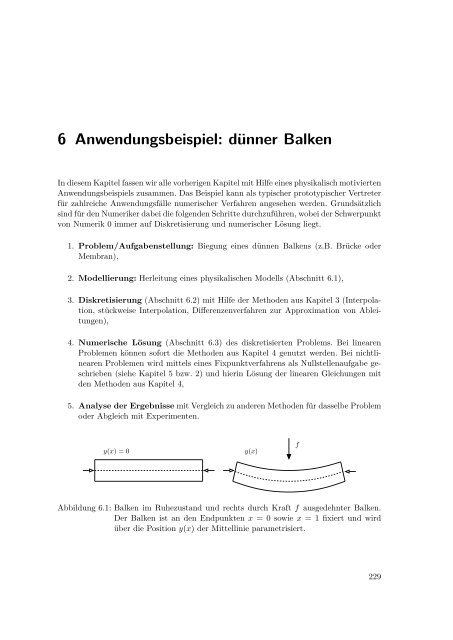
Abbildung 6.1: <strong>Balken</strong> im Ruhezustand und rechts durch Kraft f ausgedehnter <strong>Balken</strong>.<br />
Der <strong>Balken</strong> ist an den Endpunkten x = 0 sowie x = 1 fixiert und wird<br />
über die Position y(x) der Mittellinie parametrisiert.<br />
f<br />
229
6 <strong>Anwendungsbeispiel</strong>: <strong>dünner</strong> <strong>Balken</strong><br />
6.1 Modellierung eines elastischen <strong>Balken</strong>s<br />
In Abbildung 6.1 zeigen wir zunächst die Konfiguration. Ein <strong>Balken</strong> mit Länge L = 1 (im<br />
Ruhezustand) ist auf beiden Seiten eingespannt. Unter Einwirkung eines Biegemoments f<br />
wird der <strong>Balken</strong> ausgelenkt. Dabei bezeichnen wir mit y(x) die Deformation der Mittellinie<br />
in jedem Punkt x ∈ [0, 1] des undeformierten <strong>Balken</strong>s. Dabei gilt stets y(0) = y(1) = 0<br />
aufgrund der Einspannung. Die Biegung eines <strong>Balken</strong>s kann in jedem Punkt durch den<br />
Krümmungsradius ρ := ρ(x) gekennzeichnet werden. Der Krümmungsradius ist der Radius<br />
desjenigen Kreises, der in (x, y(x)) die Mittellinie des <strong>Balken</strong>s bei gleicher Krümmung<br />
berührt, siehe Abbildung 6.2.<br />
Die Krümmung erzeugt eine Dehnung ǫ := δe/e, welche die relative Längenänderung einer<br />
<strong>Balken</strong>linie angibt, die radial von der Mittellinie verschoben ist, siehe Abbildung 6.2 Mitte.<br />
Für eine Linie, die um y verschoben ist, gilt mit dem Strahlensatz:<br />
ρ + y<br />
ρ<br />
= e + δe<br />
e<br />
⇔ y<br />
ρ<br />
δe<br />
= . (6.1)<br />
e<br />
Das Hooke’sche Gesetz besagt, dass die Dehnung ǫ eines <strong>Balken</strong>s proportional zur Deformation<br />
y und der einwirkenden Kraft f ist:<br />
ǫ = µfy,<br />
wobei µ ∈ R ein Parameter ist, der die Materialeigenschaften des <strong>Balken</strong>s beschreibt (die<br />
Biegesteifigkeit). Aus dem Zusammenhang zwischen Dehnung und Krümmungsradius (6.1)<br />
folgt:<br />
µf = 1<br />
. (6.2)<br />
ρ<br />
Schließlich werden wir den Krümmungsradius ρ(x) lokal durch die Deformation y(x) ausdrücken.<br />
Siehe hierzu die rechte Skizze in Abbildung 6.2. Zunächst gilt aus geometrischen<br />
Überlegungen einerseits den Anstiegswinkel<br />
sowie für die Bogenlänge:<br />
δs = δα =<br />
<br />
δx 2 + δy 2 = δx<br />
tan(α) = δy<br />
δx ,<br />
<br />
1 + δy2 δα<br />
⇒<br />
δx2 δx =<br />
<br />
1 +<br />
2 δy<br />
.<br />
δx<br />
Wir betrachten alle Änderungen δx sowie δy und δα als infinitesimal. D.h., es gilt<br />
230<br />
δy<br />
δx<br />
= ∂<br />
∂x tan(α) = (1 + tan2 (α)) ∂α<br />
∂x<br />
= (1 + tan 2 (α)) δα<br />
<br />
δx<br />
<br />
2<br />
δy δα<br />
= 1 +<br />
δx δx<br />
δy2 ∂2<br />
=<br />
δx2 ∂2 ∂<br />
y(x) =<br />
x ∂x
ρ<br />
y<br />
y<br />
ρ<br />
e<br />
e<br />
e<br />
e + δe<br />
α + δα<br />
δy<br />
6.2 Diskretisierung<br />
ρ(x + δx)<br />
Abbildung 6.2: Links: Krümmungsradius ρ als Radius desjenigen Kreises mit der gleichen<br />
