1. KenngröÃen von MeÃgeräten
1. KenngröÃen von MeÃgeräten
1. KenngröÃen von MeÃgeräten

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
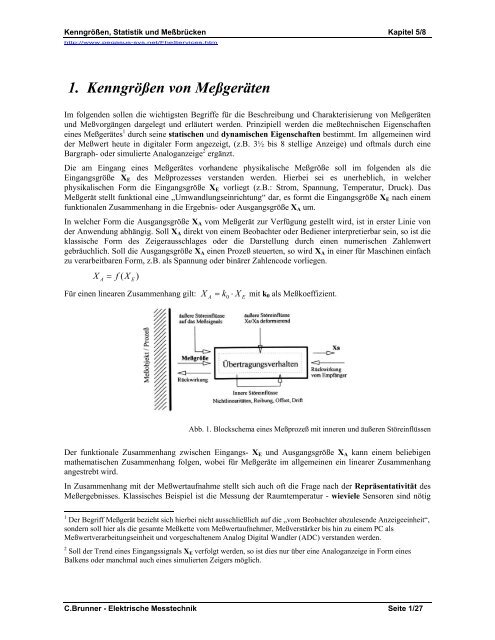
<strong>1.</strong> Kenngrößen <strong>von</strong> Meßgeräten<br />
Im folgenden sollen die wichtigsten Begriffe für die Beschreibung und Charakterisierung <strong>von</strong> Meßgeräten<br />
und Meßvorgängen dargelegt und erläutert werden. Prinzipiell werden die meßtechnischen Eigenschaften<br />
eines Meßgerätes 1 durch seine statischen und dynamischen Eigenschaften bestimmt. Im allgemeinen wird<br />
der Meßwert heute in digitaler Form angezeigt, (z.B. 3½ bis 8 stellige Anzeige) und oftmals durch eine<br />
Bargraph- oder simulierte Analoganzeige 2 ergänzt.<br />
Die am Eingang eines Meßgerätes vorhandene physikalische Meßgröße soll im folgenden als die<br />
Eingangsgröße X E des Meßprozesses verstanden werden. Hierbei sei es unerheblich, in welcher<br />
physikalischen Form die Eingangsgröße X E vorliegt (z.B.: Strom, Spannung, Temperatur, Druck). Das<br />
Meßgerät stellt funktional eine „Umwandlungseinrichtung“ dar, es formt die Eingangsgröße X E nach einem<br />
funktionalen Zusammenhang in die Ergebnis- oder Ausgangsgröße X A um.<br />
In welcher Form die Ausgangsgröße X A vom Meßgerät zur Verfügung gestellt wird, ist in erster Linie <strong>von</strong><br />
der Anwendung abhängig. Soll X A direkt <strong>von</strong> einem Beobachter oder Bediener interpretierbar sein, so ist die<br />
klassische Form des Zeigerausschlages oder die Darstellung durch einen numerischen Zahlenwert<br />
gebräuchlich. Soll die Ausgangsgröße X A einen Prozeß steuerten, so wird X A in einer für Maschinen einfach<br />
zu verarbeitbaren Form, z.B. als Spannung oder binärer Zahlencode vorliegen.<br />
X = f ( X ) E<br />
A<br />
Für einen linearen Zusammenhang gilt:<br />
X<br />
A<br />
= k 0<br />
⋅ X mit k 0 als Meßkoeffizient.<br />
E<br />
Abb. <strong>1.</strong> Blockschema eines Meßprozeß mit inneren und äußeren Störeinflüssen<br />
Der funktionale Zusammenhang zwischen Eingangs- X E und Ausgangsgröße X A kann einem beliebigen<br />
mathematischen Zusammenhang folgen, wobei für Meßgeräte im allgemeinen ein linearer Zusammenhang<br />
angestrebt wird.<br />
In Zusammenhang mit der Meßwertaufnahme stellt sich auch oft die Frage nach der Repräsentativität des<br />
Meßergebnisses. Klassisches Beispiel ist die Messung der Raumtemperatur - wieviele Sensoren sind nötig<br />
1 Der Begriff Meßgerät bezieht sich hierbei nicht ausschließlich auf die „vom Beobachter abzulesende Anzeigeeinheit“,<br />
sondern soll hier als die gesamte Meßkette vom Meßwertaufnehmer, Meßverstärker bis hin zu einem PC als<br />
Meßwertverarbeitungseinheit und vorgeschaltenem Analog Digital Wandler (ADC) verstanden werden.<br />
2 Soll der Trend eines Eingangssignals X E verfolgt werden, so ist dies nur über eine Analoganzeige in Form eines<br />
Balkens oder manchmal auch eines simulierten Zeigers möglich.<br />
C.Brunner - Elektrische Messtechnik Seite 1/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
um diese repräsentativ zu erfassen. Wo und wie werden diese angeordnet. Die Frage nach der<br />
Repräsentativität ist vor allem bei der Messung <strong>von</strong> Feldgrößen <strong>von</strong> Interesse (z.B.<br />
Strömungsgeschwindigkeit, Konzentration, Feldstärke, o.ä.).<br />
Der funktionale Zusammenhang X A /X E wird durch die Meßcharakteristik dargestellt. Diese kann durch ein<br />
Polynom n-ten Grades beschrieben werden. In der Meßtechnik ist man aber bestrebt einen linearen X A /X E<br />
Zusammenhang zu erreichen.<br />
Abb. 2. Idealisierter Meßprozeß mit Kennlinie, rechts: verschiedene lineare Übertragungsverhalten<br />
Obige Kennlinien stellen den stationären Zusammenhang (d.h. alle Einschwing- oder Ausgleichsvorgänge<br />
sind bereits abgeklungen) zwischen Eingangs- X E und Ausgangsgröße X A für ein beliebiges Meßgerät dar.<br />
Links: Nicht lineare Kennlinie – der funktionale Verlauf kann durch beliebig komplizierte mathematische<br />
Funktionen beschrieben werden, Rechts: Lineare Kennlinien mit natürlichem Nullpunkt (A), unterdrücktem<br />
Nullpunkt 3 (B) und verschobenem oder lebendem 4 (C) Nullpunkt. Aus den Kennlinien kann direkt die<br />
Empfindlichkeit ε des Meßgerätes bestimmt werden. Diese ist durch die erste Ableitung der Ausgangsgröße<br />
X A nach der Eingangsgröße X E gegeben.<br />
Empfindlichkeit ε :<br />
ε =<br />
dX<br />
dX<br />
A<br />
E<br />
Für den Fall einer linearen Kennlinie ist die Empfindlichkeit ε somit eine Konstante, anderenfalls kann die<br />
Empfindlichkeit im jeweiligen Arbeitspunkt durch die Tangente an die Kennlinie genähert werden.<br />
<strong>1.</strong><strong>1.</strong> Meßcharakteristik<br />
Für die folgenden Ausführungen soll ein linearer Zusammenhang zwischen X E und X A vorausgesetzt<br />
werden. Die verschiedenen Einflußgrößen, die eine Verzerrung der linearen Kennlinie bewirken, sollen<br />
3 Als Beispiel für einen unterdrückten Nullpunkt kann die Temperaturmessung über die °C Skala gesehen werden, alle<br />
absoluten Temperaturen unter 273,15 °K resultieren in einer Ausgangsgröße X A = 00°C. Ein anderer Anwendungsfall<br />
wäre die Luftdruckmessung. Eine Messbereich <strong>von</strong> 000 ... 1100 mbar ist nicht sinnvoll, da im allgemeinen<br />
Luftdruckwerte unter 900mbar für Meeresniveau nie erreicht werden.<br />
4 Ein lebender Nullpunkt bietet in all jenen Anwendungsfällen Vorteile, bei denen auch bei einer Eingangsgröße X E =<br />
00 eine Ausgangsgröße X A ≠ 00 vorhanden sein sollte, um die korrekte Funktion des Meßgerätes überprüfen zu können<br />
