2 Mechanische Schwingungen
2 Mechanische Schwingungen
2 Mechanische Schwingungen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2. <strong>Mechanische</strong> <strong>Schwingungen</strong><br />
2.1 Definitionen und Grundbegriffe<br />
2.1.1 Harmonische Schwingung<br />
Unter einer Schwingung versteht man einen periodisch ablaufenden Vorgang. Beispiele hierfür sind<br />
Pendel, Schiffschaukel, Kolben im Verbrennungsmotor, Erddrehung<br />
Führt ein Körper eine periodische Bewegung aus, so heißt diese Schwingung mechanisch. Ändert sich<br />
dabei nur eine Koordinate mit der Zeit, so heißt die Schwingung linear.<br />
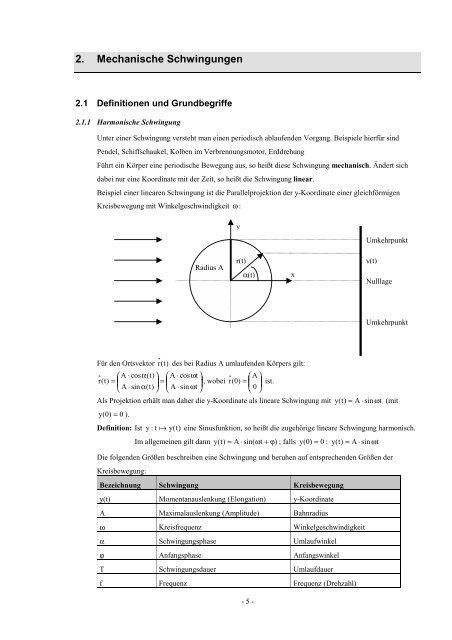
Beispiel einer linearen Schwingung ist die Parallelprojektion der y-Koordinate einer gleichförmigen<br />
Kreisbewegung mit Winkelgeschwindigkeit ω :<br />
Radius A<br />
Für den Ortsvektor r ( t)<br />
des bei Radius A umlaufenden Körpers gilt:<br />
⎛A<br />
⋅ cosα(<br />
t)<br />
⎞ ⎛A<br />
⋅ cosωt<br />
⎞<br />
r ( t)<br />
= ⎜<br />
⎟ = ⎜<br />
⎟ , wobei<br />
⎝ A ⋅ sin α(<br />
t)<br />
⎠ ⎝ A ⋅ sin ωt<br />
⎟<br />
⎠<br />
⎟<br />
⎛A<br />
⎞<br />
r ( 0)<br />
= ⎜ ist.<br />
⎝ 0 ⎠<br />
Als Projektion erhält man daher die y-Koordinate als lineare Schwingung mit y( t)<br />
= A ⋅ sin ωt<br />
(mit<br />
y ( 0)<br />
= 0 ).<br />
Definition: Ist y : t ! y(<br />
t)<br />
eine Sinusfunktion, so heißt die zugehörige lineare Schwingung harmonisch.<br />
Im allgemeinen gilt dann y( t)<br />
= A ⋅ sin( ωt<br />
+ ϕ)<br />
; falls y ( 0)<br />
= 0 : y( t)<br />
= A ⋅ sin ωt<br />
Die folgenden Größen beschreiben eine Schwingung und beruhen auf entsprechenden Größen der<br />
Kreisbewegung:<br />
Bezeichnung Schwingung Kreisbewegung<br />
y(t) Momentanauslenkung (Elongation) y-Koordinate<br />
A Maximalauslenkung (Amplitude) Bahnradius<br />
ω Kreisfrequenz Winkelgeschwindigkeit<br />
α Schwingungsphase Umlaufwinkel<br />
ϕ Anfangsphase Anfangswinkel<br />
T Schwingungsdauer Umlaufdauer<br />
f Frequenz Frequenz (Drehzahl)<br />
y<br />
r(t)<br />
α(t)<br />
- 5 -<br />
x<br />
Umkehrpunkt<br />
y(t)<br />
Nulllage<br />
Umkehrpunkt
Zur Erinnerung:<br />
0<br />
ω =<br />
2π<br />
2 π ⋅ f = ⇔ f =<br />
T<br />
1<br />
T<br />
Experiment: Messung von T für Faden- und Federpendel (mind. 10 Vollschwingungen)<br />
2.1.2 Geschwindigkeit und Beschleunigung<br />
Aus der Ortskoordinate y( t)<br />
= A ⋅ sin( ωt<br />
+ ϕ)<br />
ergibt sich die Momentangeschwindigkeit v als Ableitung:<br />
∆y<br />
v(<br />
t)<br />
= lim = y"<br />
( t)<br />
= ( A ⋅ sin( ωt<br />
+ ϕ)<br />
) " ⇒ v(<br />