Krümmung. Mitte: Herleitung der Dehnung ǫ := δe/e als relative Längenänderung<br />
einer um radial verschobenen Linie. Rechts: Herleitung der<br />
Beziehung zwischen Deformation y(x) und Krümmungsradius ρ(x).<br />
Hiermit können wir δα/δx mit Hilfe der 2. Ableitung ersetzen und mit y ′ := ∂xy sowie<br />
mit y ′′ := ∂xxy gilt für die Krümmung<br />
∆α δα δα/δx<br />
κ := lim = =<br />
∆s→0 ∆s δs δs/δx =<br />
y ′′ (x)<br />
<br />
1 + y ′ (x) 2<br />
3 .<br />
und mit dem Zusammenhang zum Krümmungsradius κ := 1<br />
ρ und dem Materialgesetz 6.2<br />
erhalten wir die (nicht-lineare) Differentialgleichung für die Deformation eines die <strong>Balken</strong>s:<br />
y ′′ (x)<br />
(1 + y ′ (x) 2 ) 3<br />
2<br />
ds<br />
δx<br />
δα<br />
α<br />
ρ(x)<br />
= µf. (6.3)<br />
Für sehr kleine Auslenkungen (dann gilt y ′ (x) ≪ 1) erhalten wir hieraus die linearisierte<br />
Variante:<br />
y ′′ (x) = µf (6.4)<br />
die in vielen Büchern als Laplace-Gleichung (Modellgleichung) bekannt ist.<br />
6.2 Diskretisierung<br />
Wir suchen also eine Funktion y ∈ C 2 ([0, 1]), welche die Differentialgleichung (6.3) in jedem<br />
Punkt x ∈ [0, 1] erfüllt. Diese Differentialgleichung ist für gegebene Kraftverteilung f im<br />
Allgemeinen nicht analytisch lösbar und muss mit numerischen Verfahren approximiert<br />
231
6 <strong>Anwendungsbeispiel</strong>: <strong>dünner</strong> <strong>Balken</strong><br />
werden. Die Lösung y ∈ C 2 ([0, 1]) ist ein unendlich dimensionales Objekt und kann mit<br />
diskreten Methoden nie komplett beschrieben werden. Daher müssen wir in einem ersten<br />
Schritt das Problem diskretisieren, also in ein endlich dimensionales Problem überführen.<br />
Der übliche Zugang hierzu ist, die Funktion y ∈ C 2 ([0, 1]) durch eine Interpolierende yh(x)<br />
zu ersetzen. Hierzu zerlegen wir das Intervall I = [0, 1] zunächst in n + 1 diskrete Punkte<br />
0 = x0 < x1 < · · · < xn = 1, h = xi − xi−1 = 1<br />
n , xi = ih.<br />
Wir wählen die Zerlegung äquidistant, d.h., je zwei benachbarte Punkte haben den Abstand<br />
h. Zur Interpolation der Funktion y(x) in den Stützstellen yi := y(xi) wählen wir<br />
zwei verschiedene Zugänge aus Kapitel 3. Zunächst wählen wir die globale Lagrange-<br />
Interpolation:<br />
y n ∈ Pn(I) = span{1, x, . . . , x n }.<br />
Zu gegebenen Stützstellenpaaren (xi, y(xi)) ist diese Interpolation stets eindeutig bestimmt,<br />
siehe Satz 3.6. Wir wählen die Lagrange-Darstellung:<br />
y n n<br />
n x − xj<br />
(x) =<br />
. (6.5)<br />
i=0<br />
yiL (n)<br />
i (x), L (n)<br />
i (x) =<br />
xi − xj<br />
j=1,j=i<br />
Alternativ setzen wir yh (x) als stückweise lineare Interpolierende zusammen:<br />
y h <br />
x − xi x − xi−1<br />
(x) = yi−1 + yi. (6.6)<br />
[xi−1,xi] xi−1 − xi xi − xi−1<br />
Im Falle einer hinreichend regulären Lösung y(x) gelten bei exakter Interpolation (d.h.<br />
falls yi = y(xi) exakt bekannt sind) die Abschätzungen<br />
y n − y∞ ≤ y(n+1) ∞<br />
, y<br />
(n + 1)!<br />
h − y∞ ≤ h2<br />
2 y′′ ∞, (6.7)<br />
siehe Satz 3.4 sowie (3.6). Bei der ersten Abschätzung haben wir wegen |x − xj| ≤ 1 ganz<br />