(z.B. ein klassisches Beispiel hierfür ist das 4 .. 20mA Stromschleifen Interface für remote Meßstellen. Der<br />
Meßwertgeber arbeitet über einen eingeprägten Strom <strong>von</strong> 4 ... 20mA. Ein Wert <strong>von</strong> 00mA würde sinngemäß einer<br />
Stromschleifenunterbrechung gleichkommen).<br />
C.Brunner - Elektrische Messtechnik Seite 2/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
vorgestellt werden. Die unverzerrte lineare X A /X E Kennlinie wird als Sollcharakteristik C soll , die durch die<br />
realen Eigenschaften des Meßgerätes und andere Einflüsse (Temperaturkoeffizient, Offset und Drift)<br />
verzerrte X A /X E Kennlinie wird als Istcharakteristik C ist bezeichnet.<br />
Hat das Meßgerät einen natürlichen Nullpunkt, C soll geht durch den Koordinatennullpunkt, so kann die<br />
Sollcharakteristik C soll durch den Meßkoeffizient MK ersetzt werden.<br />
<strong>1.</strong> Analoge Meßwertverarbeitung<br />
Eine lineare Meßcharakteristik ist bei analogen Meßgeräten durch eine Gerade darstellbar. Aus der Differenz<br />
zwischen C soll und C ist ergibt sich der Fehler der Messung oder die Abweichung.<br />
Abb. 3. Beispiel einer analogen Meßcharakteristik, Soll C SOLL - und Istverläufe C IST mit Fehlerkurve F<br />
Bei bekannter Istcharakteristik C IST des Meßgerätes kann somit die Ausgangsgröße X A um den Fehler F<br />
korrigiert werden 5 . Für den Fehler F gilt somit:<br />
F X ) = C ( X ) − C ( X )<br />
(<br />
E IST E SOLL E<br />
Entsprechend stellt der Begriff des Meßfehlers F die Differenz der tatsächlich erzeugten Meßgröße X A_real<br />
und der idealen Ausgangsgröße X A_ideal eines Meßgerätes (oder Prozesses) dar.<br />
2. Digitale Meßwertverarbeitung<br />
Die analoge Meßwertverarbeitung ist durch eine „subjektive Meßwertquantifizierung“ durch den Beobachter<br />
gekennzeichnet. Dieser ordnet dem Zeigerausschlag α über einer Skala einen Zahlenwert zu und führt somit<br />
die Digitalisierung des Meßwertes durch. Im Gegensatz hierzu ist die digitale Meßwertverarbeitung durch<br />
eine objektive Quantifizierung der analogen Information durch das Meßgerät selbst gekennzeichnet 6 .<br />
5 Es sei hier angemerkt, daß diese Korrektur natürlich nur die systematisch erfaßbaren Fehlerquellen beinhalten kann.<br />
Statistische Fehler und Umwelteinflüsse sind natürlich keiner Korrektur zugänglich. Der obige Meßfehler F wird<br />
deshalb auch als systematischer Meßfehler bezeichnet. Siehe auch Kapitel <strong>1.</strong>3. Meßfehler.<br />
6 Es liegt in der Natur der Sache, daß beim Ablesen <strong>von</strong> digitalen Meßgeräten keinerlei Ablesefehler mehr auftreten<br />
können, da das Ergebnis bereits in Form eines digitalen Zahlenwertes vorliegt.<br />
C.Brunner - Elektrische Messtechnik Seite 3/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Wie bei jeder Digitalisierung wird durch das Quantisieren der analogen Meßwerte ein Informationsverlust<br />
bedingt, der eine verlustfreie Umkehrung des Digitalisierungsprozesses unmöglich macht. Bei der<br />
Digitalisierung wird ein Bereich analoger Information, das so genannte Quantisierungsintervall IB, auf<br />
einen digitalen Zahlenwert 7 abgebildet. Dies führt zu einem stufenförmigen Verlauf der X A /X E Kennlinie.<br />
Abb. 4. Beispiel einer unstetigen Meßcharakteristik, Soll C SOLL - und Istverläufe C IST mit Fehlerkurve<br />
Die Quantisierungsintervalle IB 8 werden im allgemeinen so gelegt, daß für den Intervallmittenwert der<br />
auftretende Quantisierungsfehler F zu Null wird. Dies hat den Vorteil, daß der Quantisierungsfehler F<br />
symmetrisch zur Nullinie liegt und die maximale Größe +/⎯ ½ LSB 9 (Least Significant Bit) nicht<br />
übersteigt (ideale Stufencharakteristik vorausgesetzt). Es sind aber auch Realisierungen mit einseitigem<br />
Quantisierungsfehler F gebräuchlich, dieser läuft <strong>von</strong> 0 ... 1 LSB.<br />
7 Die Abbildung auf einen binären Zahlenwert wird wieder durch den Anwendungsfall bestimmt. Im einfachsten Fall<br />
können aufeinanderfolgende Quantisierungsintervalle durch eine binäre Zahlenfolge codiert werden, die Gewichtung<br />
ist durch das binäre Zahlensystem vorgegeben und als 8–4–2–1 Code bekannt. Andere Codeformen mit<br />
unterschiedlicher Gewichtung wären z.B. 6–3–1–1, 2 out of 5, Gray- oder Huffmancode.<br />
Eine weitere sehr weit verbreitete Kodeform ist der Binary Coded Decimal – BCD Code. Hierbei werden die einzelnen<br />
Digits der dezimalen Zahl binär kodiert, es werden also für jede Stelle im Dezimalsystem 4 bits verwendet. Die<br />
Codierung der Zahl „987“ würde somit 12 bits benötigen. Im Binärsystem wären hingegen 10 bits ausreichend.<br />
8 Zusätzlich wird durch die Quantisierung dem ursprünglich amplitudenkontinuierlichen Signal ein Rauschanteil<br />
hinzugefügt. Dieses Quantisierungsrauschen entsteht durch die Zuordnung der abgetastet Werte zu einem bestimmten<br />
Quantisierungsintervall IB N . Die Rauschleistung N Q ist gleich verteilt und läßt sich folgendermaßen berechnen:<br />
2<br />
IB<br />
N Q<br />
=<br />
12<br />
Das Quantifizierungsrauschen N Q steigt somit quadratisch mit dem Quantisierungsintervall IB an.<br />
9 Die Bezeichnung LSB resultiert aus der Zahlendarstellung allgemein. Beim dualen Zahlensystem gibt es zusätzlich<br />
nur zwei mögliche Ziffern 0 oder 1, und die einzelnen Ziffern werden als bit bezeichnet. Die letzte Stelle (am<br />
weitesten rechts stehende Ziffer) leistet den geringsten Beitrag für die Wertigkeit der Zahl und wird deshalb als least<br />
significant bit bezeichnet. Im Gegensatz hierzu, wird die am weitesten links stehende Ziffer als MSB oder most<br />
significant bit bezeichnet.<br />
