4. Cartesische Geometrie II: Kreise und Sphären Eine Gerade kann ...
4. Cartesische Geometrie II: Kreise und Sphären Eine Gerade kann ...
4. Cartesische Geometrie II: Kreise und Sphären Eine Gerade kann ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>4.</strong> <strong>Cartesische</strong> <strong>Geometrie</strong> <strong>II</strong>: <strong>Kreise</strong> <strong>und</strong> <strong>Sphären</strong><br />
<strong>Eine</strong> <strong>Gerade</strong> <strong>kann</strong> man sich nur denken, man <strong>kann</strong> sie nicht durch Bewegung erzeugen<br />
(dafür lebt man nicht lange genug). Dies ist anders bei <strong>Kreise</strong>n. <strong>Kreise</strong> <strong>und</strong> Ellipsen<br />
<strong>kann</strong> man statisch definieren (als Ort aller Punkte, die von einem gegeben Punkt denselben<br />
Abstand haben) oder dynamisch definieren (als Spur einer kreiförmigen Bahn - etwa<br />
einer Planetenbahn). In diesem Abschnitt betrachten wir <strong>Kreise</strong>, Streckungen <strong>und</strong> alle<br />
Bewegungen (die den Nullpunkt festlassen).<br />
Streckungen.<br />
Manche geometrische Probleme erscheinen nur schwierig, weil man sie falsch ansieht. Sie<br />
werden oft ganz einfach, wenn man seinen Blickwinkel ändert. Wir wollen uns dies an<br />
einem illustrativen Bespiel sehen, nämlich der Existenz des sog. Feuerbach <strong>Kreise</strong>s,<br />
Definition. <strong>Eine</strong> Streckung ist eine lineare Abbildung L : R n → R n<br />
definiert durch<br />
L(v) = λ · v. λ ≠ 0.<br />
Bemerkung. Streckungen werden durch Diagonalmatrizen beschrieben, deren Eingänge<br />
in der Hauptdiagonale alle λ sind.<br />
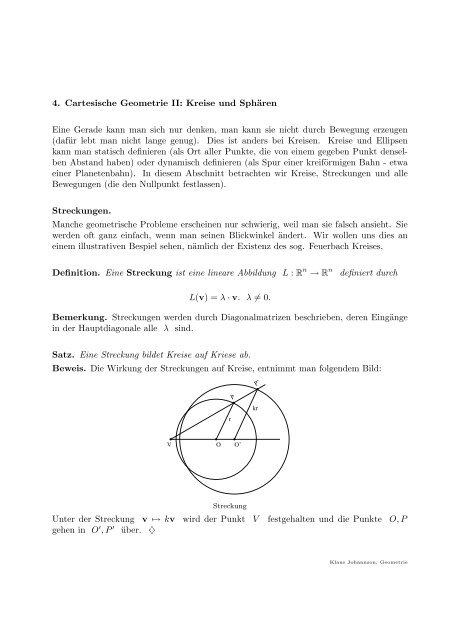
Satz. <strong>Eine</strong> Streckung bildet <strong>Kreise</strong> auf Kriese ab.<br />
Beweis. Die Wirkung der Streckungen auf <strong>Kreise</strong>, entnimmt man folgendem Bild:<br />
r<br />
P P’<br />
kr<br />
V O O’<br />
Streckung<br />
Unter der Streckung v ↦→ kv wird der Punkt V<br />
gehen in O ′ ,P ′ über. ♦<br />
festgehalten <strong>und</strong> die Punkte O,P<br />
Klaus Johannson, <strong>Geometrie</strong>
§5 <strong>Cartesische</strong> <strong>Geometrie</strong> <strong>II</strong> 31<br />
Satz. (9. Punkte-Satz) Sei ∆ABC eine Dreieck. Seien A ′ ,B ′ ,C ′ die Fußpunkte<br />
der Lote von den Punkten A,B,C auf die gegenüberliegenden Seiten des Dreiecks. Seien<br />
A ′′ ,B ′′ ,C ′′ die Mittelpunkte der Seiten CB,AC,AB des Dreiecks. Seien X,Y,Z die<br />
Mittelpunkte der Strecken AP,BP,CP, wobei P der Schnitt der drei Lote ist.<br />
Dann gibt es einen Kreis (den sog. Feuerbach Kreis) der die 9 Punkte:<br />
enthält.<br />
