Mikropositioniersysteme Micro Positioning Systems - ORLIN ...
Mikropositioniersysteme Micro Positioning Systems - ORLIN ...
Mikropositioniersysteme Micro Positioning Systems - ORLIN ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
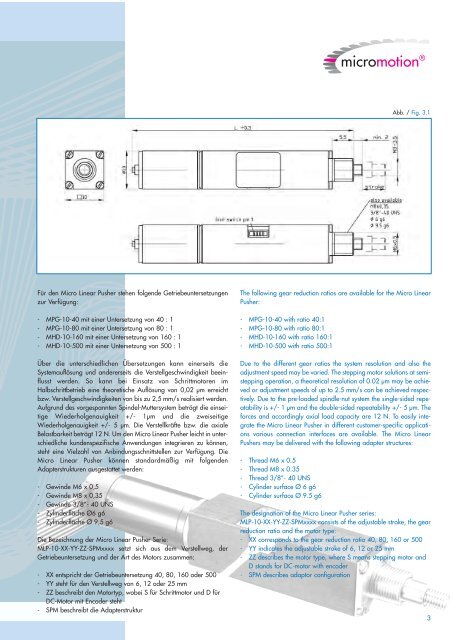
Abb. / Fig. 3.1<br />
Für den <strong>Micro</strong> Linear Pusher stehen folgende Getriebeuntersetzungen<br />
zur Verfügung:<br />
- MPG-10-40 mit einer Untersetzung von 40 : 1<br />
- MPG-10-80 mit einer Untersetzung von 80 : 1<br />
- MHD-10-160 mit einer Untersetzung von 160 : 1<br />
- MHD-10-500 mit einer Untersetzung von 500 : 1<br />
Über die unterschiedlichen Übersetzungen kann einerseits die<br />
Systemauflösung und andererseits die Verstellgeschwindigkeit beeinflusst<br />
werden. So kann bei Einsatz von Schrittmotoren im<br />
Halbschrittbetrieb eine theoretische Auflösung von 0,02 µm erreicht<br />
bzw. Verstellgeschwindigkeiten von bis zu 2,5 mm/s realisiert werden.<br />
Aufgrund des vorgespannten Spindel-Muttersystem beträgt die einseitige<br />
Wiederholgenauigkeit +/- 1µm und die zweiseitige<br />
Wiederholgenauigkeit +/- 5 µm. Die Verstellkräfte bzw. die axiale<br />
Belastbarkeit beträgt 12 N. Um den <strong>Micro</strong> Linear Pusher leicht in unterschiedliche<br />
kundenspezifische Anwendungen integrieren zu können,<br />
steht eine Vielzahl von Anbindungsschnittstellen zur Verfügung. Die<br />
<strong>Micro</strong> Linear Pusher können standardmäßig mit folgenden<br />
Adapterstrukturen ausgestattet werden:<br />
- Gewinde M6 x 0,5<br />
- Gewinde M8 x 0,35<br />
- Gewinde 3/8’’- 40 UNS<br />
- Zylinderfläche Ø6 g6<br />
- Zylinderfläche Ø 9,5 g6<br />
Die Bezeichnung der <strong>Micro</strong> Linear Pusher Serie:<br />
MLP-10-XX-YY-ZZ-SPMxxxx setzt sich aus dem Verstellweg, der<br />
Getriebeuntersetzung und der Art des Motors zusammen:<br />
- XX entspricht der Getriebeuntersetzung 40, 80, 160 oder 500<br />
- YY steht für den Verstellweg von 6, 12 oder 25 mm<br />
- ZZ beschreibt den Motortyp, wobei S für Schrittmotor und D für<br />
DC-Motor mit Encoder steht<br />
- SPM beschreibt die Adapterstruktur<br />
The following gear reduction ratios are available for the <strong>Micro</strong> Linear<br />
Pusher:<br />
- MPG-10-40 with ratio 40:1<br />
- MPG-10-80 with ratio 80:1<br />
- MHD-10-160 with ratio 160:1<br />
- MHD-10-500 with ratio 500:1<br />
Due to the different gear ratios the system resolution and also the<br />
adjustment speed may be varied. The stepping motor solutions at semistepping<br />
operation, a theoretical resolution of 0.02 µm may be achieved<br />
or adjustment speeds of up to 2.5 mm/s can be achieved respectively.<br />
Due to the pre-loaded spindle-nut system the single-sided repeatability<br />
is +/- 1 µm and the double-sided repeatability +/- 5 µm. The<br />
forces and accordingly axial load capacity are 12 N. To easily integrate<br />
the <strong>Micro</strong> Linear Pusher in different customer-specific applications<br />
various connection interfaces are available. The <strong>Micro</strong> Linear<br />
Pushers may be delivered with the following adapter structures:<br />
- Thread M6 x 0.5<br />
- Thread M8 x 0.35<br />
- Thread 3/8”- 40 UNS<br />
- Cylinder surface Ø 6 g6<br />
- Cylinder surface Ø 9.5 g6<br />
The designation of the <strong>Micro</strong> Linear Pusher series:<br />
MLP-10-XX-YY-ZZ-SPMxxxx consists of the adjustable stroke, the gear<br />
reduction ratio and the motor type:<br />
- XX corresponds to the gear reduction ratio 40, 80, 160 or 500<br />
- YY indicates the adjustable stroke of 6, 12 or 25 mm<br />
- ZZ describes the motor type, where S means stepping motor and<br />
D stands for DC-motor with encoder<br />
- SPM describes adaptor configuration<br />
3