

3 Nm Industrie-Stellantrieb - Dr. Fritz Faulhaber GmbH & Co. KG
3 Nm Industrie-Stellantrieb - Dr. Fritz Faulhaber GmbH & Co. KG
3 Nm Industrie-Stellantrieb - Dr. Fritz Faulhaber GmbH & Co. KG

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
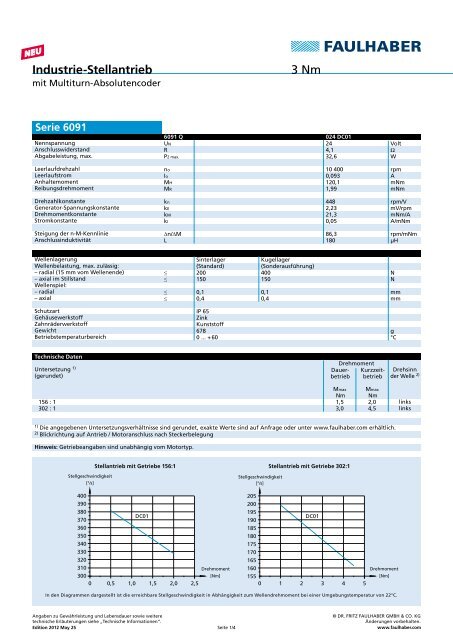
<strong>Industrie</strong>-<strong>Stellantrieb</strong><br />
mit Multiturn-Absolutencoder<br />
3 <strong>Nm</strong><br />
Serie 6091<br />
Nennspannung<br />
Anschlusswiderstand<br />
Abgabeleistung, max.<br />
6091 Q 024 DC01<br />
24<br />
4,1<br />
32,6<br />
UN<br />
R<br />
P2 max.<br />
Volt<br />
Ω<br />
W<br />
Leerlaufdrehzahl<br />
Leerlaufstrom<br />
Anhaltemoment<br />
Reibungsdrehmoment<br />
no<br />
Io<br />
MH<br />
MR<br />
10 400<br />
0,093<br />
120,1<br />
1,99<br />
rpm<br />
A<br />
m<strong>Nm</strong><br />
m<strong>Nm</strong><br />
<strong>Dr</strong>ehzahlkonstante<br />
Generator-Spannungskonstante<br />
<strong>Dr</strong>ehmomentkonstante<br />
Stromkonstante<br />
kn<br />
kE<br />
kM<br />
kI<br />
448<br />
2,23<br />
21,3<br />
0,05<br />
rpm/V<br />
mV/rpm<br />
m<strong>Nm</strong>/A<br />
A/m<strong>Nm</strong><br />
Steigung der n-M-Kennlinie<br />
Anschlussinduktivität<br />
∆n/∆M<br />
L<br />
86,3<br />
180<br />
rpm/m<strong>Nm</strong><br />
µH<br />
Wellenlagerung<br />
Wellenbelastung, max. zulässig:<br />
– radial (15 mm vom Wellenende)<br />
– axial im Stillstand<br />
Wellenspiel:<br />
– radial<br />
– axial<br />
≤<br />
≤<br />
≤<br />
≤<br />
Sinterlager<br />
Kugellager<br />
(Standard)<br />
(Sonderausführung)<br />
200 400<br />
150 150<br />
0,1 0,1<br />
0,4 0,4<br />
N<br />
N<br />
mm<br />
mm<br />
Schutzart<br />
Gehäusewerkstoff<br />
Zahnräderwerkstoff<br />
Gewicht<br />
Betriebstemperaturbereich<br />
IP 65<br />
Zink<br />
Kunststoff<br />
678<br />
0 ... + 60<br />
g<br />
°C<br />
Technische Daten<br />
Untersetzung 1)<br />
(gerundet)<br />
<strong>Dr</strong>ehmoment<br />
Dauerbetrieb<br />
Kurzzeitbetrieb<br />
<strong>Dr</strong>ehsinn<br />
der Welle 2)<br />
<strong>Nm</strong> <strong>Nm</strong><br />
156 : 1 1,5 2,0<br />
302 : 1 3,0 4,5<br />
Mmax<br />
Mmax<br />
links<br />
links<br />
1)<br />
Die angegebenen Untersetzungsverhältnisse sind gerundet, exakte Werte sind auf Anfrage oder unter www.faulhaber.com erhältlich.<br />
2)<br />
Blickrichtung auf Antrieb / Motoranschluss nach Steckerbelegung<br />
Hinweis: Getriebeangaben sind unabhängig vom Motortyp.<br />
<strong>Stellantrieb</strong> mit Getriebe 156:1 <strong>Stellantrieb</strong> mit Getriebe 302:1<br />
Stellgeschwindigkeit<br />
[°/s]<br />
400<br />
390<br />
380<br />
370<br />
DC01<br />
360<br />
350<br />
340<br />
330<br />
320<br />
310<br />
<strong>Dr</strong>ehmoment<br />
300<br />
[<strong>Nm</strong>]<br />
0 0,5 1,0 1,5 2,0 2,5<br />
Stellgeschwindigkeit<br />
[°/s]<br />
205<br />
200<br />
195<br />
DC01<br />
190<br />
185<br />
180<br />
175<br />