X,Y,Z, A ′ ,B ′ ,C ′ ,A ′′ ,B ′′ ,C ′′<br />
Beweis (durch Abbildungsgeometrie). Wir betrachten nun den 9-Punkte-Satz vom<br />
Standpunkt der Abbildungsgeometrie. Betrachte das folgende Bild zum 9-Punkte Kreis:<br />
F’<br />
C<br />
F<br />
P<br />
E<br />
E’<br />
D<br />
A<br />
B<br />
D’<br />
die 9-Punkte des 9-Punkte Satzes<br />
Wir wissen, dass sich alle drei Höhen (Lote) des Dreiecks ∆ABC in einem Punkt, etwa<br />
P, schneiden. Man nennt diesen Punkt das Orthozentrum des Dreiecks ∆ABC. Wir<br />
verlängern die Strecke CP bis zum Schnittpunkt D ′ mit dem äusseren Kreis.<br />
Behauptung. PD ≡ DD ′ (<strong>und</strong> ebenso PE ≡ EE ′ ,PF ≡ PF ′ .<br />
Um dies zu sehen, genügt es zu zeigen, dass ∆APD ≡ ∆ADD ′ . Da diese beiden Dreiecke<br />
die Seite AD gemeinsam haben <strong>und</strong> weiter beide einen rechten Winkel haben, muss man,<br />
nach den Kongruenzsätzen, nur noch zeigen, dass ̸ DAD ′ ≡ ̸ PAD. Aber ̸ BAD ′ ≡<br />
̸ BCD <strong>und</strong> ̸ BCD ≡ ̸ PAD (betrachte Winkelsumme in den beiden Dreiecken ∆BAE<br />
<strong>und</strong> ∆BCD). Dies beweist die Behauptung.<br />
Nun betrachte die Streckung vom Punkt P mit Streckungsfaktor 1/2. Dann bildet diese<br />
Streckung den gr¨ßeren Kreis <strong>und</strong> somit insbesondere die Punkte A,D ′ ,BE ′ ,C,F ′ auf<br />
den kleineren Kreis ab. Es folgt damit, dass 6 der 9 Punkte auf einem Kreis liegen müssen.<br />
Klaus Johannson, <strong>Geometrie</strong>
32 . <strong>Geometrie</strong><br />
Um zu zeigen, dass die restlichen Punkte auf demselben Kreis liegen müssen, betrachte<br />
zunächst das Dreieck<br />
∆ABP<br />
Sein Orthozentrum ist der Punkt C. Betrachte die Streckung von diesem Punkt mit<br />
Streckungsfaktor 1/2. Dann bildet auch diese Streckung den großen Kreis auf den kleinen<br />
Kreis ab. Da A,B,C auf dem großen Kreis liegen, müssen die Mittelpunkte von AC<br />
<strong>und</strong> BC auf dem kleinen Kreis liegen (<strong>und</strong> ebenso der von AB). ♦<br />
Komplexe Zahlen.<br />
Als nächstes studieren wir die niedrig-dimensionalen Rotationsgruppen SO 2 R <strong>und</strong> SO 3 R.<br />
Dazu brauchen wir aber etwas zusätzliches algebraisches Rüstzeug. Wir beginnen mit den<br />
komplexen Zahlen.<br />
Der 2-dimensionale Vektorraum R 2 hat neben der Addition noch eine Multiplikation mit<br />
besonders schönen Eigenschaften, dies ist die ”komplexe Multiplikation”. Die komplexe<br />
Multiplikation ist gegeben durch<br />
[ ] [ ]<br />
a c<br />
×<br />
b C :=<br />
d<br />
[ ]<br />
ac − bd<br />
.<br />
ad + bc<br />
Es gibt mindestens zwei Wege sich dieses eigenartige Definition zu erklären - je nachdem<br />