grob abgeschätzt mit:<br />
n<br />
|x − xi| ≤ 1.<br />
i=0<br />
Diese Abschätzung ist sehr pessimistisch, da die meisten Faktoren |x − xj| ≪ 1 sehr viel<br />
kleiner als eins sind.<br />
Die Diskretisierung der Aufgabe besteht nun darin, die Klasse der möglichen Lösungen<br />
zu verringern. Anstelle eines y ∈ C 2 ([0, 1]) lassen wir nur noch Polynome gemäß (6.5)<br />
bzw. (6.6) zu. Das unendlich-dimensionale Problem wird durch ein endlich-dimensionales<br />
Problem ersetzt. Die beiden diskreten Funktionen haben jeweils n+1 Freiheiten, von denen<br />
die Randpunkte y0 = yn = 1 bereits bestimmt sind. Diese n + 1 Freiheitsgrade werden<br />
durch n + 1 Gleichungen in den Stützstellen beschrieben:<br />
y n (0) = 0,<br />
y n′′ (xi)<br />
(1 + y n′ (xi) 2 ) 3<br />
2<br />
= µf(xi), i = 1, . . . , n − 1, y n (1) = 0.<br />
Das Ergebnis ist ein nichtlineares Gleichungssystem mit n + 1 Gleichungen und den n + 1<br />
unbekannten Koeffizienten y0, . . . , yn.<br />
232
6.2.1 Diskretes Modell mit globaler Interpolation<br />
6.2 Diskretisierung<br />
Zum Aufstellen des diskreten Gleichungssystems müssen die Ableitungen von y n′ (x) und<br />
y n′′ (x) in den Gitterpunkten xi berechnet werden:<br />
y n′ n<br />
(xi) = yk ∂xL<br />
k=0<br />
(n)<br />
k (xi)<br />
<br />
=:a (1) , y<br />
(i,k,n)<br />
n′′ n<br />
(xi) = yk ∂xxL<br />
k=0<br />
(n)<br />
k (xi)<br />
<br />
=:a (2) .<br />
(i,k,n)<br />
Die Koeffizienten a (k) (i, k, n), also die k-te Ableitung der k-ten Lagrange-Basisfunktion<br />
im Punkt xi, müssen für jede Kombination von i, k und n berechnet werden. Für kleine<br />
Indizes kann diese Berechnung einfach analytisch geschehen. Für große Indizes muss diese<br />
Berechnung numerisch, z.B. mit der Newton’schen Darstellung aus Abschnitt 3.1.2 erfolgen.<br />
Diese Koeffizienten hängen nicht von der diskreten Funktion y n ab, sondern lediglich<br />
vom Ansatzgrad n und der Position der Stützstellen xi. Mit dieser Schreibweise gilt für<br />
das nichtlineare Gleichungssystem:<br />
y0 = 0,<br />
n<br />
a<br />
k=0<br />
(2) ⎛ <br />
n<br />
(i, k, n)yk − µf(xi) ⎝1 + a<br />
k=0<br />
(1) ⎞ 3<br />
2 2<br />
(i, k, n)yk ⎠ = 0, i = 1, . . . , n − 1,<br />
yn = 0.<br />
(6.8)<br />
Mit dem Koeffizientenvektor y ∈ R n+1 und entsprechender vektorwertiger Funktion F n :<br />
R n+1 → R n+1 schreiben wir kurz<br />
F n (y) = 0.<br />
6.2.2 Diskretes Modell mit stückweiser Interpolation<br />
Wir betrachten nun den stückweisen linearen Ansatz y h (x). Im Gegensatz zur globalen<br />
Interpolation y n (x) dürfen wir diese Ansatzfunktion nicht in die Differentialgleichung (6.3)<br />
einsetzen, da y h (x) in den Stützstellen gar nicht differenzierbar ist!<br />
Stattdessen werden wir zunächst die Ableitungen y ′ (x) und y ′′ (x) in den Stützstellen durch<br />
geeignete Differenzenquotienten approximieren. In Abschnitt 3.3 haben wir für die erste<br />
Ableitung zunächst die einseitigen Differenzenquotienten kennengelernt:<br />
y ′ (x) =<br />
y(x + h) − y(x)<br />
