- Seite 1 und 2: TNC 426 B TNC 430 NC-Software 280 4
- Seite 5: TNC-Typ, Software und Funktionen Di
- Seite 8 und 9: Inhalt 1 EINFÜHRUNG ..... 1 IV 1.1
- Seite 10 und 11: Inhalt VI 6.6 Bahnbewegungen - Frei
- Seite 12 und 13: Inhalt VIII KONTUR-ZUG (Zyklus 25)
- Seite 14 und 15: Inhalt 14 MOD-FUNKTIONEN ..... 295
- Seite 16 und 17: 1.1 Die TNC 426 B, die TNC 430 1.1
- Seite 18 und 19: 1.2 Bildschirm und Bedienfeld 4 Hau
- Seite 20 und 21: 1.3 Betriebsarten POSITIONIEREN MIT
- Seite 22 und 23: 1.4 Status-Anzeigen Informationen d
- Seite 24 und 25: 1.4 Status-Anzeigen 10 Informatione
- Seite 27 und 28: Handbetrieb und Einrichten2
- Seite 29 und 30: 2.2 Verfahren der Maschinenachsen D
- Seite 31 und 32: Schrittweises Positionieren Beim sc
- Seite 33 und 34: < HEIDENHAIN TNC 426 B, TNC 430 Bet
- Seite 35 und 36: Referenzpunkte-Anfahren bei geschwe
- Seite 37 und 38: 3 Positionieren mit Handeingabe
- Seite 39 und 40: Die Geraden-Funktion ist in „6.4
- Seite 41: Programmieren 4 Grundlagen, Datei-V
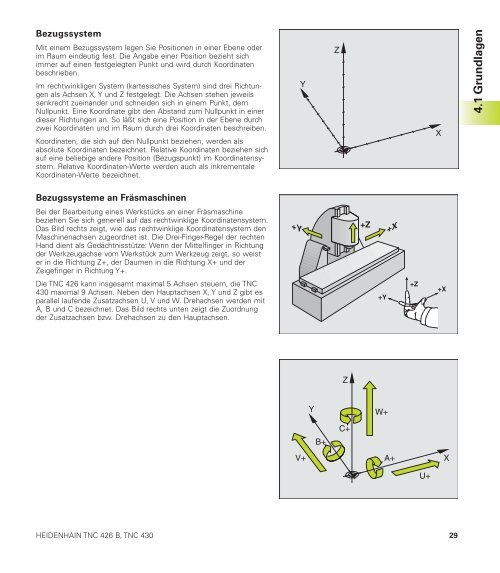
- Seite 45 und 46: Absolute und relative Werkstück-Po
- Seite 47 und 48: 4.2 Datei-Verwaltung Dateien und Da
- Seite 49 und 50: Im unteren Teil des schmalen Fenste
- Seite 51 und 52: Zum Kopieren von Verzeichnissen und
- Seite 53 und 54: Bestimmten Datei-Typ anzeigen Alle
- Seite 55 und 56: Dateien überschreiben Wenn Sie Dat
- Seite 57 und 58: 4.3 Programme eröffnen und eingebe
- Seite 59 und 60: Das Programm-Fenster zeigt die Defi
- Seite 61 und 62: 4.4 Programmier-Grafik Während Sie
- Seite 63 und 64: Gliederungs-Satz im Programm-Fenste
- Seite 65 und 66: Zeichen, Wörter und Zeilen lösche
- Seite 67 und 68: 4.8 Der Taschenrechner Die TNC verf
- Seite 69 und 70: Programmieren: Werkzeuge 5
- Seite 71 und 72: 5.2 Werkzeug-Daten Üblicherweise p
- Seite 73 und 74: Werkzeug-Daten in die Tabelle einge
- Seite 75 und 76: Werkzeug-Tabellen editieren Die fü
- Seite 77 und 78: Werkzeug-Daten aufrufen Einen Werkz
- Seite 79 und 80: Werkzeug-Radiuskorrektur Der Progra
- Seite 81 und 82: Radiuskorrektur: Ecken bearbeiten A
- Seite 83 und 84: Die Koordinaten für die Position X
- Seite 85 und 86: Die Spindeldrehzahl berechnet sich
- Seite 87 und 88: Werkzeug-Länge vermessen Bevor Sie
- Seite 89 und 90: Werkzeug-Radius vermessen Bevor Sie
- Seite 91: ú Meßzyklus programmieren: In der
- Seite 94 und 95:
6.1 Übersicht: Werkzeug-Bewegungen
- Seite 96 und 97:
6.2 Grundlagen zu den Bahnfunktione
- Seite 98 und 99:
6.3 Kontur anfahren und verlassen 6
- Seite 100 und 101:
6.3 Kontur anfahren und verlassen A
- Seite 102 und 103:
6.3 Kontur anfahren und verlassen W
- Seite 104 und 105:
6.4 Bahnbewegungen - rechtwinklige
- Seite 106 und 107:
6.4 Bahnbewegungen - rechtwinklige
- Seite 108 und 109:
6.4 Bahnbewegungen - rechtwinklige
- Seite 110 und 111:
6.4 Bahnbewegungen - rechtwinklige
- Seite 112 und 113:
6.4 Bahnbewegungen - rechtwinklige
- Seite 114 und 115:
6.5 Bahnbewegungen - Polarkoordinat
- Seite 116 und 117:
6.5 Bahnbewegungen - Polarkoordinat
- Seite 118 und 119:
6.5 Bahnbewegungen - Polarkoordinat
- Seite 120 und 121:
6.6 Bahnbewegungen - Freie Kontur-P