C.Brunner - Elektrische Messtechnik Seite 4/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Über die Skalierung des Quantisierungsfehlers F hinausgehend wird der Ausdruck LSB ebenfalls für die<br />
Charakterisierung der Auflösung des Meßgerätes (kleinste nachweisbare Änderung des Meßwertes)<br />
verwendet. Wird z.B. für die Darstellung des Meßwertes eine 8-bit Zahl verwendet, so lassen sich mit dieser<br />
Zahl 2 8 = 256 verschiedene Stufen codieren. Dies bedeutet für einen Eingangssignalbereich X E <strong>von</strong> 0 – 10V<br />
eine notwendige minimale Spannungsänderung <strong>von</strong> 10V / 256 = 39mV, um eine Änderung der<br />
Ausgangsgröße X A zu erreichen 10 .<br />
Der Quantisierungsfehlers F ist im eigentlichen Sinne des Wortes kein Fehler, da er eine notwendige<br />
Konsequenz der Quantisierung der Ausgangsgröße X A darstellt. Er sollte deshalb besser als<br />
Quantifizierungsunsicherheit bezeichnet werde. Der Ausdruck Quantisierungsfehler ist jedoch in der<br />
Literatur so weit verbreitet, daß er auch hier verwendet werden soll.<br />
Ein weiterer, durch die Unstetigkeit der Stufencharakteristik bedingter, Effekt ist das Springen der letzten<br />
Stelle bei digitalen Anzeigen. Diese sogenannte Bewertungsunsicherheit ergibt sich bei einem ideal<br />
arbeitenden Gerät aus den Unstetigkeitsstellen der X A /X E Kennlinie, die eine eindeutige Zuordnung für den<br />
Fall, daß X E an einer Intervallgrenze 11 liegt, unmöglich macht.<br />
<strong>1.</strong>2. Meßbereiche und Definitionen<br />
Reale Meßgeräte werden immer für einen bestimmten Meßbereich MB spezifiziert, wobei vielfach durch ein<br />
vorhandenes auto-ranging dieser Meßbereich automatisch umgeschalten und auch ausgewählt wird.<br />
Meßbereiche können je nach Anwendung symmetrisch zum Nullpunkt (z.B. Spannungsmessung) oder auch<br />
asymmetrisch (z.B. Temperaturmessung in Kelvin K oder absoluter Druck in Pascal P oder mbar - Negative<br />
Werte wären physikalisch sinnlos ) liegen.<br />
Oftmals wird der Nullpunkt auch unterdrückt um eine größere Auflösung im interessierenden Bereich zu<br />
erreichen. Eine Anwendung hierfür wäre die Luftdruckmessung in mbar. Die Skalierung des Gerätes wird<br />
hier nicht bei Null beginnen, sondern einen gewissen Bereich um 1000mbar umfassen. Hierdurch kann im<br />
relevanten Bereich eine wesentlich größere Auflösung erreicht werden. Ein ähnlicher Anwendungsfall wäre<br />
die Raumtemperaturmessung in °K für techn. – wissenschaftliche Zwecke.<br />
Abb. 5. Asymmetrischer MB (links), symmetrischer MB 12 (Mitte) und unterdrückter Nullpunkt (rechts)<br />
10 Abschließend sei noch einmal darauf hingewiesen, daß die Quantisierung der Eingangsgröße X E eine nicht<br />
umkehrbare Transformation ist. Es ist nicht möglich <strong>von</strong> der Ausgangsgröße X A auf den ursprünglichen Wert <strong>von</strong> X E<br />
zurück zuschließen. Die Lage <strong>von</strong> X E innerhalb des Quantisierungsintervalls geht durch die Digitalisierung<br />
unwiederbringlich verloren. Dies ist nicht auf eine nicht-ideale Funktionsweise <strong>von</strong> Baugruppen, Umgebungseinflüsse<br />
oder statistische Fehler zurückzuführen, sondern ist eine notwendige Eigenschaft der Quantisierung.<br />
11 Liegt X E exakt an einer Intervallgrenze so fällt der digitalisierte Wert X A , bedingt durch das stets vorhanden<br />
Rauschen, statistisch in das rechte oder linke Quantisierungsintervall IB + oder IB ⎯ . Hierdurch ist das statistische<br />
Schwanken des LSBs bedingt.<br />
12 Ein typischer Anwendungsbereich für einen symmetrischen MB stellen die Nullpunktsindikatoren dar. Dies sind<br />
Meßgeräte die nicht für das Messen absoluter Werte ausgelegtt sind, sondern lediglich für die Detektion eines<br />
C.Brunner - Elektrische Messtechnik Seite 5/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Die Fehlerangaben <strong>von</strong> Meßgeräten werden im allgemeinen auf den Meßbereichsendwert (Full Scale Range<br />
/ Reading FSR) bezogen (in %). Für hochauflösende digitale Multimeter wird der Meßfehler getrennt für<br />
den Meßwert MW und den Meßbereich MB spezifiziert, z.B. für die Effektivwertmessung bei<br />
Wechselspannung im Frequenzbereich 10 Hz ... 20kHz: ∆F = 0,06 + 0,04. Der Gesamtfehler ergibt sich<br />
somit aus 0,06% vom MW plus 0,04% vom MB.<br />
Für MG Spezifikationen siehe auch http://www.tm.agilent.com (früher HP)<br />
http://www.fluke.com<br />
Auflösung Analog: Für analoge Meßgeräte definiert sich die Auflösung aus der Bedingung einer<br />
reproduzierbaren oder nachweisbaren Änderung der Ausgangsgröße X A (z.B. des<br />
Zeigerausschlages bei klassischen Geräten ) für eine gegebene Skalierung. Das<br />
bedeutet im Gegenzug, daß all jene Änderungen der Eingangsgröße X E nicht mehr<br />
aufgelöst werden können, die keine detektierbare Änderung der Ausgangsgröße X A<br />
bewirken.<br />
Auflösung Digital: Für digitale Meßgeräte und im speziellen für Digital to Analog Converter DAC ist<br />
die erreichbare Auflösung nur <strong>von</strong> der Breite des verwendet binären Datenwortes<br />
abhängig, wobei gilt, daß bei Verwendung <strong>von</strong> n bits der Meßbereich in 2 n<br />
Intervalle 13 unterteilt werden kann und somit einer Auflösung <strong>von</strong> FSR / 2 n erreicht<br />
wird. Die Auflösung entspricht somit dem LSB.<br />
Die Definition der Auflösung basiert für analoge als auch digitale MG auf dem identen Prinzip einer<br />
detektierbaren Änderung der Ausgangsgröße X A .<br />
Genauigkeit: Im Zusammenhang mit der Genauigkeit <strong>von</strong> Meßgeräten sind keinerlei quantitative<br />
oder absolut bewertbare Maße definiert. Die Genauigkeits-angaben können lediglich<br />
für vergleichende Zwecke herangezogen werden 14 .<br />
