

Transformation kartesischer Koordinaten K K - Fakultät Informatik ...
Transformation kartesischer Koordinaten K K - Fakultät Informatik ...
Transformation kartesischer Koordinaten K K - Fakultät Informatik ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
♣ ♣♣♣♣♣♣♣♣<br />
<br />
Richter, M.: Grundwissen Mathematik für Ingenieure, Ergänzungen 1<br />
<strong>Transformation</strong> <strong>kartesischer</strong> <strong>Koordinaten</strong><br />
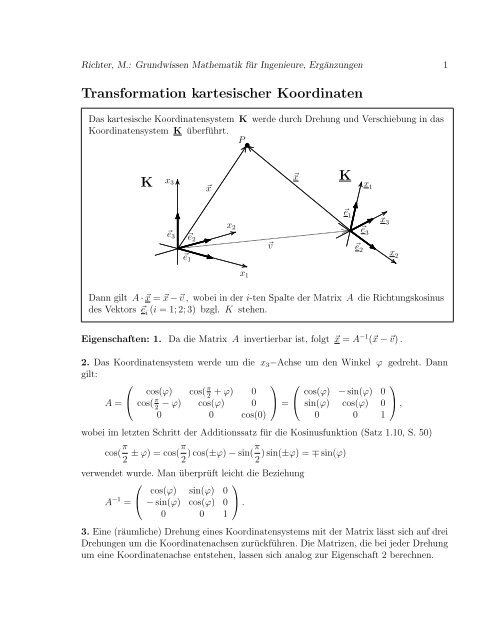
Das kartesische <strong>Koordinaten</strong>system K werde durch Drehung und Verschiebung in das<br />
<strong>Koordinaten</strong>system K überführt.<br />
P ✉<br />
♣<br />
♣♣<br />
♣♣<br />
K<br />
x 3 ♣ ♣<br />
⃗x<br />
x 1<br />
<br />
<br />
⃗e 1 ♣ ♣♣♣♣♣♣♣<br />
x<br />
x 3<br />
2<br />
⃗e ♣ ♣ ⃗e 3 3 ⃗e 2 <br />
♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣<br />
⃗v<br />
⃗e 2<br />
⃗e<br />
x 2<br />
1 <br />
♣<br />
♣♣♣♣ ♣<br />
♣♣♣♣♣♣♣♣<br />
x 1<br />
⃗x<br />
K<br />
♣ ♣<br />
Dann gilt A · ⃗x = ⃗x −⃗v , wobei in der i-ten Spalte der Matrix A die Richtungskosinus<br />
des Vektors ⃗e i (i = 1; 2; 3) bzgl. K stehen.<br />
Eigenschaften: 1. Da die Matrix A invertierbar ist, folgt ⃗x = A −1 (⃗x − ⃗v) .<br />
2. Das <strong>Koordinaten</strong>system werde um die x 3 −Achse um den Winkel ϕ gedreht. Dann<br />
gilt:<br />
⎛<br />
cos(ϕ) cos( π + ϕ) 0 ⎞ ⎛<br />
⎞<br />
cos(ϕ) − sin(ϕ) 0<br />
2<br />
A = ⎝ cos( π − ϕ) cos(ϕ) 0 ⎠ = ⎝ sin(ϕ) cos(ϕ) 0 ⎠ ,<br />
2<br />
0 0 cos(0)<br />
0 0 1<br />
wobei im letzten Schritt der Additionssatz für die Kosinusfunktion (Satz 1.10, S. 50)<br />
cos( π 2 ± ϕ) = cos(π 2 ) cos(±ϕ) − sin(π ) sin(±ϕ) = ∓ sin(ϕ)<br />
2<br />
verwendet wurde. Man überprüft leicht die Beziehung<br />
⎛<br />
cos(ϕ) sin(ϕ)<br />
⎞<br />
0<br />
A −1 = ⎝ − sin(ϕ) cos(ϕ) 0 ⎠ .<br />
0 0 1<br />
3. Eine (räumliche) Drehung eines <strong>Koordinaten</strong>systems mit der Matrix lässt sich auf drei<br />
Drehungen um die <strong>Koordinaten</strong>achsen zurückführen. Die Matrizen, die bei jeder Drehung<br />
um eine <strong>Koordinaten</strong>achse entstehen, lassen sich analog zur Eigenschaft 2 berechnen.
Richter, M.: Grundwissen Mathematik für Ingenieure, Ergänzungen 2<br />
( 5<br />
)<br />
Beispiel: Das kartesische <strong>Koordinaten</strong>system K im R 2 wird um den Vektor ⃗v =<br />
2<br />
1<br />
π<br />
verschoben und um den Winkel<br />
3 gedreht.<br />
(1) Wie lauten die <strong>Koordinaten</strong> des Punktes P = P (2; 3) aus K in dem transformierten<br />
<strong>Koordinaten</strong>system?<br />
(2) Stellen Sie die Funktion y = f(x), x ∈ D , die in K gegeben ist, in dem transformierten<br />
<strong>Koordinaten</strong>system dar.<br />
( 5<br />
) (<br />
Lösung: ⃗v =<br />
2 2<br />
, ⃗x = , ϕ = 1 3)<br />
π ♣ ♣<br />
3 .<br />
<br />
( (<br />
cos<br />
π<br />
) (<br />
3 cos π + ))<br />
( π 1<br />
√ )<br />
⃗e 2<br />
− 1 ⃗e<br />
3 2 2 2 3<br />
1<br />
<br />
♣<br />
A =<br />
cos ( )<br />
π<br />
6<br />
cos ( )<br />
π<br />
3<br />
=<br />
√<br />
1<br />
2 3<br />
1<br />
2<br />
x 2<br />
<br />
⃗e 2 ϕ<br />
♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣♣ ♣♣<br />
⃗e 1 x 1<br />
(<br />
(1) A ∣ (<br />
) 1<br />
√ ) (<br />
−<br />
2 ∣⃗x 1 2 3 −<br />
1<br />
1<br />
√ )<br />
− 1 2<br />
2 2 3 −<br />
1<br />
2<br />
− ⃗v = √ −→<br />
√<br />
1<br />
2 3<br />
1<br />
2<br />
0 2 2 + 1 2 2 3<br />
( √ )<br />
3 −<br />
1 ( )<br />
4 1, 482<br />
−→ ⃗x = √ ≈<br />
1 + 1 4 3 1, 433<br />
(( ) ) ( 1<br />
)<br />
1 ( )<br />
x<br />
(2) ⃗x = A −1 2 2√<br />
3 x −<br />
5<br />
− ⃗v =<br />
·<br />
2<br />
f(x)<br />
− 2√ 1 3<br />
1 f(x) − 1<br />
( √ 2<br />
x + 3f(x) −<br />
= 1 5<br />
− √ )<br />
3<br />
2<br />
2<br />
− √ √<br />
3x + f(x) + 5 , x ∈ D. (∗)<br />
2 3 − 1<br />
Mit (∗) wird in dem transformierten <strong>Koordinaten</strong>system eine (ebene) Kurve in Parameterdarstellung<br />
beschrieben, wobei x der Parameter ist. (Siehe Seiten 163ff.) ◭