wie man die Elemente von C schreibt.<br />
1. Erklärung für die komplexe Multiplikation. Zum einen <strong>kann</strong> man die Elemente<br />
von C schreiben als<br />
a + bi, a,b ∈ R,<br />
wobei i wobei i ein Symbol ist mit der folgenden Multiplikationstafel<br />
× C 1 i<br />
1 1 i<br />
i i −1<br />
(meist schreibt man i := √ −1). In diesem Fall nennt man a + bi eine komplexe Zahl.<br />
Addition von komplexen Zahlen ist einfach gegeben durch<br />
<strong>und</strong> die komplexe Multiplikation durch<br />
(a + bi) + (c + di) = (a + b) + (c + d)i<br />
(a + bi) × C (c + di) = ac + adi + bci − bd = (ac − bd) + (ad − bc)i<br />
Klaus Johannson, <strong>Geometrie</strong>
§5 <strong>Cartesische</strong> <strong>Geometrie</strong> <strong>II</strong> 33<br />
Die komplexe Multiplikation hat eine Inverses. Etwas allgemeiner gilt:<br />
a + bi<br />
c + di = (a + bi) × C (c − di)<br />
(c + di) × C (c − di)<br />
=<br />
(ac − bd) + (ad − bc)i<br />
c 2 − d 2 .<br />
2. Erklärung für die komplexe Multiplikation. Zum anderen <strong>kann</strong> man die Elemente<br />
von C auch identifizieren mit Matrizen<br />
[<br />
a<br />
−b<br />
]<br />
b<br />
a<br />
In diesem Fall ist die Addition gegeben durch<br />
[ ] [ ] [ ]<br />
a b c d a + c b + d<br />
+ =<br />
−b a −d c −b − d a + c<br />
<strong>und</strong> die komplexe Multiplikation durch das Matrixprodukt<br />
[ ] [ ] [ ]<br />
a b c d ac − bd ad + bc<br />
· =<br />
−b a −d c ad + bc ac − bd<br />
Quaternionen.<br />
Es ist eine bemerkenswerte Tatsache (eine Entdeckung durch Hamilton), dass auch der<br />
R 4 eine Multiplikation hat. Diese macht aus R 4 zwar keinen Körper mehr (denn die<br />
Multiplikation ist nicht kommutativ) aber immerhin noch einen Schiefkörper. Diese Multiplikation<br />
heißt das ”Quaternionenprodukt”. Das Quaternionenprodukt ist gegeben durch<br />
⎡ ⎤ ⎡ ⎤ ⎡<br />
⎤<br />
v 1 w 1 v 1 w 1 − v 2 w 2 − v 3 w 3 − v 4 w 4<br />
⎢v 2 ⎥ ⎢w ⎣ ⎦ × 2 ⎥ ⎢v v Q ⎣ ⎦ = 1 w 2 + v 2 w 1 + v 3 w 4 − v 4 w 3 ⎥<br />
⎣<br />
⎦<br />
3 w 3 v 1 w 3 − v 2 w 4 + v 3 w 1 + v 4 w 2<br />
v 4 w 4 v 1 w 4 + v 2 w 3 − v 3 w 2 + v 4 w 1<br />
<strong>und</strong> es macht aus R 4 den Schiefkörper Q der Quaternionen. Es gibt wieder zwei<br />
Möglichkeiten sich diese eigenartige Definition zu erklären - je nachdem wie man Quaternionen<br />
schreibt.<br />
1. Erklärung für das Quaternionenprodukts. Zum einen <strong>kann</strong> man die Elemente<br />
von Q schreiben als<br />
v 1 e + v 2 i + v 3 j + v 4 k<br />
wobei e,i,j,k Symbole sind mit folgender Multiplikationstafel:<br />
× Q e i j k<br />
e e i j k<br />
i i −e k −j<br />
j j −k −e i<br />
k k j −i −e<br />