t)<br />
= A ⋅ ω⋅<br />
cos( ωt<br />
+ ϕ)<br />
∆t→0<br />
∆t<br />
Für die Momentanbeschleunigung a folgt:<br />
∆v<br />
2<br />
2<br />
a(<br />
t)<br />
= lim = v"<br />
( t)<br />
= ( A ⋅ ω ⋅ cos( ωt<br />
+ ϕ)<br />
" ) ⇒ a(<br />
t)<br />
= −A<br />
⋅ ω ⋅ sin( ωt<br />
+ ϕ)<br />
⇒ a(<br />
t)<br />
= −ω<br />
⋅ y(<br />
t)<br />
∆t→0<br />
∆t<br />
Die Beschleunigung ist also stets zur Auslenkung y entgegengesetzt gerichtet; sie zeigt somit immer zur<br />
Nulllage hin. Die verursachende Kraft F( t)<br />
= m ⋅ a(<br />
t)<br />
heißt daher rücktreibende Kraft.<br />
2 2<br />
Es gilt F(<br />
t)<br />
= −m<br />
⋅ ω ⋅ y(<br />
t)<br />
. Da k : = m ⋅ ω konstant ist, gilt zu jedem Zeitpunkt t F ( t)<br />
~ y(<br />
t)<br />
.<br />
Umgekehrt: Ist bei einer Schwingung die rücktreibende Kraft F proportional zur Auslenkung y, so ist die<br />
Schwingung harmonisch.<br />
Begründung: Die Differenzialgleichung m ⋅ a(<br />
t)<br />
= −k<br />
⋅ y(<br />
t)<br />
⇔ m ⋅ " y"<br />
( t)<br />
= −k<br />
⋅ y(<br />
t)<br />
mit k > 0 besitzt als<br />
Lösungen nur Sinusfunktionen (vgl. 2.2).<br />
2.1.3 Aufgaben<br />
y(t)<br />
T<br />
S.114/1 (Hammer); TR auf RAD!<br />
10s<br />
Geg.: m = 50g;<br />
T = = 1,<br />
25s;<br />
A = 9,<br />
0cm<br />
(! )<br />
8<br />
a)<br />
2π<br />
2π<br />
y ( t)<br />
= A ⋅ sin ωt<br />
⇒ y(<br />
t)<br />
= 9,<br />
0cm<br />
⋅ sin( ⋅ t)<br />
⇒ y(<br />
8s)<br />
= 9,<br />
0cm<br />
⋅ sin( ⋅8s)<br />
= 5,<br />
3cm<br />
1,<br />
25s<br />
1,<br />
25s<br />
Zusatz: Zu welchen Zeitpunkten befindet sich der Körper 4,0cm unterhalb der Nulllage?<br />
y<br />
y = A ⋅ sin ωt<br />
⇔ sin ωt<br />
=<br />
A<br />
y<br />
⇔ ωt<br />
= arcsin<br />
A<br />
1 y T y<br />
⇔ t = ⋅ arcsin ⇔ t = ⋅ arcsin<br />
ω A 2π<br />
A<br />
1,<br />
25s<br />
−4<br />
t = ⋅ arcsin = −0,<br />
092s<br />
(Hilfswert)<br />
2π<br />
9<br />
Aus Graphen der Sinusfunktion:<br />
- 6 -<br />
t
)<br />
t 1<br />
T<br />
= + 0,<br />
092s<br />
= 0,<br />
72s<br />
(abwärts)<br />
2<br />
t 2 = T − 0,<br />
092s<br />
= 1,<br />
16s<br />
(aufwärts)<br />
= T + t = 1,<br />
97s<br />
= T + t = 2,<br />
41s<br />
t3 1<br />
- 7 -<br />
t 4 2<br />
Allgemein:<br />
T<br />
T<br />
t 2k−<br />
1 = ( 2k<br />
−1)<br />
⋅ − t<br />
t 2 k = 2k<br />
⋅ + t<br />
2<br />
2<br />
2π<br />
2π<br />
cm m<br />
v( 8s)<br />
= 9cm<br />
⋅ ⋅ cos( ⋅8s)<br />
= −37<br />
= −0,<br />
37<br />
1,<br />
25s<br />
1,<br />
25s<br />
s s<br />
2<br />
2π<br />
2<br />
4π<br />
cm<br />
−2<br />
m<br />
a(<br />
8s)<br />
= −(<br />
) ⋅ y(<br />
8s)<br />
