download .pdf - HANSER automotive
download .pdf - HANSER automotive
download .pdf - HANSER automotive

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
© Carl Hanser Verlag, München www.hanser-<strong>automotive</strong>.de Nicht zur Verfügung im Intranet- und Internet-Angeboten sowie elektronischen Verteilern<br />
20lA UTOMOTIVE<br />
5-6.2007l KOMPONENTEN<br />
Neue integrierte<br />
GMR-Sensoren<br />
Die Einführung intelligenter und widerstandsfähiger Sensoren zur<br />
Erfassung absoluter Winkelpositionen mit hohen Anforderungen<br />
an Genauigkeit und schneller Datenausgabe sind Schlüsselfaktoren,<br />
um die wachsenden Anforderungen und Erwartungen der<br />
Automobilhersteller zu erfüllen. Die Integrationsfähigkeit von<br />
GMR-Brücken in etablierte Halbleiterprozesse erlaubt eine<br />
schnelle Umsetzung. Damit bietet die I-GMR-Technologie eine<br />
interessante Alternative zu bestehenden Sensorprinzipien.<br />
NEUE MAGNETSENSOREN MIT<br />
VERBESSERTER PHASENGENAUIGKEIT<br />
UND GRÖßEREM LUFTSPALT<br />
Üblicherweise werden im Automobil für die Drehzahlmessung<br />
ferromagnetische Zahn- oder Polräder<br />
eingesetzt. Die Form und Verarbeitungsqualität<br />
der Zahnräder beeinflusst natürlich auch die Signalqualität<br />
und ist daher in den jeweiligen Anwendungen<br />
an die Anforderungen anzupassen. Daher entstehen<br />
viele verschiedene Signalformen, die ein Sensor verarbeiten<br />
muss. Die typische Arbeitstemperatur liegt für<br />
Drehzahlsensoren im Bereich von -40 bis +150 °C. Oft<br />
müssen sie dabei einen Frequenzbereich bis 12 kHz<br />
abdecken und innerhalb eines Luftspaltes von 3,5 mm<br />
arbeiten. Außerdem erfordern einige Anwendungen<br />
eine Drehrichtungserkennung.<br />
Genauigkeit und Geschwindigkeit sind die Triebkräfte für<br />
innovative Magnetsensorapplikationen im Bereich Positions-<br />
und Winkelsensorik. Die Einführung intelligenter und<br />
widerstandsfähiger Sensoren zur Erfassung absoluter Winkelpositionen<br />
im Antriebsstrang wie z. B. bei der Drosselklappe<br />
oder bei Pedalpositionen, aber auch in Sicherheitsapplikationen<br />
wie Lenkwinkel- oder Sitzbelegungserfassung<br />
mit ihren hohen Anforderungen an Genauigkeit und<br />
schneller Datenausgabe sind Schlüsselfaktoren, um die<br />
wachsenden Anforderungen und Erwartungen zu erfüllen.<br />
Neuer Lösungsansatz für<br />
Drehzahlsensoren<br />
Die auf dem integrierten Giant-Magneto-Resistive (I-GMR)-<br />
Effekt basierenden Drehzahlsensoren erfüllen die oben<br />
angeführten Anforderungen. Diese Sensoren beinhalten<br />
auch ein weiterentwickeltes Schaltungskonzept. Dieses
© Carl Hanser Verlag, München www.hanser-<strong>automotive</strong>.de Nicht zur Verfügung im Intranet- und Internet-Angeboten sowie elektronischen Verteilern<br />
HOCHINTEGRIERTER LED-TREIBER<br />
EIGNET SICH IDEAL FÜR KFZ-<br />
APPLIKATIONEN<br />
3-kanaliger Lineartreiber für hohe Betriebsspannungen mit LED-Ausfallerkennung<br />
GESCHÜTZT GEGEN 45V<br />
SPANNUNGSSPITZEN<br />
LED-AUSFALLERKENNUNG<br />
AUCH BEI AKTIVER<br />
DIMMUNG<br />
5,5V BIS 40V<br />
Flexibel<br />
♦Programmierbarer LED-Konstantstrom<br />