170<br />
165<br />
160<br />
155<br />
0 1 2 3 4 5<br />
<strong>Dr</strong>ehmoment<br />
[<strong>Nm</strong>]<br />
In den Diagrammen dargestellt ist die erreichbare Stellgeschwindigkeit in Abhängigkeit zum Wellendrehmoment bei einer Umgebungstemperatur von 22°C.<br />
Angaben zu Gewährleistung und Lebensdauer sowie weitere<br />
technische Erläuterungen siehe „Technische Informationen”.<br />
Edition 2012 May 25<br />
Seite 1/4<br />
© DR. FRITZ FAULHABER GMBH & CO. <strong>KG</strong><br />
Änderungen vorbehalten.<br />
www.faulhaber.com
Besonderheiten<br />
Der Encoder basiert auf einem magnetischen Hallsensorprinzip und<br />
ist wartungsfrei.<br />
Nach einem Spannungsabfall oder einem Verdrehen der Abtriebswelle<br />
im ausgeschalteten Zustand erkennt der Encoder die aktuelle<br />
Position.<br />
Variante MA (Multiturn Analog): Über mehrere Umdrehungen wird,<br />
abhängig von der Position der Abtriebswelle, ein analoges, ratiometrisches<br />
Ausgangssignal ausgegeben.<br />
Variante MD (Multiturn Digital): Über die Schnittstelle RS485<br />
kann die Position der Abtriebswelle über mehrere Umdrehungen<br />
abgefragt werden. Hierbei ist nur eine Punkt zu Punkt Verbindung<br />
möglich, kein Netzwerkbetrieb.<br />
Der Anschluß des <strong>Stellantrieb</strong>s erfolgt über einen Rundsteckverbinder.<br />
Weitere, vom Standard abweichende Varianten, sind auf Anfrage<br />
verfügbar. Bitte kontaktieren Sie hierzu Ihren Verkaufsberater.<br />
Maßzeichnung<br />
Abbildungen verkleinert<br />
ø72 4x ø4,5 ±0,1 ø25 -0,15<br />
0<br />
ø8<br />
-0,008<br />
-0,015<br />
60<br />
max.<br />
ø60,6<br />
20<br />
7<br />
max. 61,6<br />
28 5 8<br />
91,3 32,2<br />
6091Q024DC01 ...<br />
Rundsteckverbinder<br />
M12x1 DIN EN 61076-2-101<br />
Angaben zu Gewährleistung und Lebensdauer sowie weitere<br />
technische Erläuterungen siehe „Technische Informationen”.<br />
Edition 2012 May 25<br />
Seite 2/4<br />
© DR. FRITZ FAULHABER GMBH & CO. <strong>KG</strong><br />
Änderungen vorbehalten.<br />
www.faulhaber.com
Integrierter Absolutencoder analog<br />
Umdrehungsanzahl<br />
Ausgangssignal<br />
Betriebsspannung<br />
Nennstromaufnahme<br />
Ausgangswiderstand<br />
N<br />
VCC<br />
ICC<br />
ROUT<br />
MA-47/75<br />
MA-40/75<br />
46,8 39,6<br />
analog, ratiometrisch<br />
4,5 ... 5,5<br />
typ. 14, max. 17,5<br />
100<br />
V DC<br />
mA<br />
Ω<br />
Elektrischer <strong>Dr</strong>ehwinkel<br />
Gesamtanzahl Inkremente<br />
Winkelauflösung, gerundet<br />
Linearitätsabweichung, max.<br />
Untergrenze des linearen Bereichs<br />
Obergrenze des linearen Bereichs<br />
Φel<br />
Ninc<br />
Φres<br />
Vlin, min<br />
Vlin, max<br />
16 848 14 256<br />
3 523 2 981<br />
4,8<br />
± 0,25<br />
0,05 · VCC<br />
0,95 · VCC<br />
°<br />
Inc.<br />
°<br />
%<br />
V DC<br />
V DC<br />
Besonderheiten / Anschlussinformation<br />
Optionen<br />
Weitere, vom Standard abweichende Varianten, sind auf<br />