- Seite 122 und 123:
6.6 Bahnbewegungen - Freie Kontur-P
- Seite 124 und 125:
6.6 Bahnbewegungen - Freie Kontur-P
- Seite 126 und 127:
6.6 Bahnbewegungen - Freie Kontur-P
- Seite 128 und 129:
6.7 Programmier-Beispiele Beispiel:
- Seite 130 und 131:
6.7 Programmier-Beispiele Beispiel:
- Seite 132 und 133:
Programmieren: Zusatz-Funktionen 7
- Seite 134 und 135:
7.2 Zusatz-Funktionen für Programm
- Seite 136 und 137:
Positionen im ungeschwenkten Koordi
- Seite 138 und 139:
Definierten Rundungskreis zwischen
- Seite 140 und 141:
Ruckverminderung beim Ändern der V
- Seite 142 und 143:
Wirkung M103 wird wirksam am Satz-A
- Seite 144 und 145:
Die TNC interpretiert den programmi
- Seite 146:
Wirkung M114 wird wirksam am Satz-A
- Seite 149 und 150:
8.1 Allgemeines zu den Zyklen 8.1 A
- Seite 151 und 152:
8.2 Bohrzyklen 8.2 Bohrzyklen Die T
- Seite 153 und 154:
8.2 Bohrzyklen BOHREN (Zyklus 200)
- Seite 155 und 156:
8.2 Bohrzyklen AUSDREHEN (Zyklus 20
- Seite 157 und 158:
8.2 Bohrzyklen 144 Beachten Sie vor
- Seite 159 und 160:
8.2 Bohrzyklen GEWINDEBOHREN ohne A
- Seite 161 und 162:
8.2 Bohrzyklen Beispiel: Bohrzyklen
- Seite 163 und 164:
8.3 Zyklen zum Fräsen von Taschen,
- Seite 165 und 166:
8.3 Zyklen zum Fräsen von Taschen,
- Seite 167 und 168:
8.3 Zyklen zum Fräsen von Taschen,
- Seite 169 und 170:
8.3 Zyklen zum Fräsen von Taschen,
- Seite 171 und 172:
8.3 Zyklen zum Fräsen von Taschen,
- Seite 173 und 174:
8.3 Zyklen zum Fräsen von Taschen,
- Seite 175 und 176:
8.3 Zyklen zum Fräsen von Taschen,
- Seite 177 und 178:
8.3 Zyklen zum Fräsen von Taschen,
- Seite 179 und 180:
8.3 Zyklen zum Fräsen von Taschen,
- Seite 181 und 182:
8.4 Zyklen zum Herstellen von Punkt
- Seite 183 und 184:
8.4 Zyklen zum Herstellen von Punkt
- Seite 185 und 186:
8.4 Zyklen zum Herstellen von Punkt
- Seite 187 und 188:
8.5 SL-Zyklen Die Maßangaben für
- Seite 189 und 190:
8.5 SL-Zyklen „Summen“ -Fläche
- Seite 191 und 192:
8.5 SL-Zyklen 178 ú SICHERHEITS-AB
- Seite 193 und 194:
8.5 SL-Zyklen SCHLICHTEN SEITE (Zyk
- Seite 195 und 196:
8.5 SL-Zyklen Das Unterprogramm ent
- Seite 197 und 198:
8.5 SL-Zyklen
- Seite 199 und 200:
8.5 SL-Zyklen
- Seite 201 und 202:
8.5 SL-Zyklen 188 Kontur
- Seite 203 und 204:
8.5 SL-Zyklen 190 Kont
- Seite 205 und 206:
8.6 Zyklen zum Abzeilen 192 Beachte
- Seite 207 und 208:
8.6 Zyklen zum Abzeilen 194 Beachte
- Seite 209 und 210:
8.6 Zyklen zum Abzeilen 196 Beachte
- Seite 211 und 212:
8.7 Zyklen zur Koordinaten-Umrechnu
- Seite 213 und 214:
8.7 Zyklen zur Koordinaten-Umrechnu
- Seite 215 und 216:
8.7 Zyklen zur Koordinaten-Umrechnu
- Seite 217 und 218:
8.7 Zyklen zur Koordinaten-Umrechnu
- Seite 219 und 220:
8.7 Zyklen zur Koordinaten-Umrechnu
- Seite 221 und 222:
8.7 Zyklen zur Koordinaten-Umrechnu
- Seite 223 und 224:
8.7 Zyklen zur Koordinaten-Umrechnu
- Seite 225 und 226:
8.8 Sonder-Zyklen SPINDEL-ORIENTIER
- Seite 227 und 228:
9.1 Unterprogramme und Programmteil
- Seite 229 und 230:
9.4 Beliebiges Programm als Unterpr
- Seite 231 und 232:
9.5 Verschachtelungen Programm-Ausf
- Seite 233 und 234:
9.6 Programmier-Beispiele Beispiel:
- Seite 235 und 236:
9.6 Programmier-Beispiele Be
- Seite 238 und 239:
Programmieren: Q-Parameter 10
- Seite 240 und 241:
Dann zeigt die TNC folgende Softkey
- Seite 242 und 243:
Beispiel: Grundrechenarten programm
- Seite 244 und 245:
10.5 Wenn/dann-Entscheidungen mit Q
- Seite 246 und 247:
10.7 Zusätzliche Funktionen Die zu
- Seite 248 und 249:
Beispiel für eine Text-Datei, die
- Seite 250 und 251:
Gruppen-Name, ID-Nr. Nummer Index S
- Seite 252 und 253:
FN19: PLC Werte an PLC übergeben M
- Seite 254 und 255:
Verknüpfungs-Funktion Softkey\b Ar
- Seite 256 und 257:
10.9 Vorbelegte Q-Parameter Die Q-P
- Seite 258 und 259:
Beispiel: Ellipse Programm-Ablauf
- Seite 260 und 261:
Beispiel: Zylinder konkav mit Radiu
- Seite 262 und 263:
Beispiel: Kugel konvex mit Schaftfr
- Seite 264 und 265:
Programm-Test und Programmlauf 11
- Seite 266 und 267:
Einschränkung während des Program
- Seite 268 und 269:
Softkey-Leiste in der Betriebsart P
- Seite 270 und 271:
11.2 Funktionen zur Programmanzeige
- Seite 272 und 273:
11.4 Programmlauf In der Betriebsar
- Seite 274 und 275:
Maschinenachsen während einer Unte
- Seite 276 und 277:
Der Satzvorlauf darf nicht in einem
- Seite 278 und 279:
3D-Tastsysteme12
- Seite 280 und 281:
Meßwerte aus den Antastzyklen prot
- Seite 282 und 283:
Kalibrierwerte anzeigen Die TNC spe
- Seite 284 und 285:
Grunddrehung aufheben ú Antastfunk
- Seite 286 und 287:
Bezugspunkte über Bohrungen setzen
- Seite 288 und 289:
ú Tastsystem in die Nähe des zwei
- Seite 290 und 291:
ú In der Betriebsart PROGRAMM EINS
- Seite 292 und 293:
Digitalisieren13
- Seite 294 und 295:
Die Digitalisier-Zyklen sind für d
- Seite 296 und 297:
Punkte-Tabellen Wenn Sie mit einem
- Seite 298 und 299:
13.3 Mäanderförmig Digitalisieren
- Seite 300 und 301:
13.4 Höhenlinien digitalisieren
- Seite 302 und 303:
13.5 Zeilenweise digitalisieren ■
- Seite 304 und 305:
13.6 Digitalisieren mit Drehachsen
- Seite 306:
13.7 Digitalisierdaten in einem Bea
- Seite 309 und 310:
14.1 MOD-Funktionen wählen, änder
- Seite 311 und 312:
14.4 Datenschnittstellen einrichten
- Seite 313 und 314:
14.5 Maschinenspezifische Anwender-
- Seite 315 und 316:
14.7 Positions-Anzeige wählen, 14.
- Seite 317 und 318:
14.12 HELP-Dateien anzeigen Maximal
- Seite 320 und 321:
15 Tabellen und Übersichten
- Seite 322 und 323:
Externe Datenübertragung TNC-Schni
- Seite 324 und 325:
Zuordnung Tastsystemachse zur Masch
- Seite 326 und 327:
Messung mit rotierendem Werkzeug: Z
- Seite 328 und 329:
Werkzeug-Tabelle konfigurieren (Nic
- Seite 330 und 331:
Anzeigeschritt für die 6. Achse An
- Seite 332 und 333:
SL-Zyklen Zyklus 4 TASCHENFRAESEN u
- Seite 334 und 335:
15.2 Steckerbelegung und Anschlußk
- Seite 336 und 337:
Schnittstelle V.11/RS-422 An der V.
- Seite 338 und 339:
15.3 Technische Information Die TNC
- Seite 340 und 341:
TNC-Daten Satz-Verarbeitungszeit 4
- Seite 342 und 343:
FALSCHE ACHSE PROGRAMMIERT ■ Gesp
- Seite 344:
SPIEGELUNG NICHT ERLAUBT Koordinate
- Seite 347 und 348:
Index II D Digitalisieren Bereich f
- Seite 349 und 350:
Index S Spindeldrehzahl ändern ...
- Seite 351:
DR. JOHANNES HEIDENHAIN GmbH Dr.-Jo