(bis zu 70mA, 2A mit externem Transistor)<br />
♦±5% LED-Stromgenauigkeit<br />
♦Niedriger Spannungsabfall (max. 0,7V)<br />
♦Integrierter +3,4V/4mA Spannungsregler<br />
IN<br />
16-TSSOP-EP<br />
6,4 m m<br />
DIM1<br />
DIM2<br />
DIM3<br />
LEDGOOD<br />
x<br />
5 m m<br />
MAX16823<br />
5 m m<br />
OUT1<br />
OUT2<br />
OUT3<br />
REG<br />
CS1+<br />
CS2+<br />
CS3+<br />
16-TQFN<br />
x<br />
5 m m<br />
3,4V<br />
LEDs<br />
LEDs<br />
Robust<br />
♦Unterspannungs-Abschaltung<br />
♦Kurzschluss-Schutz<br />
♦Thermischer Überlastschutz<br />
♦Betriebstemperatur<br />
-40°C bis +125°C<br />
R1<br />
R2<br />
R3<br />
LEDs<br />
LINEARTREIBER UND<br />
KONTROLLIERTE<br />
DIMMERWELLENFORM<br />
MINIMIEREN EMI<br />
EVALUATIONS-KIT<br />
ERHÄLTLICH<br />
UNABHÄNGIGE<br />
STROMEINSTELLUNG<br />
JEDER LED-KETTE<br />
Weitere Informationen zu unseren LED-Treibern finden Sie<br />
unter: www.maxim-ic.com/HB-LED<br />
/<br />
DIRECT<br />
DISTRIBUTION<br />
Austria: 0800-292-014<br />
Germany: 0800-8279250-242<br />
Switzerland: 0800-862946<br />
Anwendungen<br />
♦Kfz-Leuchten<br />
(Rückleuchten, dritte<br />
Bremsleuchte, RGB-<br />
Armaturenbeleuchtung)<br />
♦Warnleuchten<br />
♦LCD-Hintergrundbeleuchtung<br />
www.maxim-ic.com/MAX16823-info<br />
KOSTENLOS: Automotive Design Guide – Verschickt innerhalb von 24h!<br />
Rufen Sie uns an um weitere Unterlagen oder Muster zu erhalten: Tel 0800-8279250-242<br />
Das Maxim Logo ist ein eingetragenes Warenzeichen von Maxim Integrated Products, Inc. Das Dallas Semiconductor Logo ist ein eingetragenes Warenzeichen von Dallas Semiconductor Corp.<br />
© 2007 Maxim Integrated Products, Inc. Alle Rechte vorbehalten.
© Carl Hanser Verlag, München www.hanser-<strong>automotive</strong>.de Nicht zur Verfügung im Intranet- und Internet-Angeboten sowie elektronischen Verteilern<br />
22lA UTOMOTIVE<br />
5-6.2007l KOMPONENTEN<br />
Konzept ermöglicht die Verwendung derselben Schaltungsarchitektur<br />
für verschiedene Anwendungen. Grundsätzlich<br />
werden nur mehr das digitale Schaltungskonzept<br />
und die Ausgangsstufe der Applikation angepasst. Im Falle<br />
einer Drehrichtungserkennung wird ein zusätzlicher Multiplexer<br />
und ein weiterer GMR-Widerstand genutzt. Der<br />
GMR-Effekt führt zu einem besseren Signal-zu-Rausch-<br />
Abstand, was sich in einer geringeren Signalverstärkung<br />
aber auch einer guten Reproduzierbarkeit niederschlägt.<br />
GMR-Spin-Valves-Sensoren basieren auf einer Drei-Lagen-<br />
Anordnung (Bild 1). Die Dicke der Trennschicht (spacer<br />
layer) ist so gestaltet, dass es eine geringe Kopplung gibt.<br />
Eine Schicht (pinned layer) ist hart magnetisch eingeprägt.<br />
Die andere Schicht (free layer) passt sich in der Orientierung<br />
dem externen Feld an. Es entsteht nun eine Widerstandsänderung,<br />
die durch den Winkel zwischen freier und harter<br />
Schicht bestimmt ist. Diese Widerstandsänderung wird<br />
nun typischerweise über eine Brückenschaltung ausgewertet.<br />
Die Empfindlichkeit der GMR-Brücke kann zusätzlich<br />
noch über die Breite der GMR Streifen angepasst werden.<br />
