Testbericht aus FMT - Modellbau Lindinger Onlineshop
Testbericht aus FMT - Modellbau Lindinger Onlineshop
Testbericht aus FMT - Modellbau Lindinger Onlineshop

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
48 JETS <strong>FMT</strong> 03 | 11<br />
Die Flächenbrücke muss gut eingeklebt<br />
und der Raum für den Servohebel noch etwas<br />
<strong>aus</strong>gearbeitet werden.<br />
Das Fahrwerk ist ein Einkreissystem, das bei<br />
Druckverlust mit Federspannung <strong>aus</strong>fährt. Das<br />
Steuerventil mit dem dazugehörenden Servo<br />
ist unter dem Cockpit platziert. Wenn das Ventil<br />
wie vorgesehen auf dem Sockel bleibt, ist<br />
ein Akkuwechsel nur möglich, solange kein<br />
Empfänger eingebaut ist. Ich habe das Ventil<br />
daher nach vorne verlegt.<br />
Die Fahrwerksmechaniken sind <strong>aus</strong> Aluminium<br />
gefertigt und machen einen präzisen<br />
Eindruck. Die Fahrwerksbeine bestehen<br />
<strong>aus</strong> 3-mm-Stahldraht mit angeschraubten<br />
und geklebten Federelementen und<br />
Radhaltern. Leider springen die Federn darin<br />
schon beim ersten Test auf dem Bautisch davon,<br />
weil sie nicht gesichert sind. Hier fehlen<br />
kleine Feder-Klemmscheiben zur Sicherung.<br />
Um es vorwegzunehmen, die Radhalter tragen<br />
die Maschine nicht. Daher habe ich einfache<br />
Drahtbeine mit einer Federwindung<br />
eingesetzt.<br />
Die Radschächte passen nicht so ganz zu<br />
den eingefahrenen Hauptfahrwerksbeinen.<br />
Hier muss etwas nachgeschliffen werden, was<br />
bei dem Werkstoff jedoch schnell erledigt ist.<br />
Die Befestigungsschrauben am Bugfahrwerk<br />
habe ich gekürzt und mit Sicherungslack wieder<br />
eingesetzt.<br />
Die Flügelabdeckung wird mit Stiften vorne am<br />
Rumpf gesichert, sonst fliegt sie weg.<br />
Der Schwenkflügel wird von einem Digitalservo<br />
bewegt. Der Mechanismus ist erstaunlich<br />
einfach und funktioniert tadellos.<br />
Die nächste Überraschung kam beim ersten<br />
Funktionstest: Das linke Fahrwerksbein<br />
bewegte sich nur unwillig, da es zu eng in<br />
seine Halterung gepresst war. Hier war ebenfalls<br />
Nacharbeit nötig. Also alles wieder <strong>aus</strong>bauen<br />
und nachfeilen. Das Befüllventil war<br />
ebenfalls undicht und so habe ich es durch<br />
eines von Robart ersetzt. Nun funktioniert<br />
auch das Fahrwerk.<br />
Die verwendeten Druckschläuche bestehen<br />
<strong>aus</strong> sehr hartem Material und sind nur wenig<br />
flexibel. Bei mir kam es nach einigen Berührungen<br />
zu Lecks an den Stecknippeln. Ich habe<br />
nach und nach alle Schläuche <strong>aus</strong>get<strong>aus</strong>cht.<br />
Programmierung und kosmetik<br />
Die Steuerung der Tomcat wird von den beiden<br />
Tailerons übernommen. Dazu muss ein Deltamischer<br />
programmiert werden. Die Angaben<br />
über die Ruder<strong>aus</strong>schläge in der Bauanleitung<br />
erwecken kein besonderes Vertrauen. Drei<br />