Empfindlichkeit: Die Empfindlichkeit ε ist im allgemeinen über die notwendige Änderung der<br />
Eingangsgröße X E für das Erreichen einer gewissen Änderung der Ausgangsgröße<br />
X A definiert. Dies entspricht dem Differentialquotienten.<br />
ε =<br />
lim<br />
∆X<br />
E →0<br />
∆X<br />
∆X<br />
A<br />
E<br />
dX<br />
=<br />
dX<br />
A<br />
E<br />
Für die unstetige Stufencharakteristik ist die Kennlinie natürlich nicht mehr<br />
differenzierbar. Die Empfindlichkeit ε muß über den Differenzenquotienten<br />
angegeben werden 15 :<br />
stromlosen oder leistungslosen Zustands verwendet werden. Dies zeigen somit um den Nullpunkt die maximale<br />
Empfindlichkeit.<br />
13 In der Meßtechnik wird in den allermeisten Fällen das MSB des ADC für die Darstellung des Vorzeichens<br />
verwendet. Die Auflösung im MB reduziert sich hiermit auf n–1 bit. Die Auflösung des Wandlers bleibt natürlich<br />
unverändert, da sich durch das Vorzeichenbit der Eingangsbereich des Wandlers ja verdoppelt (symmetrisch zu Null).<br />
14 Oft werden die Begriffe Genauigkeit und Auflösung im gleichen Sinne verwendet, dies ist jedoch grundsätzlich nicht<br />
richtig. Vor allem im Bereich hochauflösender ADCs (24-bit) ist die absolute Genauigkeit des Wandlungsergebnisses<br />
wesentlich schlechter als die Auflösung (LSB). Der Einsatz dieser hochauflösenden Wandler für Messungen <strong>von</strong><br />
relativen Änderungen ist aber durchaus sinnvoll.<br />
15 Hierbei wird vorausgesetzt, daß die Intervallbreite IB und die Stufenhöhe X a (n+1) – X a (n) für die gesamte<br />
Stufencharakteristik konstant ist.<br />
C.Brunner - Elektrische Messtechnik Seite 6/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
ε =<br />
∆X<br />
∆X<br />
X<br />
( n + 1) − X<br />
IB<br />
( n<br />
A A<br />
A<br />
)<br />
E<br />
=<br />
Größte Bedeutung hat die Empfindlichkeit in Zusammenhang mit Meßbrücken bei Nulldetektoren. Diese<br />
Meßgeräte zeigen einen symmetrischen MB, die Genauigkeit hat keine Bedeutung und die Empfindlichkeit<br />
im Nullpunkt wird maximiert.<br />
Eichung:<br />
Unter dem Begriff Eichung wird die <strong>von</strong> einer zuständigen Eichbehörde<br />
durchgeführte Prüfung verstanden. Zweck der Prüfung ist die Bestimmung, ob ein<br />
Gerät innerhalb der spezifizierten Eichfehlergrenzen liegt.<br />
Kalibrierung: Als Kalibrierung wird die Vergleichsmessung mit einem Eichmeßgerät (oder<br />
geeichtem MG) verstanden. Sie dient zur Bestimmung der Istcharakteristik C IST aus<br />
der ebenfalls der systematische Meßfehler F bestimmt werden kann.<br />
<strong>1.</strong>3. Meßfehler<br />
Das theoretischer Ziel jeder Messung ist natürlich die exakte Bestimmung des wahren Wertes X w einer<br />
Meßgröße. Dies ist jedoch praktisch unmöglich, da die zu bestimmende Meßgröße oder der Prozeß durch das<br />
Einbringen des Meßgerätes, durch den Beobachter oder auch durch Umwelteinflüsse gestört wird. Die<br />
hierdurch bewirkte Abweichung oder der Meßfehler F kann durch den absoluten Fehler F ABS oder relativen<br />
Fehler f REL charakterisiert werden. Mit X A als Ausgangsgröße oder angezeigter Wert gilt:<br />
F<br />
ABS<br />
= X − X<br />
oder<br />
A<br />
W<br />
X<br />
− X<br />
A W<br />
f<br />
REL<br />
= =<br />
XW<br />
Eine weitere typische Fehlerquelle ist der Betrieb der Meßgeräte in einem nicht spezifizierten Temperaturoder<br />
Frequenzbereich 16 , somit eine unsachgemäße Anwendung der Geräte.<br />
Die durch Störungen bewirkten Meßabweichungen lassen sich in systematische Abweichungen und<br />
statistische Abweichungen einteilen. Erstere sind ihrer Natur nach bekannt und folgedessen einer Korrektur<br />
zugänglich. So bewirkt z.B. das Einschalten eines realen Strommeßgerätes in einen Stromkreis durch die<br />
Erhöhung des Kreiswiderstandes immer eine Verminderung des zu bestimmenden Stromes. Diese<br />
Beeinflussung des Kreises ist aber im allgemeinen berechenbar und somit auch korrigierbar. Es treten aber<br />
auch systematische Abweichungen auf, die ihrer Natur nach kausal, aber in ihrer exakten Größe nicht<br />
bestimmbar sind (z.B. Alterung der Meßgeräte, Temperaturdrifts). Diese Abweichungen sind nicht exakt<br />
korrigierbar. Die Korrekturwerte können hier nur geschätzt werden.<br />
Die statistischen Abweichungen sind, wie bereits der Namen andeutet, in ihrer Größe nicht erfaßbar, nicht<br />
gerichtet und rein zufälliger Natur. Eine Beschreibung dieser Fehler ist aber mit Mitteln der Statistik<br />
möglich. Im Rahmen einer Meßreihe werden für eine Meßgröße mehrere Einzelmessung durchgeführt. Aus<br />
dieser Meßreihe lassen sich dann für die Meßgröße sogenannte Schätzwerte für den Mittelwert µ und<br />
Standardabweichung σ bestimmen (Siehe Kapitel <strong>1.</strong>4 Grundlagen der Statistik).<br />
F<br />
X<br />
ABS<br />
W<br />
16 Ein klassisches Beispiel für die unsachgemäße Verwendung <strong>von</strong> Meßgeräten ist die Bestimmung <strong>von</strong> Effektivwerten<br />
<strong>von</strong> nicht sinusförmigen Wechselsignale oder außerhalb des spezifizierten Frequenzbereiches. Einfache Meßgeräte<br />
leiten den Effektivwert aus dem Gleichrichtwert über eine Berechnung auf der Grundlage des Formfaktors für<br />
sinusförmige Signale ab. Werden diese Geräte für Messungen bei nicht sinusförmigen Größen eingesetzt, so beinhaltet<br />
der angezeigte Wert natürliche einen systematischen Fehler.<br />
C.Brunner - Elektrische Messtechnik Seite 7/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
<strong>1.</strong> Systematische Abweichungen bei analogen Meßgeräten<br />
Die systematischen Abweichungen sind einerseits in der Beeinflussung des Prozesses durch das Einbringen<br />
