Aufgabenblatt A5 - Institut für Technische und Numerische Mechanik
Aufgabenblatt A5 - Institut für Technische und Numerische Mechanik
Aufgabenblatt A5 - Institut für Technische und Numerische Mechanik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Institut</strong> für <strong>Technische</strong> <strong>und</strong> Num. <strong>Mechanik</strong> <strong>Technische</strong> <strong>Mechanik</strong> III<br />
Prof. Dr.-Ing. P. Eberhard Jun.-Prof. Dr.-Ing. R. Seifried WS 2011/12 <strong>A5</strong>.1<br />
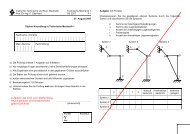
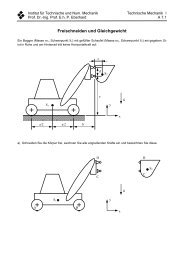
Untersuchung eines Industrieroboters<br />
Roboterarme werden in der industriellen Praxis für eine Vielzahl von<br />
Aufgaben eingesetzt. Gr<strong>und</strong>sätzlich sind 3 Achsen ausreichend um<br />
jeden Punkt im Arbeitsraum des Roboters erreichen zu können. Um<br />
die Orientierung des letzten Armglieds, das mit dem Werkzeug oder<br />
Greifer bestückt ist, beliebig steuern zu können, werden<br />
üblicherweise 3 zusätzliche Achsen am letzten Glied hinzugefügt.<br />
Der typische Industrieroboter besitzt also 6 Achsen.<br />
Im Folgenden wird die Bewegung eines vereinfachten Roboterarms mit 3 Achsen untersucht.<br />
Der Roboterarm wird mit Hilfe von 3<br />
Starrkörpern modelliert. Die Basis des<br />
Roboters bildet hierbei eine homogene<br />
z <br />
Kreisplatte (Radius r , Höhe h , Masse m 1<br />
).<br />
x<br />
Auf der Kreisplatte ist im Abstand r 1<br />
das<br />
erste Armglied (Länge l1<br />
, Masse m 2<br />
) an<br />
einem Drehgelenk befestigt. Das zweite<br />
z y<br />
z<br />
x<br />
Armglied (Länge l1<br />
, Masse m2<br />
) ist über ein<br />
weiteres Drehgelenk mit dem ersten Arm<br />
x<br />
verb<strong>und</strong>en. Beide Lagerungen erlauben eine<br />
Drehung um die y -Achsen der<br />
eingezeichneten lokalen Koordinatensysteme<br />
K <strong>und</strong> K . Die Verdrehung von K zu K ist hierbei durch den Winkel <br />
2<br />
, die von K<br />
zu K durch <br />
1<br />
gegeben. Die Basis ist drehbar um die z -Achse gelagert <strong>und</strong> das plattenfeste<br />
Koordinatensystem K um den Winkel zum Intertialsystem verdreht.<br />
An den Freiheitsgraden der Gelenke sind Elektromotoren angebracht, die die Momente<br />
z -Achse, M2<br />
um die y <strong>und</strong> M um die y -Achse aufbringen.<br />
<br />
3<br />
M 1<br />
um die<br />
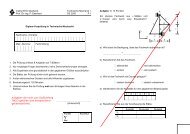
Freischnitt<br />
Die einzelnen Körper des Roboterarms wurden freigeschnitten. Zeichnen Sie in die<br />
Freischnittskizze auf der nächsten Seite die Kräfte <strong>und</strong> Momente ein. Die Schwerpunkte sind<br />
eingezeichnet <strong>und</strong> befinden sich im Mittelpunkt der Platte, bzw. auf halber Länge der Arme.
<strong>Institut</strong> für <strong>Technische</strong> <strong>und</strong> Num. <strong>Mechanik</strong> <strong>Technische</strong> <strong>Mechanik</strong> III<br />
Prof. Dr.-Ing. P. Eberhard Jun.-Prof. Dr.-Ing. R. Seifried WS 2011/12 <strong>A5</strong>.2<br />
Kinematik<br />
Geben Sie die Transformationsmatrizen C<br />
K K , C<br />
KK<br />
<strong>und</strong> C<br />
KK<br />
an.<br />
Berechen Sie die Drehmatrix C<br />
KK<br />
.<br />
Hinweis: cos( )cos(<br />
)<br />
sin( )sin(<br />
)<br />
cos( ),<br />
cos( )sin(<br />
)<br />
cos( )sin(<br />
)<br />
sin( ).<br />
Wie lauten die Matrizen C<br />
KK<br />
, C<br />
KK<br />
?<br />
Geben Sie den Ortsvektor rOL 1 , K<br />
zum Drehlager des Arms 1 an. Bestimmen Sie dann die<br />
Ortsvektoren rOS 1 , K<br />
zum Schwerpunkt des Arms 1 <strong>und</strong> rOS 2 , K<br />
zum Schwerpunkt des Arms 2.<br />
Wie lautet die Schwerpunktsgeschwindigkeit v<br />
OS 1 , K<br />
?<br />
Bestimmen Sie die Drehgeschwindigkeitsvektoren K<br />
K ,<br />
K<br />
<strong>und</strong> <br />
KK<br />
, K<br />
.<br />
Kinetik (im Weiteren werden nur die Basis <strong>und</strong> Arm 1 betrachtet)<br />
Berechnen Sie den Trägheitstensor I AS<br />
des Arms 1 bezogen auf den Schwerpunkt,<br />
dargestellt im armfesten System. Das Trägheitsmoment um die Längsachse soll<br />
vernächlässigt werden ( M9, Formel für dünner Stab).<br />
Wie stellt sich der Trägheitstensor I<br />
AS, K<br />
im Inertialsystem dar ?<br />
<br />
Berechnen Sie die kinetische <strong>und</strong> potentielle Energie des Systems aus Arm 1 <strong>und</strong> Platte<br />
1. Berechnen Sie die kinetische Energie der Platte.<br />
2. Bestimmen Sie die kinetische Energie von Arm 1 (Hinweis: Verwenden Sie die<br />
Darstellung im Inertialsystem).<br />
3. Berechnen Sie die potentielle Energie der beiden Körper.