Drehung - imng
Drehung - imng
Drehung - imng

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
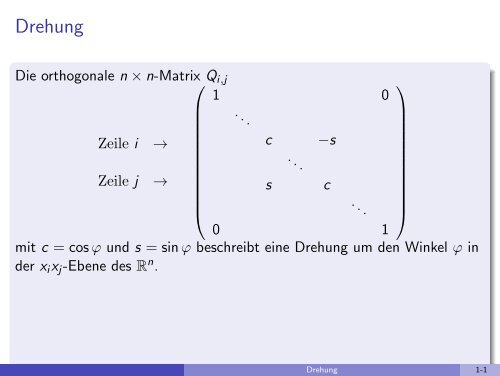
<strong>Drehung</strong><br />
Die orthogonale n × n-Matrix<br />
⎛<br />
Q i,j<br />
⎞<br />
1 0<br />
. .. Zeile i →<br />
c −s<br />
. ..<br />
Zeile j →<br />
s c<br />
⎜<br />
.<br />
⎝<br />
..<br />
⎟<br />
⎠<br />
0 1<br />
mit c = cos ϕ und s = sin ϕ beschreibt eine <strong>Drehung</strong> um den Winkel ϕ in<br />
der x i x j -Ebene des R n .<br />
<strong>Drehung</strong> 1-1
<strong>Drehung</strong><br />
Die orthogonale n × n-Matrix<br />
⎛<br />
Q i,j<br />
⎞<br />
1 0<br />
. .. Zeile i →<br />
c −s<br />
. ..<br />
Zeile j →<br />
s c<br />
⎜<br />
.<br />
⎝<br />
..<br />
⎟<br />
⎠<br />
0 1<br />
mit c = cos ϕ und s = sin ϕ beschreibt eine <strong>Drehung</strong> um den Winkel ϕ in<br />
der x i x j -Ebene des R n .<br />
Jede orthogonale Matrix Q mit det Q = 1 ist als Produkt von <strong>Drehung</strong>en<br />
in Koordinatenebenen darstellbar:<br />
Q = ∏ i
Beweis:<br />
cos 2 ϕ + sin 2 ϕ = 1 =⇒<br />
<strong>Drehung</strong> 2-1
Beweis:<br />
cos 2 ϕ + sin 2 ϕ = 1 =⇒<br />
⎛<br />
1 0<br />
. .. c 2 + s 2 −sc + sc<br />
RR t =<br />
. ..<br />
−sc + sc c 2 + s 2<br />
⎜<br />
.<br />
⎝<br />
..<br />
0 1<br />
⎞<br />
⎟<br />
⎠<br />
<strong>Drehung</strong> 2-2
Beweis:<br />
cos 2 ϕ + sin 2 ϕ = 1 =⇒<br />
⎛<br />
1 0<br />
. .. c 2 + s 2 −sc + sc<br />
RR t =<br />
. ..<br />
−sc + sc c 2 + s 2<br />
⎜<br />
.<br />
⎝<br />
..<br />
0 1<br />
⎞<br />
⎟<br />
⎠<br />
= E<br />
<strong>Drehung</strong> 2-3
Beweis:<br />
cos 2 ϕ + sin 2 ϕ = 1 =⇒<br />
⎛<br />
1 0<br />
. .. c 2 + s 2 −sc + sc<br />
RR t =<br />
. ..<br />
−sc + sc c 2 + s 2<br />
⎜<br />
.<br />
⎝<br />
..<br />
0 1<br />
⎞<br />
⎟<br />
⎠<br />
= E<br />
Orthogonalität der Drehmatrix R<br />
<strong>Drehung</strong> 2-4
Herleitung der Faktorisierung für n = 3:<br />
Bestimmung der <strong>Drehung</strong>en durch sukzessives Annulieren der Elemente<br />
q 21 , q 31 , q 32 von Q:<br />
<strong>Drehung</strong> 2-5
Herleitung der Faktorisierung für n = 3:<br />
Bestimmung der <strong>Drehung</strong>en durch sukzessives Annulieren der Elemente<br />
q 21 , q 31 , q 32 von Q:<br />
Q1,2 −1 = ⎝<br />
⎛<br />
⋆ ⋆ ⋆<br />
0 ⋆ ⋆<br />
⋆ ⋆ ⋆<br />
⎞<br />
⎠<br />
<strong>Drehung</strong> 2-6
Herleitung der Faktorisierung für n = 3:<br />
Bestimmung der <strong>Drehung</strong>en durch sukzessives Annulieren der Elemente<br />
q 21 , q 31 , q 32 von Q:<br />
Q1,2 −1 = ⎝<br />
⎛<br />
Q1,3 −1 1,2 Q = ⎝<br />
⎛<br />
⋆ ⋆ ⋆<br />
0 ⋆ ⋆<br />
⋆ ⋆ ⋆<br />
1 ⋆ ⋆<br />
0 ⋆ ⋆<br />
0 ⋆ ⋆<br />
⎞<br />
⎠<br />
⎞<br />
⎠<br />