= − ⋅ 5,<br />
3cm<br />
= −1,<br />
33 = −1,<br />
3 ⋅10<br />
2<br />
2<br />
2<br />
1,<br />
25s<br />
( 1,<br />
25s)<br />
s<br />
s<br />
c)<br />
m<br />
v max = A ⋅ ω ⇒ vmax<br />
= 0,<br />
45 ;<br />
s<br />
a max<br />
2<br />
= A ⋅ ω<br />
m<br />
⇒ a max = 2,<br />
3<br />
2<br />
s<br />
d) v = vmax<br />
, falls<br />
T<br />
cosωt<br />
= 1 ⇔ t = k ⋅ ( mit k ∈N<br />
0 ) (Durchgang durch Nulllage)<br />
2<br />
a = a max , falls<br />
T<br />
sin ωt<br />
= 1 ⇔ t = ( 2k<br />
+ 1)<br />
⋅ ( mit k ∈N<br />
0 ) (an den Umkehrpunkten)<br />
4<br />
e)<br />
−2<br />
FR<br />
( 8s)<br />
= m ⋅ a(<br />
8s)<br />
⇒ FR<br />
= −6,<br />
7 ⋅10<br />
N<br />
F ist maximal, wenn a maximal ist: N 11 , 0 F a m = ⋅ ⇒ =<br />
f) R<br />
2.2 Beispiele harmonischer <strong>Schwingungen</strong><br />
2.2.1 Federpendel<br />
Fmax max max<br />
An einer Hookschen Schraubenfeder der Federkonstanten D<br />
hängt ein Körper der Masse m. Dessen Gewichtskraft<br />
bestimmt zunächst die Nulllage.<br />
Nach Auslenken von m nach unten führt der Körper eine<br />
Schwingung durch mit der rücktreibenden Kraft = −D<br />
⋅ y<br />
(Hooksches Gesetz). Da D konstant ist, ist die Schwingung<br />
wegen FR ~ y harmonisch. Es gilt also: m ⋅ a(<br />
t)<br />
= −D<br />
⋅ y(<br />
t)<br />
.<br />
Mit a ( t)<br />
= " y"<br />
( t)<br />
ergibt sich die Differenzialgleichung<br />
m ⋅ " y"<br />
( t)<br />
= −D<br />
⋅ y(<br />
t)<br />
. Eine Lösung hiervon ist der Ansatz<br />
y( t)<br />
= A ⋅ sin( ωt<br />
+ ϕ)<br />
. Einsetzen in die Differenzial-<br />
gleichung ergibt einen Zusammenhang zwischen m, D und ω :<br />
y(<br />
t)<br />
⇒<br />
F R<br />
2<br />
2<br />
= A ⋅ sin( ωt<br />
+ ϕ)<br />
⇒ " y"<br />
( t)<br />
= −A<br />
⋅ ω sin( ωt<br />
+ ϕ)<br />
⇒ m ⋅ ( −A<br />
⋅ ω sin( ωt<br />
+ ϕ))<br />
= −D<br />
⋅ A ⋅ sin( ωt<br />
+ ϕ)<br />
m 2<br />
⋅ ω<br />
= D ⇔<br />
ω =<br />
D<br />
m<br />
⇒ f =<br />
1<br />
2π<br />
⋅<br />
D<br />
m<br />
⇒ T = 2π<br />
⋅<br />
Insbesondere: Frequenz f und Schwingungsdauer T sind unabhängig von der Amplitude (Experiment!).<br />
Anmerkungen:<br />
1. Im folgenden wird s ( t)<br />
: = y(<br />
t)<br />
gesetzt.<br />
2. Obiges Ergebnis erhält man immer, wenn FR = −D<br />
⋅ s ist. D heißt die Richtgröße des schwingenden<br />
Systems. Es gilt damit: harmonische Schwingung ⇔ FR ~ −s<br />
⇔ f unabhängig von Amplitude A.<br />
3. Die Federmasse muss gegenüber m vernachlässigbar sein, da auch ein Teil der Federmasse<br />
mitschwingt.<br />
4. Ein schwingungsfähiges System heißt Oszillator.<br />