h<br />
+ h<br />
2 y′′ (ξ) + O(h 2 ).<br />
Dieser Differenzenquotient ist von erster Ordnung. D.h., bei Halbierung der Gitterweite<br />
ist eine Halbierung des Fehlers zu erwarten. Für den gewählten Diskretisierungsansatz<br />
mit stückweise linearen Funktionen ist diese erste Ordnung nicht optimal. Denn Abschätzung<br />
(6.7) besagt, dass sich der Interpolationsfehler zwischen y h und y quadratisch in h<br />
verhält. Zur besseren Balancierung wählen wir den zentralen Differenzenquotienten:<br />
y ′ (x) =<br />
y(x + h) − y(x − h)<br />
2h<br />
+ h2<br />
6 y′′′ (ξ) + O(h 4 ).<br />
233
6 <strong>Anwendungsbeispiel</strong>: <strong>dünner</strong> <strong>Balken</strong><br />
Zur Approximation der Ableitung in einem Punkt xi ersetzen wir die Funktionswerte y(x)<br />
durch die Koeffizienten der Lagrange-Darstellung:<br />
(y h ) ′ (xi) ≈ yi+1 − yi−1<br />
.<br />
2h<br />
Bei der zweiten Ableitung gehen wir entsprechend vor und approximieren mit dem zentralen<br />
Differenzenquotienten zweiter Ordnung:<br />
(y h ) ′′ (xi) ≈ −2yi + yi+1 + yi−1<br />
h2 .<br />
Wir setzen beide Approximationen in die Differentialgleichung (6.3) ein und erhalten das<br />
nichtlineare Gleichungssystem:<br />
−2yi + yi−1 + yi+1<br />
h 2<br />
− µf(xi)<br />
<br />
1 +<br />
yi+1 − yi−1<br />
2h<br />
2 3<br />
2<br />
y0 = 0,<br />
= 0, i = 1, . . . , n − 1,<br />
yn = 0.<br />
(6.9)<br />
Dieses Gleichungssystem können wir wieder kurz mit einer nichtlinearen Funktion F h :<br />
R n+1 → R n+1 schreiben.<br />
6.2.3 Vergleich und Diskussion der beiden Modelle<br />
Beide Diskretisierungsansätze führen jeweils auf ein nichtlineares Gleichungssystem mit<br />
n + 1 Unbekannten und n + 1 Gleichungen. Der Lösungsvektor y ∈ R n+1 steht jeweils für<br />
Approximationen an die Lösung in den Stützstellen yi ≈ y(xi). Das zweite Modell F h (·)<br />
ist von zweiter Ordnung in der Gitterweite h. Dabei geht die Ordnung gleich zweimal ein:<br />
zunächst kann eine stückweise lineare Funktion höchstens quadratisch in h → 0 gegen y(x)<br />
konvergieren. Auf der anderen Seite beruht die Diskretisierung auf Differenzenquotienten<br />
zweiter Ordnung in h. Das Modell F n ist zunächst eine Approximation von Grad n. Falls<br />
die Lösung y(x) hinreichend regulär ist, so ist durch (6.7) eine weit bessere, nämlich<br />
exponentielle Konvergenz in n zu erwarten.<br />
Das erste Modell hat jedoch zwei wesentliche Nachteile: die Koeffizienten des nichtlinearen<br />
Gleichungssystems (6.8) können nicht direkt angegeben werden, da die Faktoren<br />
a (k) (i, j, n) jeweils (numerisch) berechnet werden müssen. Zweitens kommen in jeder Gleichung<br />
sämtliche Koeffizienten y0, . . . , yn vor. D.h., das Gleichungssystem F n (y) = 0 ist<br />
global gekoppelt: jeder Koeffizient yi steht in direkter Kopplung mit jedem anderen Koeffizienten<br />
yj. Bei Modell F h (y) = 0 koppeln dagegen nur direkt benachbarte Koeffizienten.<br />
Wir kommen auf diesen wesentlichen Punkt bei der Diskussion der Lösungsverfahren zurück.<br />
234