Fotos zeigen die Neutralstellung und die<br />
maximalen Ausschläge der Leitwerke. Mischungsverhältnisse<br />
müssen selbst ermittelt<br />
werden, das wird wieder spannend.<br />
Ich habe die Ausschläge zunächst zur Hälfte<br />
für Höhen- und Querruderfunktion aufgeteilt<br />
und mit Dual-Rate eine schaltbare Ausschlags-<br />
Antrieb und Servos sind in der Voll<strong>aus</strong>stattungsversion<br />
eingebaut. Der erneute Aufbau <strong>aus</strong> einem<br />
Teilesatz offenbart dann auch die Antriebe.<br />
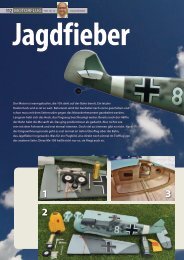
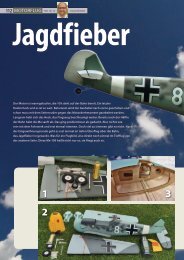
Der Drehbolzen wird mit einer M2-Schraube<br />
gesichert. Diese muss unbedingt mit<br />
Loctite oder Sekundenkleber verklebt werden.<br />
reduzierung vorgesehen. Der Schwenkflügel<br />
wird über einen Dreistufenschalter betätigt<br />
und mit einer Slow-Funktion auf drei Sekunden<br />
eingestellt. So kann ich erst einmal auf Mittelposition<br />
schwenken und die Flugeigenschaften<br />
beobachten, bevor eventuell alles zu spät<br />
ist. Später soll der Schwenkflügel mit einem<br />
Knüppeltaster betätigt werden.<br />
Die gesamte RC-Anlage wird über den mitgelieferten<br />
BEC-B<strong>aus</strong>tein mit Strom versorgt.<br />
Er ist bereits mit den Akkukabeln verlötet<br />
und muss nur in den Empfänger eingesteckt<br />
werden. Als Empfänger dient ein MZK-6-Kanal,<br />
der gut in den Bauraum unter dem Cockpit<br />
passt, nachdem ich den Kabelsalat mit etwas<br />
Spiralschlauch gebändigt habe.<br />
Die beiden Impeller werden über zwei<br />
Regler angesteuert, die empfängerseitig an<br />
einen Stecker zusammengefasst sind. Die<br />
Energie kommt <strong>aus</strong> einem 3S-LiPo-Akku mit<br />
3.300 mAh von Wellpower. Zum Glück passen<br />
meine vorhandenen 3.800er TopFuel-Akkus<br />
auch herein. Ein Styroporklotz hält den Akku<br />
in seiner Position hinter dem Cockpit. Der<br />
Gewichtsunterschied beträgt 60 g. Die ersten<br />
Testläufe in der Werkstatt zeigen gutes<br />
Beschleunigungsvermögen. So weit, so gut!<br />
Die hässlichen Kanäle auf der Unterseite<br />
von Flächen und Leitwerken stören den optischen<br />
Eindruck sehr. Ich habe wenigstens die<br />
Höhenleitwerke mit Moltofill-Leichtspachtel<br />
verspachtelt und verschliffen. Dieser Spachtel<br />
auf Wasserbasis lässt sich sehr leicht schleifen.<br />
Weiterhin habe ich die Fahrwerksbefestigungsbrettchen<br />
mit den beiliegenden Styroporteilen<br />
verkleidet. Das Loch unten im<br />
Rumpf, wo das Schwenkflügelservo montiert<br />
ist, wurde ebenfalls mit Depron verschlossen.<br />
Die Bewaffnung und die Zusatztanks klebte ich<br />
nach Fotos zusammen. Die schwarzen Streifen<br />
bei den mitgelieferten überzähligen Abziehbildern<br />
gehören auf die Maverick-Raketen.<br />
Die Spitzen der Sidewinder-Raketen wurden<br />
mit einem Edding eingefärbt. Die Zusatztanks<br />
sind mit Airbrushfarbe grau gespritzt.