m<br />
D<br />
0<br />
y<br />
Feder (D)<br />
Masse m
Aufgaben:<br />
S. 118/1<br />
Blatt Nr. 5<br />
Hausaufgabe Blatt Nr. 6.1<br />
2.2.2 Fadenpendel<br />
An einem Faden vernachlässigbarer Masse der Länge l hängt ein Körper der Masse m. Nach Auslenkung<br />
führt er eine Schwingung auf einem Kreisbogenstück mit Radius l durch.<br />
Rücktreibende Kraft FR ist die Gewichtskomponente in Richtung Ruhelage. Die<br />
dazu senkrechte Komponente spannt den Faden.<br />
x<br />
Es gilt: FR = −FG<br />
⋅ sin α = −mg<br />
⋅ sin (Bogenmaß von α )!<br />
l<br />
Das heißt aber: keine harmonische Schwingung!<br />
✍<br />
x x<br />
Für kleine Winkel α , d.h. x
3 kg<br />
2<br />
0,<br />
5kg<br />
⋅ m ⋅ s<br />
Wasser: ρ = 1,<br />
0 ⋅10<br />
; Q = 1,<br />
0cm<br />
; M = 0,<br />
5kg<br />
⇒ T = 2π<br />
⋅<br />
= 3,<br />
14s<br />
3<br />
3 −4<br />
2<br />
m<br />
2 ⋅10<br />
kg ⋅10<br />
m ⋅ 9,<br />
81m<br />
Hausaufgabe: T für Quecksilber<br />
Ergänzung: Ist l die Länge des U-Rohrs, so folgt M = ρ ⋅ Vges<br />
= ρ ⋅ Q ⋅ l<br />
ρ ⋅ Q ⋅ l l<br />
⇒ T = 2π<br />
⋅ = 2π<br />
⋅ (vgl. mit Fadenpendel!)<br />
2ρ<br />
⋅ Q ⋅ g 2g<br />
2.2.4 Kettenpendel<br />
Rücktreibende Kraft ist die Gewichtskraft des überstehenden Kettenstücks:<br />
FR=−m'⋅2y⋅ g<br />
Wenn die Massenbelegung m’ konstant ist, so gilt<br />
FR∼y⇒Schwingung ist harmonisch mit D: = 2m'⋅ g.<br />
Die gesamte schwingende Masse beträgt M = m'⋅ l<br />
D 2m'⋅g 2g<br />
⇒ω= = =<br />
M m'⋅l l<br />
2<br />
l 1,5m⋅s Hausaufgabe: Übungsblatt Nr. 1: T = 2π⋅ = 2π⋅ = 1,74s<br />
2g 2 ⋅ 9,81m<br />
2.2.5 Schwimmender Körper<br />
Ein in Wasser der Dichte fl ρ stabil schwimmender Holzkörper (Grundfläche Q, Höhe h, Dichte ρ K ) führt<br />
nach einmaligem senkrechten<br />
Eintauchen eine Schwingung aus.<br />
Auf den Körper wirken seine<br />
Gewichtskraft F G<br />
$$% und die (von der<br />
Eintauchtiefe abhängige)<br />
Auftriebskraft F A;0<br />
$$$% y<br />
.<br />
In der Ruhelage erfährt der Körper keine Kraft. Es muss hier gelten: FG = FA;0<br />
(*)<br />
Wird nun der Körper um die Strecke y aus seiner Ruhelage ausgelenkt, so erfährt er eine um den Betrag<br />
∆ FA<br />
veränderte Auftriebskraft (beim Eintauchen vermehrt, beim Anheben vermindert):<br />
∆ FA = ∆mfl ⋅ g =ρfl ⋅∆Vk ⋅ g =ρfl ⋅Q⋅ y ⋅ g<br />
Mit Berücksichtigung von Vorzeichen:<br />
Eintauchen:<br />
(*)<br />
F = F − F = F − (F +∆ F ) = F −F −∆ F =−∆F ⇒ F = −ρ⋅Q⋅g⋅ y (y > 0)<br />
R G A G A;0 A G A;0 A A R fl<br />
Abheben:<br />
(*)<br />
F = F − F = F −(F −∆ F ) = F − F +∆ F =∆F ⇒ F =ρ⋅Q⋅g ⋅( − y) (y < 0)<br />