Die unteren Halbleiterschichten werden in einem qualifizierten<br />
und erprobten Standardprozess erzeugt. In den folgenden<br />
Beispielen handelt es sich um einen 0,5-µm-Bi-<br />
CMOS-Prozess, der bereits für Hall-Sensoren seit mehreren<br />
Jahren im Einsatz ist. Die GMR-Schichten werden auf<br />
den vorgefertigten Wafer aufgebracht. Diese Kompatibilität<br />
erlaubt schnelle Entwicklungszeiten und reduziert auch das<br />
Entwicklungsrisiko.<br />
ABS-Raddrehzahlsensor<br />
Im ABS-Drehzahlfühler-Bereich sind kontaktlose und robuste<br />
magnetische Messverfahren ideal geeignet, da es<br />
weder eine Abnützung des Zahnrades gibt, noch Schmutz<br />
oder Feuchtigkeit die magnetische Feldstärke beeinträchtigt.<br />
GMR-Sensoren benötigen hier keinen externen Magneten<br />
zur Stabilisierung, wie er für AMR-Sensoren üblich<br />
GMR-EFFEKT<br />
Im Gegensatz zur ›normalen‹ magnetischen Widerstandsänderung<br />
beruht der 1988 von Peter Grünberg u. a. am Forschungszentrum Jülich<br />
(sowie unabhängig davon von einer französischen Arbeitsgruppe) entdeckte<br />
Giant Magneto Resistance- (GMR)-Effekt auf der magnetischen<br />
Ordnung der Elektronenspins in einem äußeren magnetischen Feld.<br />
Dabei nutzt man mindestens zwei magnetische Schichten, die parallel<br />
zueinander angebracht werden, und eine Zwischenschicht, die präpariert<br />
ist, wobei sich der Widerstand einer solchen Schichtung ändert. Für<br />
einen Strom, der in der Schichtebene fließt, ändert sich der Widerstand<br />
der Multilagenschichten in Abhängigkeit von der relativen Ausrichtung<br />
der Magnetisierung in den beiden Schichten. Dieser Effekt ist am größten,<br />
wenn die beiden Schichten antiparallel magnetisiert, und am kleinsten,<br />
wenn sie parallel zueinander magnetisiert sind. Der GMR-Effekt<br />
wird in Leseköpfen von Festplatten und für Sensoren zur Weg-, Winkeloder<br />
Drehzahlmessung genutzt. Nichtflüchtige magnetische Datenspeicher<br />
mit wahlfreiem Zugriff (MRAM) auf der Basis des GMR-Effekts<br />
existieren als Prototypen.<br />
ist. Dies hilft gerade bei den üblichen Polrädern die Systemkosten<br />
zu reduzieren und Abmessungen zu minimieren.<br />
Der GMR-Effekt ist das empfindlichste magnetische Messprinzip,<br />
das in einem Fahrzeug angewendet wird und übertrifft<br />
den Halleffekt etwa um den Faktor 5 bis 10. Es können<br />
Bild 1: Prinzipieller GMR-Spin-Valve-Aufbau.<br />
© <strong>automotive</strong><br />
daher mit herkömmlichen Geberrädern deutlich größere<br />
Luftspalte realisiert werden. Ein Kostenreduzierungspotential<br />
stellt die Möglichkeit der Verwendung billigerer magnetischer<br />
Polräder mit schwächerer Magnetisierung dar. Erste<br />
Muster eines I-GMR ABS-Drehzahlsensor von Infineon<br />
sind verfügbar (TLE5041C).<br />
Kurbelwellensensor<br />
Das Kurbelwellensensorsignal wird zur Steuerung der<br />
Zündzeitpunkte verwendet. Deshalb werden an die<br />
Wiederhol- und Phasengenauigkeit des Sensors besonders<br />
hohe Anforderungen gestellt. Wichtigster Vorteil von GMR<br />
im Vergleich zu Hall-Sensoren ist hier die verbesserte<br />
Wiederhol- und Phasengenauigkeit. Zusätzlich ist der temperatur-<br />