eines nicht idealen Meßgerätes begründet. Durch die konstruktiven Mängel des Meßgerätes werden sich<br />
andererseits auch Abweichungen in der X A /X E Kennlinie des Meßgerätes ergeben. Die ideale<br />
Sollcharakteristik C soll wird hierdurch zur realen Istcharakteristik C ist verzerrt. Die wichtigsten Fehlerarten<br />
sollen im folgenden kurz erläutert werden.<br />
Abb. 6. Systematische Fehler eines Meßgerätes, Nullpunktsfehler (A), Verstärkungsfehler (B), integraler<br />
Linearitätsfehler (C), differentieller Linearitätsfehler (D)<br />
Nullpunktsfehler: Der Nullpunktsfehler (A) ergibt sich durch eine Verschiebung der idealen Kennlinie<br />
C soll . Er ist in erster Linie durch Offsetdrifts innerhalb des Meßgerätes bedingt und<br />
kann im allgemeinen einfach kompensiert werden 17 .<br />
Verstärkungsfehler: Der Verstärkungs- oder Steigungsfehler (B) ergibt sich durch eine Drehung der<br />
idealen Kennlinie C soll . Er kann im allgemeinen durch einfaches Ändern der<br />
Verstärkung oder des Meßkoeffizienten MK kompensiert werden 18 .<br />
Integraler Linearitätsfehler: Als integraler Linearitätsfehler (C) wird üblicherweise die<br />
maximale Abweichung der Istcharakteristik C ist <strong>von</strong> der<br />
Sollcharakteristik C soll bezeichnet.<br />
Wird der Abgleich des Meßgerätes nicht auf Fehlerfreiheit im Nullpunkt und Meßbereichsendwert, sondern<br />
auf minimale Fehlerquadrate durchgeführt, so ergibt sich im allgemeinen ein wesentlich kleinerer integraler<br />
Linearitätsfehler.<br />
Differentieller Linearitätsfehler:<br />
Der differentielle Linearitätsfehler (D) stellt den maximalen<br />
Unterschied der <strong>1.</strong> Ableitung <strong>von</strong> Istcharakteristik C ist und<br />
Sollcharakteristik C soll dar. Er beschreibt somit den Linearitätsfehler<br />
der Meßcharakteristik im jeweiligen Arbeitspunkt.<br />
17 Typische Ursache für das Auftreten <strong>von</strong> Nullpunktsfehlern bei klassischen Zeigerinstrumenten ist eine falsche<br />
Betriebslage oder fehlender Nullabgleich der Zeigerposition. Bei modernen elektronischen MG kann der Nullpunktsfehler<br />
durch Offsetspannungen der Meßverstärker bedingt sein.<br />
18 Durch Änderung der Federkonstante zufolge der Alterung bei klassischen Zeigerinstrumenten. Durch Alterung <strong>von</strong><br />
Bauelementen im Signalfluß der Meßverstärker (z.B. Widerstände des Gegenkopplungsnetzwerkes) oder durch den<br />
Drift <strong>von</strong> Referenzspannungen der ADCs im MG.<br />
C.Brunner - Elektrische Messtechnik Seite 8/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Neben den oben erläuterten Fehlergrößen können auch noch Hysteresefehler auftreten, z.B. durch Meßgerät<br />
mit magnetischen Wandlern oder bei klassischen Zeigerinstrumenten durch Lagerreibungskräfte.<br />
2. Systematische Abweichungen bei digitalen Meßgeräten<br />
Neben den bei analogen Meßgeräten erläuterten Fehlergrößen können bei digitaler Meßwertverarbeitung<br />
noch zusätzliche, durch die Quantisierung der analogen Information bedingte, Fehler auftreten.<br />
Abb. 7. Systematische Fehler bei der Quantisierung, variierende Intervallbreite (A), missing code (B), nicht monotone,<br />
nicht eindeutige Wandlung (C)<br />
Differentieller Linearitätsfehler: Eine veränderliche Größe der Intervallbreite IB führt auf einen<br />
differentiellen Linearitätsfehler (A). Dieser kann bei unstetigen<br />
Charakteristiken nicht mehr aus dem Unterschied der <strong>1.</strong> Ableitungen<br />
<strong>von</strong> Istcharakteristik C ist und Sollcharakteristik C soll berechnet<br />
werden, sondern muß über den Differenzenquotienten bestimmt<br />
werden.<br />
Missing code: Werden die Verschiebungen der Intervallgrenzen so groß, daß diese über ein<br />
benachbartes Intervall hinausgeschoben werden, so tritt der Digitalcode für das<br />
entsprechende Intervall überhaupt nicht mehr auf (B). In diesem Fall zeigt die<br />
Wandlung einen missing code Fehler. Dieser Fehler ist vor allem bei sehr<br />
hochauflösenden Wandlern verbreitet.<br />
Monotonie: Wird die Eingangsgröße X E monoton vergrößert und steigt die Wertigkeit der<br />
entsprechenden Digitalwerte <strong>von</strong> X A nicht ebenfalls stetig an, so spricht man <strong>von</strong><br />
einem nicht monotonen Wandler (C). Zusätzlich kann in diesem Fall das<br />
Wandlungsergebnis auch mehrdeutig sein, da X E Werte aus verschiedenen<br />
Quantisierungsintervallen auf den gleichen X A Wert abgebildet werden.<br />
<br />
3. Fehlerklassen<br />
Die Fehlerklassen wurden im Zusammenhang mit den klassischen elektromagnetischen / mechanischen<br />
Zeigerinstrumenten definiert. Die Fehlerklasse wurde auf den Meßbereich MB spezifiziert und gibt den<br />
maximalen Fehler für den Meßbereichsendwert MBE an. Da der Klassenfehler in % vom MBE angegeben<br />
ist, wird der Meßfehler für Messungen im unteren Bereich des Meßbereiches MB dementsprechend größer.<br />
C.Brunner - Elektrische Messtechnik Seite 9/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Klassische Fehlerklassen: 1,5 / 1,0 / 0,5 / 0,2 / 0,1<br />
<br />
Für die heute üblichen elektronischen Meßgeräte wird der Meßfehler meist als Summe eines<br />
Nullpunktsfehlers (ist über den gesamten MB konstant) und eines Steigungsfehlers angegeben. Für<br />
Präzisionsmeßgeräte ist es auch üblich die Einflußgrößen getrennt zu spezifizieren, so z.B. Temperaturdrift,<br />
Alterung, Netzspannungseinfluß, etc..<br />
Heutige digitale Spannungsmeßgeräte zeigen Fehler im Bereich <strong>von</strong> 0,1% bis 1ppm 19 . Der relative Fehler ist<br />
in einem Bereich <strong>von</strong> 10% bis 100% des MB annähernd konstant, sodaß nahezu für den gesamten MB<br />