R G A G A;0 A G A;0 A A R fl<br />
In beiden Fällen gilt also FR=−D⋅ y mit D = ρfl ⋅Q⋅ g.<br />
Daher ist die Schwingung harmonisch, wenn<br />
ρ fl , Q und g konstant sind.<br />
Gesamte schwingende Masse: M = ρk ⋅ Vk =ρk ⋅Q⋅ h<br />
ω=<br />
D<br />
=<br />
M<br />
ρfl ⋅Q⋅g =<br />
ρ ⋅Q⋅h ρfl ⋅ g<br />
⇒ T = 2π⋅<br />
ρ ⋅ h<br />
ρk ⋅ h<br />
(Übungsblatt 10)<br />
ρ ⋅ g<br />
k k fl<br />
- 9 -<br />
h<br />
3<br />
2<br />
0
2.3 Energie bei Schwingungsvorgängen<br />
Während einer mechanischen Schwingung ändern sich ständig kinetische und potentielle Energie des<br />
schwingenden Körpers. Im folgenden sollen kinetische Energie k E (t) und potentielle Energie E(t) p bei<br />
einer harmonischen Schwingung berechnet werden:<br />
m 2 m 2 2 2<br />
Kinetische Energie: E(t) k = ⋅ (v(t)) = ⋅A⋅ω ⋅cos( ω t +ϕ )<br />
2 2<br />
D 2 D<br />
2<br />
Potentielle Energie: E(t) p = ⋅ (s(t)) = ⋅Asin( ⋅ ω t +ϕ )<br />
2 2<br />
Gesamte Schwingungsenergie:<br />
m 2 m 2 2 2 D<br />
2<br />
E(t) = E k(t) + E p(t)<br />
= ⋅ (v(t)) = ⋅A⋅ω ⋅cos ( ω t +ϕ ) + ⋅A⋅sin ( ω t +ϕ )<br />
2 2 2<br />
2<br />
mit D =ω ⋅ m ergibt sich:<br />
m 2 m 2 2 2 m 2 2<br />
E(t) = ⋅ (v(t)) = ⋅A⋅ω ⋅cos ( ω t +ϕ ) + ⋅ω ⋅A⋅sin ( ω t +ϕ ) =<br />
2 2 2<br />
m 2 2 2 2 m 2 2 2 2<br />
= ⋅A ⋅ω ⋅(cos ( ω t +ϕ ) + sin ( ω t +ϕ )) = ⋅A ⋅ω , denn cos ( ω t +ϕ ) + sin ( ω t +ϕ ) = 1<br />
2 2<br />
Damit ist E zeitlich konstant, wenn A konstant bleibt (keine Dämpfung)<br />
Graphische Darstellung:<br />
Ek(t), Ep(t), E(t)<br />
Aufgabe: S. 119/1<br />
Hausaufgaben: S.119/2d,e<br />
Übungsblatt 6,9<br />
2.4 Gedämpfte <strong>Schwingungen</strong><br />
Aufgrund unvermeidlicher Reibung nimmt die Energie einer harmonischen Schwingung allmählich ab.<br />
Man unterscheidet zweierlei Arten von Dämpfung:<br />
Einfluß konstanter Reibungskraft<br />
(z.B. waagrechte Schwingung eines Holzblocks auf rauher Oberfläche)<br />
Die Amplituden der Schwingung nehmen um jeweils festen Betrag ab (abnehmende arithmetische Folge).<br />
Schließlich ist in der Nähe der Nullage die rücktreibende Kraft nicht mehr größer als die Reibungskraft.<br />
Der Stillstand erfolgt daher (i.a.) außerhalb der Nullage.<br />
Einfluß geschwindigkeitsabhängiger Reibungskraft<br />
(z.B. Luftreibung, innere Reibung, Wirbelstromdämpfung)<br />
T<br />
- 10 -<br />
t
Die Amplituden bilden eine fallende geometrische Folge. Gilt für die Reibungskraft FReib =−k⋅ v mit<br />
k<br />
konstantem k (d.h. geschwindigkeitsproportional), so heißt δ= : (m Masse) Abklingkonstante. In<br />
2m<br />
Abhängigkeit von δ ergeben sich folgende Fälle:<br />