und frequenzabhängige Drift bei I-GMR äußerst<br />
gering. Bei Motor-Start/Stopp-Betrieb gibt es auch<br />
den Wunsch, die Drehrichtung des Motors zu erfassen.<br />
Hierfür wird ein drittes GMR-Element auf den<br />
Chip implementiert und in das Ausgangssignal aufgenommen.<br />
In dem Kurbelwellen-Segment werden demnächst<br />
erste Muster des TLE5025 von Infineon auf I-GMR-<br />
Basis verfügbar sein.<br />
Getriebesensoren<br />
Die Anforderungen an Getriebesensoren sind aufgrund<br />
der verschiedenen automatisierten Getriebetypen<br />
sehr unterschiedlich. Zusätzlich gibt es einen<br />
sehr starken Einfluss der Einbausituation und Geometrie<br />
auf die Sensoranforderungen. Als Beispiel<br />
kann man hier große Luftspalten anführen, die durch<br />
die Getriebeform und Anordnung der Zahnräder<br />
festgelegt werden. In Luftspaltbereichen >5 mm<br />
wird der Einsatz von Hall-basierenden Sensoren<br />
schwierig. Hier wurden in der Vergangenheit bereits<br />
mehrheitlich AMR-Typen (Anisotropic Magnetic<br />
Resistance) eingesetzt. Als Beispiel sei ein 7-Gang-
Zündungstechnik<br />
Kompetenz im Automobil, Teil 4<br />
Dieselkaltstarttechnologie & Sensorik<br />
Elektronik<br />
© Carl Hanser Verlag, München www.hanser-<strong>automotive</strong>.de Nicht zur Verfügung im Intranet- und Internet-Angeboten sowie elektronischen Verteilern<br />
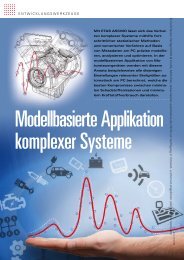
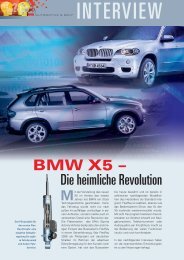
BERU PSG-Glühkerze (mit integriertem<br />
Brennraumsensor): zukunftsweisend<br />
in der Emissionsreduktion<br />
■ Zuverlässige Messung des<br />
Brennraumdrucks unter Serienbedingungen<br />
■ Hohe Genauigkeit und Langzeitstabilität<br />
■ Ermöglicht erstmals den Serieneinsatz<br />
von Closed-Loop-<br />
Regelungen im Dieselmotor<br />
■ Druckmesselemente ohne direkten<br />
Brennraumkontakt<br />
■ Trägt zur Einhaltung der<br />
Emissionsvorschriften Euro IV,<br />
Euro V, Tier II und LEV II bei<br />
■ Mit piezoresistivem Drucksensor<br />
■ Messbereich bis zu 200 bar<br />
Die innovative BERU Drucksensor-Glühkerze PSG (Pressure Sensor Glowplug)<br />
www.beru.com<br />
Diese Glühkerze<br />
reagiert auf<br />
Druck. Prompt.<br />
Diese Glühkerze ist mit einem Drucksensor ausgestattet. So kann sie – neben ihrer<br />
Aufgabe des Vor-, Nach- oder Zwischenglühens – den realen Brennraumdruck ermitteln.<br />
Ermöglicht wird dies durch einen im Glühkerzenkörper elastisch gelagerten,<br />
beweglichen Heizstab, der den Druck auf eine Metallmembran mit einer Messbrücke<br />
überträgt. Diese Signale werden von einem eigens hierfür entwickelten ASIC aus<br />
gewertet. Wenn auch Sie an intelligenten Glühkerzen interessiert sind und wissen wollen,<br />
wie innovative Dieselkaltstarttechnologie die Schadstoffemission Ihrer Motoren<br />
optimieren kann, rufen Sie uns an: ++49-7141-132-235. Oder senden Sie uns eine<br />
Mail: technology@beru.de.<br />
BERU GEWINNER<br />
INNOVATION AWARD 2006<br />
Der Spezialist für<br />
Zündungstechnik,<br />
Dieselkaltstarttechnologie,<br />
Elektronik und Sensorik