Klaus Johannson, <strong>Geometrie</strong>
34 . <strong>Geometrie</strong><br />
Wenn man nun das Produkt<br />
(v 1 c + v 2 i + v 3 j + v 4 k) × Q (w 1 c + w 2 i + w 3 j + w 4 k)<br />
ausrechnet <strong>und</strong> erhält man die obigen Formeln.<br />
2. Erklärung für das Quaternionenprodukt. Zum anderen <strong>kann</strong> man die Elemente<br />
von Q schreiben als Matrizen der Form:<br />
⎡<br />
⎤<br />
⎡ ⎤ v<br />
v 1 −v 2 −v 3 v 4<br />
1<br />
v<br />
⎢v v = 2 ⎥<br />
2 v 1 −v 4 −v 3<br />
[ ]<br />
a −b<br />
⎣ ⎦ = ⎢<br />
⎥<br />
v 3 ⎣<br />
⎦ = , a,b ∈ C.<br />
¯b ā<br />
v<br />
v 3 v 4 v 1 v 2<br />
4<br />
−v 4 v 3 −v 2 v 1<br />
Aus dem Matrixprodukt dieser Matrizen erhält man wieder die obigen Formel für das<br />
Quaternionenprodukt. Mit der Matrixdarstellung <strong>kann</strong> man nun auch die multiplikative<br />
Inversen bestimmen.<br />
Satz. Die Menge Q := {ae + bi + cj + dk | a,b,c,d ∈ R }, zusammen mit der Addition<br />
<strong>und</strong> dem Quaternionen Produkt, ist ein Schiefkörper.<br />
Beweis. Man benutze die obige Tafel. Dann <strong>kann</strong> man alle Axiome eines Schiefkörpers<br />
nachrechnen. ♦<br />
Bemerkung. Es ist i × Q j = −j × Q i. Also Q nicht kommutativ <strong>und</strong> so kein Körper.<br />
Da Q nicht kommutativ ist, macht es Sinn das Zentrum zu betrachten.<br />
Definition. Das Zentrum, Z(G), einer Gruppe G ist definiert durch<br />
Z(G) := { x ∈ G | v × Q x = x × Q v, für alle v ∈ G }<br />
Das Zentrum von Q ( = Gruppe bzgl. des Quaternionenprodukts) besteht also aus all<br />
den Quaternionen, die mit allen Quaternionen vertauschbar sind.<br />
Satz. Z(Q) = Re.<br />
Beweis. Es ist<br />
Z(Q) = ⋃<br />
u∈Q<br />
Z(u),<br />
wobei Z(u) = { x ∈ Q | x × Q u = u × Q x }. Sei u ∈ Q <strong>und</strong> x ∈ Z(u). Dann<br />
ist x × Q u = u × Q x. Weiter gibt es ein r ∈ Re mit u − r ∈ Im(Q). Also o.B.d.A.<br />
Klaus Johannson, <strong>Geometrie</strong>
§5 <strong>Cartesische</strong> <strong>Geometrie</strong> <strong>II</strong> 35<br />
u ∈ Im(Q), da x ∈ Z(u) ⇔ x ∈ Z(u − r). Nach dem gleichen Argument, <strong>kann</strong> man<br />
weiter annehmen, dass u 2 = −e <strong>und</strong> x 2 = −e. Dann folgt aber<br />
so dass x = ±u. ♦<br />
(x − u) × Q (x + u) = x 2 − u × Q x + x × Q u − u 2 = 0,<br />
Einheitssphären.<br />
Die obigen Multiplikationen geben den Einheitssphären in R 2 <strong>und</strong> R 4 eine Gruppenstruktur.<br />
Um dies zu sehen beachte man zunächst, dass man mit Hilfe der komplexen Konjugation<br />
eine komplexe Norm definieren <strong>kann</strong>:<br />
¯. : C → C, a + bi ↦→ a − bi,<br />
|z| := (z × C ¯z) 1/2 .<br />