0<br />
Auslenkung y(t)<br />
Zeit t<br />
0<br />
Auslenkung y(t)<br />
- 11 -<br />
Zeit t<br />
0<br />
Auslenkung y(t)<br />
periodisch Aperiodischer Grenzfall Kriechfall (aperiodisch)<br />
2.5 Erzwungene <strong>Schwingungen</strong><br />
Ein Federpendel ist über einen Exzenter mit einem Elektromotor, der4 sich mit konstanter<br />
Winkelgeschwindigkeit dreht, verbunden. Er bewegt die Feder mit der Erregerfrequenz f periodisch auf<br />
und ab. Dadurch wird das Federpendel zu einer harmonischen Schwingung mit dieser Frequenz f<br />
gezwungen. Über den Abstand zu 2 Magneten, zwischen denen sich der Pendelkörper bewegt, kann die<br />
Dämpfung, ausgedrückt durch δ (vgl. 2.4) variiert werden.<br />
Beobachtung: Die Amplitude A der erzwungenen Schwingung hängt stark ab von der Erregerfrequenz f.<br />
I) geringe Dämpfung<br />
f in Hz<br />
A in mm<br />
II) starke Dämpfung<br />
f in Hz<br />
A in mm<br />
Grafische Darstellung:<br />
Amplitude A der erzwungenen Schwingung<br />
Die Erregerfrequenz, bei der das Maximum<br />
kleine Dämpfung<br />
der Amplitude liegt, heißt Resonanzfrequenz<br />
fR. fR und die erzwungene Amplitude A(fR)<br />
hängen ab von der Dämpfung, gegeben durch<br />
große Dämpfung<br />
die Abklingkonstante δ ( ~ v , vgl. 2.4). Ohne<br />
Aerr<br />
Erregerfrequenz Dämpfung, d.h. δ= 0 , wird A(fR) unendlich<br />
0<br />
Resonanzfrequenz<br />
groß („Resonanzkatastrophe“). fR stimmt dann<br />
überein mit der Eigenfrequenz f0, mit der das<br />
Pendel frei schwingt. All dies ergibt sich auch<br />
aus der mathematischen Behandlung ( ω= 2πf; ω R = 2πf R; ω 0 = 2π f0<br />
):<br />
Zeit t
A( ω ) =<br />
Man erkennt:<br />
1. fR < f0<br />
2. limA(f ) = 0<br />
f →∞<br />
3. lim A(f ) = Aerr<br />
f→0 2<br />
Aerr<br />
⋅ω0<br />
2 2 2 2 2<br />
0<br />
( ω −ω ) + 4⋅δ<br />
⋅ω<br />
mit relativem Maximum<br />
- 12 -<br />
2 2<br />
ω R = ω0 −2δ .<br />
Der Betrag der Phasendifferenz zwischen Erregerschwingung und erzwungener Schwingung:<br />
2 ⋅ω⋅δ<br />
Mathematisch: tan ∆ϕ = 2 2<br />
ω −ω<br />
0<br />
Grafisch (negative Phasendifferenz, da Nachhinken)<br />
Man erkennt:<br />
1. Für kleine Erregerfrequenzen f verlaufen Erregerschwingung und erzwungene Schwingung<br />
lim ∆ϕ = 0<br />
gleichphasig:<br />
f→0 2. Für große Erregerfrequenzen f verlaufen Erregerschwingung und erzwungene Schwingung<br />
gegenphasig: lim ∆ϕ =−π<br />
f →∞<br />
π<br />
3. Für die Eigenfrequenz f0 gilt unabhängig von der Dämpfung: ∆ϕ =− .<br />
2<br />
Resonanzversuche<br />
Aufgaben:<br />
S.124/1 oben<br />
S. 124/1 unten