© Carl Hanser Verlag, München www.hanser-<strong>automotive</strong>.de Nicht zur Verfügung im Intranet- und Internet-Angeboten sowie elektronischen Verteilern<br />
24lA UTOMOTIVE<br />
Getriebe genannt, das neben einem differentiellen Hall-<br />
Sensor auch zwei AMR-Sensoren mit einem Arbeitsluftspalt<br />
von bis zu 8 mm verwendet. Die zwei AMR-Sensoren<br />
messen hierbei die Turbinendrehzahl mittels eines Polrades.<br />
Der Einsatz von zwei Sensoren erklärt sich aus dem<br />
schwierigen Umfeld aus Luftspalt und Temperatur, das eine<br />
redundante Information notwendig macht. Genau hier bietet<br />
sich nun ein Übergang auf I-GMR basierende Sensoren<br />
an. Diese erlauben auf Grund der höheren Empfindlichkeit<br />
einerseits den Verzicht auf Redundanz und anderseits eine<br />
Kostenreduktion des Polrades.<br />
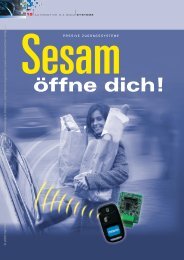
Bild 2: Blockdiagramm für die Winkelberechnung.<br />
5-6.2007l KOMPONENTEN<br />
Eine Drehrichtungserkennung wird in verschiedenen<br />
Getriebearten bzw. Zusatzfunktionen (Anfahrhilfen, Rückwärtsgangerkennung)<br />
gefordert. Hier bietet GMR ein exakteres<br />
Drehzahlsignal an und erlaubt damit auch eine Verbesserung<br />
in der Erkennung von Vibrationen.<br />
I-GMR Winkel-Sensor<br />
Die sensitiven Bereiche der GMR-Brücke ändern ihren<br />
Widerstand jeweils in Abhängigkeit der Magnetfeldänderung<br />
zur Referenzschicht. Diese Änderungen können dann<br />
ihrerseits herangezogen werden, um die genaue Ausrichtung<br />
des Magnetfelds zu bestimmen. Die einfachste Möglichkeit,<br />
die Magnetfeldausrichtung zu bestimmen, ist, den<br />
Winkel aus der Sinus- und Kosinus-Komponente des Magnetfelds<br />
zu bestimmen. Entscheidend ist hierbei, dass nur<br />
die Richtung des Magnetfeldes zu einer Änderung führt, die<br />
absolute Größe des Feldes aber keinen Einfluss hat.<br />
Die beiden Werte für X und Y werden als Spannungen der<br />
beiden GMR-Brücken gemessen, deren Referenzschichten<br />
senkrecht zueinander angeordnet sind. X steht hierbei für<br />
die Kosinus- und Y für die Sinus-Komponente der Kreiskoordinaten<br />
des Winkelsignals. Diese Gleichung ist selbstverständlich<br />
nur gültig für einen Winkelbereich von -90° bis<br />
+90°. Alle Winkel über diesen Bereich hinaus müssen erst<br />
in diesen Winkelbereich umgerechnet werden. Ein sehr<br />
wichtiger Punkt ist die Ungenauigkeit der konvertierten<br />
Winkelkomponenten X und Y. Die hauptsächlichen Fehler<br />
wie Amplitudenfehler und Offsetfehler können mittels<br />
arithmetischer Operationen korrigiert werden. Der Offsetfehler<br />
kann von den X- und Y-Komponenten subtrahiert und<br />
die Amplitudenvariation durch Multiplikation eliminiert<br />
werden.<br />
Grundsätzlich kann der Datenstrom in zwei Hauptteile<br />
untergliedert werden: einen analogen sowie einen digitalen<br />
Signalverarbeitungsbereich. Der analoge Teil besteht<br />
aus einer analogen Signalerzeugung (GMR-Spannungen),<br />
einer Vorkonditionierung sowie der Analog-Digital-Wandlung.<br />
Der digitale Bereich besteht aus einer ausstattungsabhängigen<br />
digitalen Signalverarbeitung, einer Winkelberechnung<br />
und einer Signalnachverarbeitung, so z. B. für ein<br />