gleiche Fehlerbedingungen gelten.<br />
Für eine genaue Spezifizierung der Meßfehler bei verschiedene Herstellern siehe auch:<br />
http://www.fluke.com/products/sections.aspAGID=6&SID=9<br />
http://www.tm.agilent.com/classes/MasterServletview=ProductandSolution&pgr-ItemID=1000000684&language=eng&locale=US<br />
4. Dynamische Meßfehler<br />
Im allgemeinen kann die Ausgangsgröße X A eines Meßgerätes der Eingangsgrößenänderung dX E nicht<br />
beliebig schnell folgen. Für die vorangegangenen Betrachtungen wurde aber da<strong>von</strong> ausgegangen, daß die<br />
zeitlichen Änderungen der Meßgröße wesentlich langsamer sind als die inneren Einschwing- oder<br />
Ausgleichsvorgänge. Ist diese Annahme nicht mehr gerechtfertigt, so muß zusätzlich zu dem bereits<br />
vorhandenen statischen Meßfehler, ein dynamischer Meßfehler ∆x(t) berücksichtigt werden.<br />
∆ x( t)<br />
= X ( t)<br />
− kX ( t)<br />
mit k als Meßkoeffizient<br />
A<br />
E<br />
Bei der Messung zeitlich veränderlicher Meßgrößen oder bei zeitlich diskontinuierlichen Messungen wird<br />
die Beziehung zwischen Ausgangs- X A und Eingangsgröße X E durch eine Differentialgleichung n-ter<br />
Ordnung beschrieben. In den meisten Fällen läßt sich das dynamische Verhalten des Meßgerätes aber einer<br />
der folgenden Kategorien zuordnen:<br />
Verzögerungsglied <strong>1.</strong> Ordnung – enthält einen Energiespeicher, z.B. Temperaturfühler, Hall<br />
Generatoren oder Bandbegrenzung im allgemeinen. Tiefpässe sind in nahezu jeder<br />
Übertragungskette enthalten, z.B. Quelle wird über ein Kabel an die nächste Eingangsstufe<br />
angekoppelt 20 .<br />
Verzögerungsglied 2. Ordnung – enthält zwei gekoppelte Energiespeicher, z.B. Drehspulmeßgerät,<br />
Operationsverstärker und harmonische Oszillatoren.<br />
Totzeitglieder – Das Ausgangssignal folgt dem Eingangssignal unverändert, aber mit einer<br />
gewissen zeitliche Verzögerung T D der Totzeit, z.B. Verzögerungsleitung oder Signallaufzeiten im<br />
Gerät im allgemeinen.<br />
Xa( t)<br />
= Xe(<br />
t − TD<br />
)<br />
19 Parts per million oder ppm<br />
20 Durch den Ausgangswiderstand der Quelle und Kapazität des Kabels wird ein Tiefpaß erster Ordnung gebildet. Die<br />
Kapazität eines Kabels wird vom Hersteller durch den Kapazitätsbelag spezifiziert, z.B. 100pF/m.<br />
C.Brunner - Elektrische Messtechnik Seite 10/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Abb. 8. Zeitlicher Zusammenhang zwischen Eingangs- X e (σ(t)) und Ausgangsgröße X a , Sprungantwort des<br />
Meßgerätes<br />
Für die oben angeführten Systeme kann die Identifizierung des Übertragungsverhaltens des Meßgerätes mit<br />
einfachsten Mitteln erfolgen. Als Eingangsgröße X e (t) wird hierbei eine Sprungfunktion σ(t) verwendet. Aus<br />
der sogenannten Sprungantwort X a (t) des Systems lassen sich die Koeffizienten der Übertragungsfunktion<br />
bestimmen.<br />
5. Fehlerfortpflanzung<br />
Als Ausgangspunkt für die Überlegungen zur Fehlerfortpflanzung soll die Ausgangsgröße X A dienen. Diese<br />
ist im folgenden nicht nur <strong>von</strong> einer Eingangsgröße X E abhängig, sondern zeigt eine Abhängigkeit <strong>von</strong> n<br />
Variablen. Es gilt also<br />
X = y = f x , x , x ,... x ) = f ( x , x , x ,... x )<br />
A<br />
(<br />
E1 E 2 E3<br />
En<br />
1 2 3 n<br />
wobei die einzelnen Eingangsvariablen X i wieder mit den Einzelfehlern ∆x i behaftet sind. Die Abhängigkeit<br />
<strong>von</strong> fehlerbehafteten Eingangsvariablen X i führt natürlich auch bei der Ausgangsgröße X A zu einem<br />
gewissen Fehler. Die Berechnung dieses Fehlers soll im folgenden versucht werden. Für die wahren Werte<br />
der Eingangsgrößen X iW gilt:<br />
x<br />
iW<br />
= x − ∆x<br />
i<br />
i<br />
Mit x i als Meßgröße und ∆x i als Meßfehler ist die Ausgangsgröße X A folgendermaßen darstellbar:<br />
X = y = f x + ∆x<br />
, x + ∆x<br />
, x + ∆x<br />
,... x + ∆x<br />
)<br />
A<br />
(<br />
1 1 2 2 3 3 n n<br />
Für die Ausgangsgröße X A gilt analog zur Eingangsgröße X E :<br />
y W<br />
=<br />
y − ∆y<br />
∆ y =<br />
y − y<br />
W<br />
=<br />
f ( x1 + ∆x1,<br />
x2<br />
+ ∆x2,<br />
x3<br />
+ ∆x3,...<br />
xn<br />
+ ∆xn)<br />
− f ( x1,<br />
x2,<br />
x3,...<br />
xn)<br />
Unter der Annahme ∆x
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Voraussetzung für die Reihenentwicklung ist, daß die Funktion in x analytisch ist, und somit im betrachteten<br />
Entwicklungspunkt x beliebig oft differenzierbar ist. Hierbei stellt x den Entwicklungs-punkt der Reihe dar<br />
und ∆x die Abweichungen vom Entwicklungspunkt 21 . Wird die Reihenentwicklung nach dem linearen Glied<br />
abgebrochen 22 und die partiellen Ableitungen nach den n Variablen berücksichtigt (X A hat n Dimensionen),<br />
so ergibt sich für ∆y:<br />
∆ y =<br />
∆y<br />
=<br />
f<br />
n<br />
∑<br />
∂f<br />
( x<strong>1.</strong>.<br />
xn)<br />
x , x2,<br />
x3,...<br />
xn)<br />
+ ∆x<br />
∂x1<br />
∂f<br />
( x<strong>1.</strong>.<br />
xn)<br />
+ ∆x<br />
∂x2<br />
∂f<br />
( x<strong>1.</strong>.<br />
xn)<br />
+ ... + ∆x<br />
∂xn<br />
( 1 1<br />
2<br />
n<br />
3 n<br />
i=<br />
1<br />
∂f<br />
( x .. x<br />
∂xn<br />
1 n)<br />
∆x<br />
n<br />
für ∆x i
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
n<br />
1<br />
∆y<br />
= ∑<br />
i=<br />
1<br />
y = a x1<br />
+ a2x2<br />
+ ... + a n<br />
x n<br />
a i<br />
⋅ ∆x i<br />
Läßt sich die Ausgangsgröße X A als Produkt der Eingangsgrößen X Ei darstellen, so addieren sich die<br />
relativen Fehler ∆x i /x i .<br />
n<br />
1<br />
x1<br />
⋅ a2x2<br />
⋅ ⋅ a n<br />
x n<br />
n<br />
= ∑<br />
y i=<br />
1<br />
y = a ...<br />
∆y<br />
∆xi<br />
x<br />