<strong>Drehung</strong> 2-7
Herleitung der Faktorisierung für n = 3:<br />
Bestimmung der <strong>Drehung</strong>en durch sukzessives Annulieren der Elemente<br />
q 21 , q 31 , q 32 von Q:<br />
Q1,2 −1 = ⎝<br />
⎛<br />
Q1,3 −1 1,2 Q = ⎝<br />
⎛<br />
Q2,3 −1 1,3 Q−1 1,2 Q = ⎝<br />
⎛<br />
⋆ ⋆ ⋆<br />
0 ⋆ ⋆<br />
⋆ ⋆ ⋆<br />
1 ⋆ ⋆<br />
0 ⋆ ⋆<br />
0 ⋆ ⋆<br />
1 ⋆ ⋆<br />
0 1 ⋆<br />
0 0 ⋆<br />
⎞<br />
⎠<br />
⎞<br />
⎠<br />
⎞<br />
⎠<br />
<strong>Drehung</strong> 2-8
Herleitung der Faktorisierung für n = 3:<br />
Bestimmung der <strong>Drehung</strong>en durch sukzessives Annulieren der Elemente<br />
q 21 , q 31 , q 32 von Q:<br />
Q1,2 −1 = ⎝<br />
⎛<br />
Q1,3 −1 1,2 Q = ⎝<br />
⎛<br />
Q2,3 −1 1,3 Q−1 1,2 Q = ⎝<br />
⎛<br />
⋆ ⋆ ⋆<br />
0 ⋆ ⋆<br />
⋆ ⋆ ⋆<br />
1 ⋆ ⋆<br />
0 ⋆ ⋆<br />
0 ⋆ ⋆<br />
1 ⋆ ⋆<br />
0 1 ⋆<br />
0 0 ⋆<br />
⎞<br />
⎠<br />
⎞<br />
⎠<br />
⎞<br />
⎠ = R<br />
Q 2,3 , Q 1,3 , Q 1,2 bilden jeweils Vektoren (v 1 , v 2 ) t auf Vielfache von<br />
Einheitsvektoren ab.<br />
<strong>Drehung</strong> 2-9
Herleitung der Faktorisierung für n = 3:<br />
Bestimmung der <strong>Drehung</strong>en durch sukzessives Annulieren der Elemente<br />
q 21 , q 31 , q 32 von Q:<br />
Q1,2 −1 = ⎝<br />
⎛<br />
Q1,3 −1 1,2 Q = ⎝<br />
⎛<br />
Q2,3 −1 1,3 Q−1 1,2 Q = ⎝<br />
⎛<br />
⋆ ⋆ ⋆<br />
0 ⋆ ⋆<br />
⋆ ⋆ ⋆<br />
1 ⋆ ⋆<br />
0 ⋆ ⋆<br />
0 ⋆ ⋆<br />
1 ⋆ ⋆<br />
0 1 ⋆<br />
0 0 ⋆<br />
⎞<br />
⎠<br />
⎞<br />
⎠<br />
⎞<br />
⎠ = R<br />
Q 2,3 , Q 1,3 , Q 1,2 bilden jeweils Vektoren (v 1 , v 2 ) t auf Vielfache von<br />
Einheitsvektoren ab.<br />
det R = 1 =⇒ r 33 = 1<br />
Normierung der Spalten =⇒ R = E<br />
<strong>Drehung</strong> 2-10
Beispiel:<br />
Faktorisierung der Drehmatrix<br />
⎛<br />
Q =<br />
⎜<br />
⎝<br />
√<br />
1<br />
0<br />
2<br />
− 3<br />
2<br />
− √ 1<br />
√ √<br />
2<br />
− 6<br />
4<br />
− 4<br />
8<br />
− 1 √<br />
2<br />
√<br />
6<br />
4<br />
√<br />
6<br />
8<br />
⎞<br />
⎟<br />
⎠<br />
<strong>Drehung</strong> 3-1
Beispiel:<br />
Faktorisierung der Drehmatrix<br />
⎛<br />
Q =<br />
⎜<br />
⎝<br />
√<br />
1<br />
0<br />
2<br />
− 3<br />
2<br />
− √ 1<br />
√ √<br />
2<br />
− 6<br />
4<br />
− 4<br />
8<br />
− 1 √<br />
2<br />
√<br />
6<br />
4<br />
√<br />
6<br />
8<br />
⎞<br />
⎟<br />
⎠<br />
<strong>Drehung</strong> D −1<br />
z<br />
= Q −1<br />
1,2 um π 2<br />
⎛<br />
⎝<br />
0 −1 0<br />
1 0 0<br />
0 0 1<br />
um die z-Achse:<br />
⎞<br />
⎠ Q =<br />
⎛<br />
⎜<br />
⎝<br />
√<br />
√1<br />
6<br />
2 4<br />
1<br />
0<br />
− √ 1<br />
√<br />
6<br />
2 4<br />
√<br />
6<br />
8<br />
√<br />
2<br />
− 3<br />
√2<br />
6<br />
8<br />
⎞<br />
⎟<br />
⎠<br />