Wenn z = a + bi, dann ist |z| = (a 2 + b 2 | 1/2 . Also ist<br />
S 1 := {v ∈ R 2 | ‖ v ‖= 1} = {z ∈ C | z × C ¯z = 1 }.<br />
Satz. Die Einheitssphäre S 1 ⊂ C ist abgeschlossen gegenüber der komplexen Multiplikation.<br />
Weiter ist (S 1 , × C ) eine Gruppe.<br />
Beweis. Seien z 1 ,z 2 ∈ S 1 . Dann gilt<br />
(z 1 × C z 2 ) · z 1 × C z 2 = z 1 × C z 2 × C ¯z 1 × C ¯z 2 = z 1 × C ¯z 1 × C z 2 × C ¯z 2 = 1 · 1 = 1<br />
Die Gruppenaxiome rechnet man leicht nach. Dies beweist den Satz. ♦<br />
Für Quaternionen hat man auch eine Quaternionen Konjugation - definiert durch<br />
¯. : Q → Q, ae + bi + cj + dk ↦→ ae − bi − cj − dk<br />
Mit dieser Konjugation definiert man die Norm<br />
|v| := (v × Q ¯v) 1/2<br />
für Quaternionen. Dies ist wieder nichts Neues, denn man rechnet schnell nach, dass<br />
⎡ ⎤ ⎡ ⎤ ⎡<br />
⎤<br />
v 1 v 1 +v 1 v 1 + v 2 v 2 + v 3 v 3 + v 4 v 4<br />
⎢v 2 ⎥ ⎢ −v<br />
⎣ ⎦ × 2 ⎥ ⎢ −v<br />
v Q ⎣ ⎦ = 1 v 2 + v 2 v 1 − v 3 v 4 + v 4 v 3<br />
⎣<br />
3 −v 3 −v 1 v 3 + v 2 v 4 + v 3 w 1 − v 4 v 2<br />
v 4 −v 4 −v 1 v 4 − v 2 v 3 + v 3 v 2 + v 4 v 1<br />
⎥<br />
⎦ =<br />
⎡<br />
⎢<br />
⎣<br />
v 2 1 + v 2 2 + v 2 3 + v 2 4<br />
0<br />
0<br />
0<br />
⎤<br />
⎥<br />
⎦.<br />
Klaus Johannson, <strong>Geometrie</strong>
36 . <strong>Geometrie</strong><br />
Also ist<br />
v × Q ¯v = ¯v × Q v = (v · v)e,<br />
d.h. nichts weiter als die gewöhnliche Norm in R 4 . Also ist<br />
S 3 := {v ∈ R 4 | ‖ v ‖= 1 } = { h ∈ H | |h| = 1 } ⊂ H.<br />
Hieraus ergibt sich weiter die folgende Identität:<br />
Lemma. 2(v · w)e = v × Q ¯w + w × Q ¯v.<br />
Beweis.<br />
(v · v + 2v · w + w · w)e = ((v + w) · (v + w))e (das Skalarprodukt ist kommutativ)<br />
= (v + w) × Q v + w (siehe oben)<br />
= (v + w) × Q (¯v + ¯w)<br />
= v × Q ¯v + v × Q ¯w + w × Q ¯v + w × Q ¯w<br />
= (v · v)e + (w · w)e + v × Q ¯w + w × Q ¯v<br />
<strong>und</strong> so folgt das Lemma. ♦<br />
Satz. Die Einheitssphäre S 3 ⊂ H ist abgeschlossen gegenüber dem Quaternionenprodukt<br />
(aber nicht gegenüber der Addition). Weiter ist (S 3 , × Q ) eine Gruppe.<br />
Beweis. Man rechnet zunächst schnell nach, dass<br />
v × Q w = ¯w × Q ¯v<br />
(man beachte, dass v <strong>und</strong> w hier vertauscht wurden). Dann gilt<br />
|v × Q w| 2 = (v × Q w) × Q (v × Q w)<br />
= ( ¯w × Q ¯v) × Q (v × Q w) (wir haben hier vertauscht)<br />
= ¯w × Q (¯v × Q v) × Q w (das Quaternionenprodukt ist assoziativ)<br />
= ¯w × Q (v · v)e × Q w (siehe oben)<br />
= (v · v)( ¯w × Q w)<br />
= (v · v)(w · w)e = |v| 2 |w| 2 .<br />
Also v × Q w ∈ S 3 , für alle v,w ∈ S 3 .<br />
Die Gruppenaxiome rechnet man leicht nach. ♦<br />
Klaus Johannson, <strong>Geometrie</strong>