i<br />
6. Statistische Abweichungen<br />
Kennzeichnend für die statistischen Abweichungen ist, daß für wiederholende Messungen ein und derselben<br />
Meßgröße X E unterschiedlich streuende Meßwerte X A auftreten. Für die Berechnung der statistischen<br />
Kenngrößen wird <strong>von</strong> einer Zufallsgröße X ausgegangen. Diese Zufallsgröße X kann durch mehrere<br />
Realisierungen x i dargestellt werden, die die aktuellen Einzelmessungen der Meßserie repräsentieren. Die<br />
Verteilung der Realisierungen x i kann durch zwei Parameter, den Erwartungswert µ und die<br />
Standardabweichung σ, vollständig beschrieben werden. Dieser Ansatz geht da<strong>von</strong> aus, daß für die<br />
Realisierung der Zufallsgröße X beliebig viele Realisierungen x i vorhanden sind, somit die Anzahl N der<br />
Realisierungen <strong>von</strong> x i gegen ∞ geht (N→∞).<br />
Dies ist bei einer reale Meßserie natürlich nicht gegeben. Es können daher für den Erwartungswert µ und<br />
die Standardabweichung σ nur Schätzwerte angegeben werden, die für eine steigende Anzahl N der<br />
Realisierungen beliebig nahe an die wahren Werte kommen können. Der Schätzwert für µ errechnet sich aus<br />
dem arithmetischen Mittelwert x der Realisierungen x i . Unter Zugrundelegung eines bestimmten<br />
Verteilungstyps 23 der Realisierungen kann ein Intervall um den Mittelwert x definiert werden, welches mit<br />
einer gewissen Wahrscheinlichkeit, dem so genannten Vertrauensniveau 24 (1-α), den Erwartungswert µ<br />
einschließt. Dieses Intervall wird auch als Konfidenzintervall bezeichnet.<br />
<strong>1.</strong>4. Grundlagen der Statistik<br />
Ausgangspunkt für die statistischen Betrachtungen sei eine Zufallsvariable X, deren Realisierungen x i durch<br />
die Einzelmessungen X Ai dargestellt werden können. Die einzelnen Realisierungen x i werden zufällige<br />
Abweichungen ∆x vom wahren Wert der Meßgröße X W zeigen, sie werden um den wahren Wert X W streuen.<br />
x = X + ∆x<br />
mit ∆x als Streuung der Meßwerte um den wahren Wert X W<br />
i<br />
W<br />
Aufgrund der Unsicherheit oder Streuung der Meßergebnisses und damit der Realisierungen x i ergibt sich<br />
eine Häufigkeitsverteilung der Meßergebnisse. Unter der Annahme, daß genügend (theoretisch unendlich<br />
viele) Einzelmessungen oder Realisierungen x i vorliegen, kann die Wahrscheinlichkeit p(x) für das Auftreten<br />
eines bestimmten Wertes <strong>von</strong> x i über X aufgetragen werden. Wirken viele <strong>von</strong>einander unabhängige, gleich<br />
verteilte (rein zufällige) Einflußgrößen auf die Messung ein, so liegt eine Normalverteilung 25 oder<br />
Gaußverteilung vor.<br />
23 In den meisten praktische Fällen kann immer mit der Gauß’schen Normalverteilung gerechnet werden. Neben der<br />
Normalverteilung sind auch noch Binominal- und Poissonverteilung gebräuchlich.<br />
24 Im allgemeinen wird mit einem Vertrauensniveau <strong>von</strong> 95% gearbeitet.<br />
25 Die große praktische Relevanz der Gaußverteilung wird durch den zentralen Grenzwertsatz erklärt. Wird eine<br />
physikalische Größe als Resultierende mehrere Einflußgrößen betrachtet und kann diese somit als Linearkombination<br />
mehrerer Zufallsvariablen geschrieben werden so gilt:<br />
C.Brunner - Elektrische Messtechnik Seite 13/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Abb. 9. Gaußsche Verteilungsfunktion für die Zufallsvariable x<br />
Die Wahrscheinlichkeitsdichtefunktion p(x) für die Normalverteilung kann folgendermaßen beschrieben<br />
werden:<br />
2<br />
1 ⎞<br />
⎜<br />
⎛ x−µ<br />
− ⋅ ⎟<br />
2 ⎝ σ ⎠<br />
1<br />
p ( x)<br />
= ⋅e<br />
mit µ als Erwartungswert und σ als Standardabweichung.<br />
σ 2π<br />
Wie aus der Verteilung ersichtlich ist, treten negative und positive Abweichungen gleich häufig oder<br />
wahrscheinlich auf, und die Wahrscheinlichkeit für deren Auftreten geht mit steigenden Abstand vom<br />
Erwartungswert µ rasch gegen Null. Als wichtige Kenngrößen in Zusammenhang mit der<br />
Standardabweichung σ gilt, daß 68% aller Werte innerhalb einer Intervalles <strong>von</strong> +/- σ um den<br />
Erwartungswert µ liegen (99,7% innerhalb +/- 3σ).<br />
Soll die Wahrscheinlichkeit für das Auftreten eines Wertes x i innerhalb eines Intervalls x 1 < x i < x 2 berechnet<br />
werden, so erfolgt dies über die Integration der Wahrscheinlichkeitsdichtefunktion p(x).<br />
P =<br />
x 2<br />
∫<br />
x1<br />
p(<br />
x)<br />
dx =<br />
1<br />
σ 2π<br />
x 2<br />
∫<br />
x1<br />
⋅e<br />
x ⎞<br />
⎜<br />
⎛ 2<br />
1 −µ<br />
− ⋅ ⎟<br />
2 ⎝ σ ⎠<br />
dx =<br />
1<br />
σ 2π<br />
x 2<br />
∫<br />
0<br />
⋅e<br />
x ⎞<br />
⎜<br />
⎛ 2<br />
1 −µ<br />
− ⋅ ⎟<br />
2 ⎝ σ ⎠<br />
1<br />
dx −<br />
σ 2π<br />
x1<br />
∫<br />
0<br />
⋅e<br />
x ⎞<br />
⎜<br />
⎛ 2<br />
1 −µ<br />
− ⋅ ⎟<br />
2 ⎝ σ ⎠<br />
dx<br />
Da das Integral einer analytischen Lösung nicht zugänglich ist, kann die Lösung nur über die tabellierte<br />
error function erf(x) erfolgen. Diese kann im entsprechenden Tabellenwerk nachgeschlagen werden.<br />
Die Normalverteilung wird durch die beiden Größen Erwartungswertes µ und Standard-abweichung σ<br />
vollständig beschrieben. Der Erwartungswert µ berechnet sich hierbei zum arithmetischen Mittelwert aller<br />
Einzelwerte x i und ist auch mit dem gesuchten wahren Wert der Meßgröße x w identisch.<br />
Z<br />
n<br />
=<br />
N<br />
∑<br />
n=<br />
1<br />
an<br />
⋅ Xn<br />
Der zentrale Grenzwertsatz besagt jetzt, daß für N → ∞ die Zufallsvariable Z n Gausverteilt wird. Voraussetzung hierfür<br />
ist lediglich, daß keiner der Prozesse vorherrschend ist, die statistische Unabhängigkeit der einzelnen Zufallsvariablen<br />