<strong>Drehung</strong> 3-2
<strong>Drehung</strong> Dy<br />
−1 = Q1,3 −1 um π 4<br />
⎛<br />
⎜<br />
⎝<br />
√1<br />
2<br />
0 − √ 1<br />
2<br />
0 1 0<br />
1 √<br />
2<br />
0<br />
1 √2<br />
um die y-Achse:<br />
⎞<br />
⎟<br />
⎠ D −1<br />
z Q =<br />
⎛<br />
⎜<br />
⎝<br />
1 0 0<br />
√<br />
1<br />
0<br />
2<br />
− 3<br />
√ 2<br />
0 3 1<br />
2 2<br />
⎞<br />
⎟<br />
⎠<br />
<strong>Drehung</strong> 3-3
<strong>Drehung</strong> Dy<br />
−1 = Q1,3 −1 um π 4<br />
⎛<br />
⎜<br />
⎝<br />
√1<br />
2<br />
0 − √ 1<br />
2<br />
0 1 0<br />
1 √<br />
2<br />
0<br />
1 √2<br />
um die y-Achse:<br />
⎞<br />
⎟<br />
⎠ D −1<br />
z Q =<br />
⎛<br />
⎜<br />
⎝<br />
1 0 0<br />
√<br />
1<br />
0<br />
2<br />
− 3<br />
√ 2<br />
0 3 1<br />
2 2<br />
⎞<br />
⎟<br />
⎠<br />
<strong>Drehung</strong> D x = Q 2,3 um π 3 die x-Achse <strong>Drehung</strong> 3-4
<strong>Drehung</strong> Dy<br />
−1 = Q1,3 −1 um π 4<br />
⎛<br />
⎜<br />
⎝<br />
√1<br />
2<br />
0 − √ 1<br />
2<br />
0 1 0<br />
1 √<br />
2<br />
0<br />
1 √2<br />
um die y-Achse:<br />
⎞<br />
⎟<br />
⎠ D −1<br />
z Q =<br />
⎛<br />
⎜<br />
⎝<br />
1 0 0<br />
√<br />
1<br />
0<br />
2<br />
− 3<br />
√ 2<br />
0 3 1<br />
2 2<br />
⎞<br />
⎟<br />
⎠<br />
<strong>Drehung</strong> D x = Q 2,3 um π 3<br />
die x-Achse<br />
Insgesamt folgt<br />
⎛<br />
⎞ ⎛<br />
0 1 0<br />
Q = ⎝ −1 0 0 ⎠ ⎜<br />
⎝<br />
0 0 1<br />
√1<br />
1<br />
2<br />
0 √2<br />
0 1 0<br />
− √ 1<br />
2<br />
0 √2 1<br />
⎞<br />
⎟<br />
⎠<br />
⎛<br />
⎜<br />
⎝<br />
1 0 0<br />
√<br />
1<br />
0<br />
2<br />
− 3<br />
√ 2<br />
0 3 1<br />
2 2<br />
D z D y D x<br />
⎞<br />
⎟<br />
⎠<br />
<strong>Drehung</strong> 3-5
<strong>Drehung</strong> im Raum<br />
Eine <strong>Drehung</strong> im R 3 mit normierter Drehachsenrichtung u und Drehwinkel<br />
ϕ, orientiert wie eine Rechtsschraube, bildet einen Vektor x auf<br />
Qx = cos ϕ x + (1 − cos ϕ)uu t x + sin ϕ u × x<br />
ab, wobei u × x das Kreuzprodukt von u und x bezeichnet.<br />
<strong>Drehung</strong> 4-1
<strong>Drehung</strong> im Raum<br />
Eine <strong>Drehung</strong> im R 3 mit normierter Drehachsenrichtung u und Drehwinkel<br />
ϕ, orientiert wie eine Rechtsschraube, bildet einen Vektor x auf<br />
Qx = cos ϕ x + (1 − cos ϕ)uu t x + sin ϕ u × x<br />
ab, wobei u × x das Kreuzprodukt von u und x bezeichnet.<br />
Die entsprechende Drehmatrix ist<br />
Q : q ik = cos ϕ δ ik + (1 − cos ϕ) u i u k + sin ϕ ∑ j<br />
ε ijk u j ,<br />
mit dem Kroneckersymbol δ ik und dem ε-Tensor ε ijk .<br />
<strong>Drehung</strong> 4-2
Beweis:<br />
zeige:<br />
Qu = u und Q dreht einen zu u orthogonaler Vektor v um einen Winkel ϕ<br />
um die Achse u.<br />
