Rotation eines kartesischen Koordinatensystems - imng
Rotation eines kartesischen Koordinatensystems - imng
Rotation eines kartesischen Koordinatensystems - imng

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
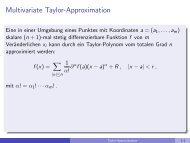
<strong>Rotation</strong> <strong>eines</strong> <strong>kartesischen</strong> <strong>Koordinatensystems</strong><br />
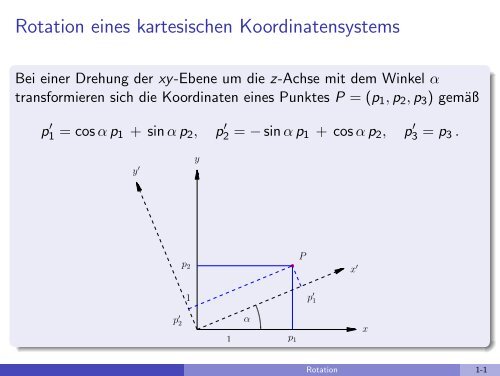
Bei einer Drehung der xy-Ebene um die z-Achse mit dem Winkel α<br />
transformieren sich die Koordinaten <strong>eines</strong> Punktes P = (p 1 , p 2 , p 3 ) gemäß<br />
p ′ 1 = cos α p 1 + sin α p 2 , p ′ 2 = − sin α p 1 + cos α p 2 , p ′ 3 = p 3 .<br />
y<br />
y ′ 1<br />
p 2<br />
P<br />
x ′<br />
1<br />
p ′ 1<br />
p ′ 2<br />
α<br />
p 1<br />
x<br />
<strong>Rotation</strong> 1-1
Analoge Formeln erhält man für Drehungen der yz- und zx-Ebene.<br />
<strong>Rotation</strong> 1-2
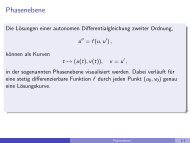
Beweis:<br />
y<br />
∢(S, P, Q) = α =⇒<br />
△(S, O, R) ∼ △(S, P, Q)<br />
p 2<br />
S<br />
P<br />
Q<br />
x ′<br />
p ′ 1<br />
y ′ p 1<br />
p ′ 2<br />
O<br />
α<br />
R<br />
x<br />
<strong>Rotation</strong> 2-1
Beweis:<br />
y<br />
∢(S, P, Q) = α =⇒<br />
△(S, O, R) ∼ △(S, P, Q)<br />
p 2<br />
S<br />
P<br />
Q<br />
x ′<br />
p ′ 1<br />
erstes Dreieck:<br />
|OS| = p 1 / cos α,<br />
y ′ p 1<br />
p ′ 2<br />
O<br />
|RS| = p 1 tan α<br />
α<br />
R<br />
x<br />
<strong>Rotation</strong> 2-2
Beweis:<br />
y<br />
∢(S, P, Q) = α =⇒<br />
△(S, O, R) ∼ △(S, P, Q)<br />
p 2<br />
S<br />
P<br />
Q<br />
x ′<br />
p ′ 1<br />
erstes Dreieck:<br />
zweites Dreieck:<br />
|OS| = p 1 / cos α,<br />
y ′ p 1<br />
p ′ 2<br />
O<br />
|RS| = p 1 tan α<br />
α<br />
R<br />
x<br />
p 2 ′ = cos α |PS| = cos α (p 2 − |RS|) = cos α p 2 − sin α p 1<br />
p 1 ′ = |OS| + |SQ| = p 1 / cos α + sin α (p 2 − |RS|)<br />
= 1 − sin2 α<br />
cos α p 1 + sin α p 2 = cos α p 1 + sin α p 2<br />
<strong>Rotation</strong> 2-3
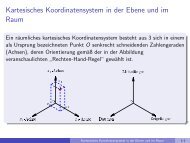
Beispiel:<br />
Bahnkurven von geradlinigen und kreisförmigen Bewegungen (links)<br />
G : (x, y) = (1, 2 + t/(2π)),<br />
K : (x, y) = (1 + cos(t), 2 − sin(t))<br />
beobachtet in einem mit Winkelgeschwindigkeit ω = 1 rotierenden<br />
ÖÖÔÐÑÒØ× Ý Ý¼<br />
Bezugssystem (rechts)<br />
¾<br />
½Ø Ü ¾<br />
½ ܼ<br />
<strong>Rotation</strong> 3-1
Transformation<br />
x ′ = cx + sy,<br />
mit c = cos(ωt), s = sin(ωt)<br />
y ′ = −sx + cy<br />
<strong>Rotation</strong> 3-2
Transformation<br />
x ′ = cx + sy,<br />
mit c = cos(ωt), s = sin(ωt)<br />
geradlinige Bewegung Spirale:<br />
x ′ = c + s(2 + t/(2π)),<br />
y ′ = −sx + cy<br />
y ′ = −s + c(2 + t/(2π))<br />
<strong>Rotation</strong> 3-3
Transformation<br />
x ′ = cx + sy,<br />
mit c = cos(ωt), s = sin(ωt)<br />
geradlinige Bewegung Spirale:<br />
x ′ = c + s(2 + t/(2π)),<br />
y ′ = −sx + cy<br />
y ′ = −s + c(2 + t/(2π))<br />
kreisförmige Bewegung:<br />
x ′ = c(1 + ˜c) + s(2 − ˜s),<br />
y ′ = −s(1 + ˜c) + c(2 − ˜s)<br />
(˜c = cos t, ˜s = sin t)<br />
<strong>Rotation</strong> 3-4
Transformation<br />
x ′ = cx + sy,<br />
mit c = cos(ωt), s = sin(ωt)<br />
geradlinige Bewegung Spirale:<br />
x ′ = c + s(2 + t/(2π)),<br />
y ′ = −sx + cy<br />
y ′ = −s + c(2 + t/(2π))<br />
kreisförmige Bewegung:<br />
x ′ = c(1 + ˜c) + s(2 − ˜s),<br />
y ′ = −s(1 + ˜c) + c(2 − ˜s)<br />
(˜c = cos t, ˜s = sin t)<br />
abrupte Richtungsänderung möglich<br />
<strong>Rotation</strong> 3-5