Anfrage verfügbar. Bitte kontaktieren Sie hierzu Ihren<br />
Verkaufsberater.<br />
Produktkennzeichnung<br />
Beispiele:<br />
6091Q024DC01 MA47/75 K302:1<br />
6091Q024DC01 MA40/75 S156:1<br />
3<br />
4<br />
2<br />
8<br />
1<br />
6<br />
7<br />
Steckerbelegung<br />
2<br />
1<br />
5<br />
3<br />
4<br />
Anschlüsse<br />
Nr. Funktion<br />
1 Motor +<br />
2 Motor –<br />
3 Encoder VCC 5V<br />
4 Encoder VOUT<br />
5 Encoder GND<br />
5<br />
Achtung:<br />
Falsche Polung führt<br />
zur Zerstörung der<br />
Elektronik!<br />
Schaltdiagramm / Ausgangssignale<br />
Schaltdiagramm<br />
der Ausgangsstufe<br />
Ausgangssignale<br />
VOUT<br />
3<br />
VCC<br />
Φres<br />
ROUT<br />
4<br />
Vlin, max<br />
0,9·VCC /NINC<br />
5 Z<br />
Z<br />
Vlin, min<br />
0<br />
Φel<br />
Φ<br />
Angaben zu Gewährleistung und Lebensdauer sowie weitere<br />
technische Erläuterungen siehe „Technische Informationen”.<br />
Edition 2012 May 25<br />
Seite 3/4<br />
© DR. FRITZ FAULHABER GMBH & CO. <strong>KG</strong><br />
Änderungen vorbehalten.<br />
www.faulhaber.com
Integrierter Absolutencoder digital<br />
Umdrehungsanzahl<br />
Betriebsspannung (±10%)<br />
Nennstromaufnahme bei 24V, max.<br />
N<br />
VCC<br />
ICC<br />
MD-81/1053<br />
81<br />
24<br />
80<br />
V DC<br />
mA<br />
Elektrischer <strong>Dr</strong>ehwinkel<br />
Gesamtanzahl Inkremente<br />
Winkelauflösung, gerundet<br />
Linearitätsabweichung, max.<br />
Φel<br />
Ninc<br />
Φres<br />
29 160<br />
85 313<br />
0,35<br />
± 0,25<br />
°<br />
Inc.<br />
°<br />
%<br />
Beschreibung Schnittstelle<br />
Physikalische Schnittstelle<br />
Topologie<br />
Abschlusswiderstand, integriert<br />
Übertragungsgeschwindigkeit<br />
Abfragerate, max.<br />
RS485, halb-duplex<br />
Punkt zu Punkt Verbindung<br />
120<br />
115 200<br />
2<br />
Ω<br />
baud<br />
ms<br />
Besonderheiten / Anschlussinformation<br />
Optionen<br />
Weitere, vom Standard abweichende Varianten, sind auf<br />
Anfrage verfügbar. Bitte kontaktieren Sie hierzu Ihren<br />
Verkaufsberater.<br />
Produktkennzeichnung<br />
Beispiel:<br />
6091Q024DC01 MD81/1053 K302:1<br />
Steckerbelegung<br />
8<br />
2<br />
1<br />
3<br />
7<br />
4<br />
6<br />
5<br />
Anschlüsse<br />
Nr. Funktion<br />
21 Motor + 1<br />
2 Motor –<br />
3 Encoder VCC 24V<br />
4 Encoder GND<br />
5<br />
5 RS485 A<br />
6 RS485 B<br />
37 n.c..<br />
4<br />
8 n.c.<br />
Achtung:<br />
Falsche Polung führt<br />
zur Zerstörung der<br />
Elektronik!<br />
Schaltdiagramm / Ausgangssignale<br />
Ausgangssignale<br />
Inkremente<br />
85 313<br />
Φres<br />
1 Inc<br />
Z<br />
Z<br />
0<br />
Φel<br />
Φ<br />
Angaben zu Gewährleistung und Lebensdauer sowie weitere<br />
technische Erläuterungen siehe „Technische Informationen”.<br />
Edition 2012 May 25<br />
Seite 4/4<br />
© DR. FRITZ FAULHABER GMBH & CO. <strong>KG</strong><br />
Änderungen vorbehalten.<br />
www.faulhaber.com