<strong>Drehung</strong> 5-1
Beweis:<br />
zeige:<br />
Qu = u und Q dreht einen zu u orthogonaler Vektor v um einen Winkel ϕ<br />
um die Achse u.<br />
(i) Bild von u:<br />
Qu = cos ϕ u + (1 − cos ϕ)u }{{} u t u + sin ϕ<br />
}<br />
u<br />
{{<br />
× u<br />
}<br />
= u<br />
=1<br />
=0<br />
<strong>Drehung</strong> 5-2
Beweis:<br />
zeige:<br />
Qu = u und Q dreht einen zu u orthogonaler Vektor v um einen Winkel ϕ<br />
um die Achse u.<br />
(i) Bild von u:<br />
(ii) Bild von v:<br />
Qu = cos ϕ u + (1 − cos ϕ)u }{{} u t u + sin ϕ<br />
}<br />
u<br />
{{<br />
× u<br />
}<br />
= u<br />
=1<br />
=0<br />
Qv = cos ϕ v + sin ϕ u × v<br />
⇔ <strong>Drehung</strong> um ϕ in der von v und u × v aufgespannten Ebene<br />
<strong>Drehung</strong> 5-3
Beispiel:<br />
Matrix Q einer <strong>Drehung</strong> um ϕ = π 3<br />
um die Achse u =<br />
1 √<br />
3<br />
(1 1 1) t :<br />
<strong>Drehung</strong> 6-1
Beispiel:<br />
Matrix Q einer <strong>Drehung</strong> um ϕ = π 3<br />
cos ϕ δ ik :<br />
um die Achse u =<br />
1 √<br />
3<br />
(1 1 1) t :<br />
⎛<br />
⎝<br />
1<br />
2<br />
0 0<br />
1<br />
0<br />
2<br />
0<br />
0 0<br />
1<br />
2<br />
⎞<br />
⎠<br />
<strong>Drehung</strong> 6-2
Beispiel:<br />
Matrix Q einer <strong>Drehung</strong> um ϕ = π 3<br />
cos ϕ δ ik :<br />
(1 − cos ϕ)u i u k :<br />
um die Achse u =<br />
1 √<br />
3<br />
(1 1 1) t :<br />
⎛ ⎞<br />
1<br />
2<br />
0 0<br />
⎝ 1<br />
0<br />
2<br />
0 ⎠<br />
1<br />
0 0<br />
2<br />
⎛ ⎞<br />
1 1 1<br />
1<br />
⎝ 1 1 1 ⎠<br />
6<br />
1 1 1<br />
<strong>Drehung</strong> 6-3
Beispiel:<br />
Matrix Q einer <strong>Drehung</strong> um ϕ = π 3<br />
cos ϕ δ ik :<br />
(1 − cos ϕ)u i u k :<br />
sin ϕ ∑ ε ijk u j<br />
j<br />
:<br />
um die Achse u =<br />
1 √<br />
3<br />
(1 1 1) t :<br />
⎛ ⎞<br />
1<br />
2<br />
0 0<br />
⎝ 1<br />
0<br />
2<br />
0 ⎠<br />
1<br />
0 0<br />
2<br />
⎛ ⎞<br />
1 1 1<br />
1<br />
⎝ 1 1 1 ⎠<br />
6<br />
1 1 1<br />
1<br />
2<br />
⎛<br />
⎝<br />
0 −1 1<br />
1 0 −1<br />
−1 1 0<br />
⎞<br />
⎠<br />
<strong>Drehung</strong> 6-4
Beispiel:<br />
Matrix Q einer <strong>Drehung</strong> um ϕ = π 3<br />
=⇒<br />
cos ϕ δ ik :<br />
(1 − cos ϕ)u i u k :<br />
sin ϕ ∑ j<br />
ε ijk u j :<br />
⎛<br />
Q = 1 ⎝<br />
3<br />
um die Achse u =<br />
1 √<br />
3<br />
(1 1 1) t :<br />
⎛ ⎞<br />
1<br />
2<br />
0 0<br />
⎝ 1<br />
0<br />
2<br />
0 ⎠<br />
1<br />
0 0<br />
2<br />
⎛ ⎞<br />
1 1 1<br />
1<br />
⎝ 1 1 1 ⎠<br />
6<br />
1 1 1<br />
1<br />
2<br />
⎛<br />
⎝<br />
2 −1 2<br />
2 2 −1<br />
−1 2 2<br />
0 −1 1<br />
1 0 −1<br />
−1 1 0<br />
⎞<br />
⎠<br />
⎞<br />
⎠<br />
<strong>Drehung</strong> 6-5