spezielles Interface. (Bild 2)<br />
Der analoge Abschnitt beinhaltet die Blöcke auf der linken<br />
Hälfte des Schemas bis hin zum Analog-Digital-Wandler,<br />
der die Daten in den digitalen Bereich<br />
umsetzt. Die Winkelberechnung selbst benötigt<br />
beide Komponenten X und Y. Der errechnete<br />
Winkel wird danach noch bezüglich Skalierung<br />
und Offset angepasst.<br />
© <strong>automotive</strong><br />
In Infineons derzeit verfügbarem Produkt TLE<br />
5010 wird die Signalaufbereitung bis zum<br />
Post-Processing durchgeführt. Die Winkelberechnung<br />
findet im dahinterliegenden Mikrocontroller<br />
statt. Solche Systeme werden beispielsweise<br />
im Bereich der Lenkwinkelerfassung<br />
aufgebaut. Zukünftige Produkte werden<br />
auch über eine integrierte Winkelberechnung<br />
verfügen.<br />
Zusammenfassung<br />
Im Bereich der Drehzahlmessung bietet der GMR-Effekt<br />
gegenüber anderen Technologien Vorteile im Bereich der<br />
Empfindlichkeit. Dieser Vorteil kann unterschiedlich genutzt<br />
werden: der Arbeitsluftspalt kann erhöht, die relative Phasengenauigkeit<br />
verbessert oder die Kosten des Magnetkreises<br />
reduziert werden. Zusätzlich bietet ein innovatives<br />
Schaltungskonzept einen klaren, deterministischen Signalpfad.<br />
Ansätze zur Winkel- und Positionserfassung mit I-GMR<br />
wurden vorgestellt. Die ersten Produkte sind bereits im<br />
Serieneinsatz. In Zukunft wird es möglich sein, mit einer<br />
intelligenten Recheneinheit direkt Winkelwerte auszugeben<br />
und somit neue Anwendungen zu erschließen.<br />
Die Integrationsfähigkeit der GMR-Brücken in etablierte<br />
Halbleiterprozesse ermöglicht eine schnelle Umsetzung.<br />
Damit bietet die I-GMR-Technologie eine interessante<br />
Alternative zu bestehenden Sensorprinzipien. (oe)<br />
Ernst Katzmaier, Manager Application<br />
Engineering, Powertrain & Magnetics,<br />
Sense & Control, Infineon Technologies<br />
E-Mail: ernst.katzmaier@infineon.com<br />
Infineon Technologies<br />
@ www.infineon.com
© Carl Hanser Verlag, München www.hanser-<strong>automotive</strong>.de Nicht zur Verfügung im Intranet- und Internet-Angeboten sowie elektronischen Verteilern<br />
Komponenten für wegweisende automobile Anwendungen<br />
Ohne Umweg<br />
zum Erfolg<br />
Gesteigerte Sicherheit, schnellere Information, optimierte Kontrolle<br />
– mit Schlüsselkomponenten von Sharp bringen Entwickler<br />
ihre Projekte auf die Überholspur. Starten Sie neue, faszinierende<br />
Anwendungen im Armaturendesign und in der Komfortelektronik.<br />
Steuern Sie Ihr innovatives Car-Infotainment an die Spitze. Lenken<br />
Sie Ihre intelligenten Fahrzeuginnenraum-Konzepte zum Erfolg. Erzielen<br />
Sie mit Ihren modernen Fahrer-Informationssystemen tech -<br />
nologischen Vorsprung. Mit Sharp erfahren Sie neue Design-Möglichkeiten<br />
zum Beispiel durch OPIC Helligkeitssensoren, High-<br />
Contrast TFT Displays, Photointerrupters und der Triple<br />
Directional Viewing Technologie.<br />
Unser Team berät Sie gern. E-Mail: infosme@seeg.sharp-eu.com;<br />
Telefon: +49 (0)180 507 35 07 (0,14 /Min. aus dem Festnetz der DTAG.)