gewährleistet ist und die Endlichkeit ihrer Varianz.<br />
C.Brunner - Elektrische Messtechnik Seite 14/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
x<br />
w<br />
=<br />
µ = lim ∑ xi<br />
für praktische Anwendungen gilt: xˆ<br />
= ∑<br />
N →∞<br />
1<br />
N<br />
N<br />
i=<br />
1<br />
Für den Erwartungswert µ gilt, daß die Summe aller linearen Abweichungen (x i - µ) Null ergibt und die<br />
Summe aller quadratischen Abweichungen (x i - µ) 2 ein Minimum ist.<br />
N<br />
∑<br />
i=<br />
1<br />
2<br />
( x i − µ ) = 0<br />
( xi − µ ) = Min<br />
N<br />
∑<br />
i=1<br />
1<br />
N<br />
N<br />
i=<br />
1<br />
xi<br />
Für praktische Anwendungen stehen natürlich nur endliche viele Meßwerte zur Verfügung es kann der<br />
Erwartungswert µ daher nur geschätzt werden, dieser Schätzwert wird mit xˆ bezeichnet. Als Maß für die<br />
Abweichungen der Einzelwerte x i vom Erwartungswert µ wird die Standard-abweichung σ oder deren<br />
Quadrat σ 2 , die Varianz 26 , verwendet.<br />
1<br />
N<br />
2<br />
σ = lim ∑(<br />
xi<br />
− µ ) für praktische Anwendungen gilt:<br />
N→∞<br />
N i=<br />
1<br />
s =<br />
1 N<br />
∑(<br />
N −1<br />
i=<br />
1<br />
− ˆ)<br />
xi x<br />
2<br />
Stehen nur endlich viele Messungen zur Verfügung, so können für Standardabweichung σ und Varianz σ 2<br />
wieder nur Schätzwerte angegeben werden. Diese werden als Schwankung s oder mittlerer quadratischer<br />
Fehler und Streuung s 2 bezeichnet. Bei wiederholenden Messungen ist darauf zu achten, daß diese unter<br />
möglichst unveränderten Randbedingungen und natürlich mit denselben Mitteln durchgeführt werden.<br />
Ähnlich der Fehlerfortpflanzung bei systematischen Fehlern tritt auch bei statistischen Größen eine<br />
Fehlerfortpflanzung auf. Der resultierende Gesamtfehler wird durch das Gauß’sche<br />
Fehlerfortpflanzungsgesetz beschrieben, auf dessen Ableitung hier verzichtet werden soll. Die resultierende<br />
Standardabweichung σ y wird ähnlich, dem bereits bekannten Fehlerfort-pflanzungsgesetz bei systematischen<br />
Fehlern, aus der geometrischen Summe der Standardabweichungen der Einzelgrößen σ i bestimmt:<br />
N<br />
2<br />
2 ⎛ ∂f<br />
( x1 , x2,...<br />
xn)<br />
⎞ 2<br />
σy<br />
= ∑⎜<br />
⎟ ⋅σi<br />
i=<br />
1 dxi<br />
⎝<br />
⎠<br />
oder<br />
s<br />
2<br />
y<br />
N<br />
⎛ ∂f<br />
( x x<br />
= ∑⎜<br />
i=<br />
1 ⎝ dxi<br />
1 , 2,...<br />
n)<br />
x<br />
2<br />
⎞<br />
⎟<br />
⎠<br />
⋅ s<br />
2<br />
i<br />
Ein einfaches Beispiel soll dies illustrieren. Es soll der mittlere quadratische Fehler s der<br />
Serienschaltung zweier Widerstände bestimmt werden. Aus dem Fertigungsprozeß ist bekannt, daß<br />
die Widerstände Toleranzen <strong>von</strong> 5% aufweisen.<br />
R 1 = 220E 5% s 1 = 11 R 2 = 470E 5% s 2 = 23,5<br />
R ges = R 1 + R 2<br />
26 Werden die Größen Erwartungswert und Varianz auf stochastische Signale angewandt, so entspricht die Größe des<br />
Erwartungswertes µ x dem Gleichanteil des Signals x(t). Die Standardabweichung σ x stellt den Effektivwert des<br />
Wechselanteils dar. Unter der Voraussetzung einer Normalverteilung der Signalamplituden läßt sich somit eine<br />
Aussage über die Wahrscheinlichkeitsdichtefunktion p(x) des Signals treffen. Der Effektivwert ρ x des Signales läßt<br />
sich somit folgendermaßen berechnen:<br />
2<br />
2<br />
ρ x = µ x +<br />
σ<br />
2<br />
x<br />
C.Brunner - Elektrische Messtechnik Seite 15/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Die Schwankung s ist hier durch den relativen Fehler des Produktionsprozesses gegeben und<br />
errechnet sich aus dem relativen Fehler bezogen auf den Wert des Widerstandes.<br />
2<br />
2<br />
2<br />
N<br />
2 ⎛ ∂Rges<br />
⎞ 2<br />
∂Rges<br />
2 ∂Rges<br />
2 2 2 2 2<br />
sges = ∑⎜<br />
⎟ ⋅ si<br />
= ⋅ s1<br />
+ ⋅ s2<br />
= 1 ⋅11<br />
+ 1 ⋅ 23,5 = 673,25 s = 25,947<br />
i=<br />
1 ⎝ dxi<br />
⎠ ∂R1<br />
∂R2<br />
Der Gesamtwiderstand R = 690 +/- 25,9 Ω oder 690 Ω +/- 3,76%<br />
Wie zu erwarten war ist der mittlere quadratische Fehler der Serienschaltung geringer als der<br />
systematische Fehler der Serienschaltung (dieser wäre wieder 5%).<br />
***<br />
Aus der laufenden Fertigung eines Widerstandes mit dem Normwert 100E werden 20 Stichproben<br />
genommen. Es sollen die Schätzwerte für den Erwartungswert µ und der Standardabweichung σ berechnet<br />
werden. Weiters soll die Häufigkeitsverteilung angegeben werden.<br />
C.Brunner - Elektrische Messtechnik Seite 16/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Stichproben dX sqr(dX) Klassifizierung Klasse Häufigkeit<br />
99,48 -0,49 0,237 99,5 99,3 2<br />
100,06 0,09 0,009 100,1 99,4 0<br />
100,27 0,30 0,092 100,3 99,5 1<br />
100,09 0,12 0,015 100,1 99,6 0<br />
100,10 0,13 0,018 100,1 99,7 0<br />
99,87 -0,10 0,009 99,9 99,8 2<br />
99,34 -0,63 0,393 99,3 99,9 1<br />
100,30 0,33 0,111 100,3 100 8<br />
100,40 0,43 0,187 100,4 100,1 6<br />
100,02 0,05 0,003 100,0 100,2 0<br />
99,91 -0,06 0,003 100,0 100,3 2<br />
99,77 -0,20 0,039 99,8 100,4 1<br />
100,01 0,04 0,002 100,0 100,5 1<br />
99,80 -0,17 0,028 99,8 100,6 1<br />
100,13 0,16 0,027 100,1 100,7 0<br />
99,64 -0,33 0,107 100,0<br />
99,82 -0,15 0,022 100,0 25<br />
100,01 0,04 0,002 100,0<br />
100,07 0,10 0,011 100,1<br />
Häufigkeitsverteilung H<br />
99,58 -0,39 0,150 100,0<br />
100,48 0,51 0,263 100,5<br />
10<br />
99,33 -0,64 0,406 99,3<br />
9<br />
100,63 0,66 0,439 100,6<br />
8<br />
100,13 0,16 0,027 100,1<br />
99,94 -0,03 0,001 100,0<br />
7<br />
6<br />
2499,18 2,599<br />
99,97 0,108<br />
5<br />
4<br />
Schätzwert für Erwartungswert x: 99,967<br />
3<br />
Schätzwert für Varianz s2: 0,108<br />
Schätzwert für Standardabweichung s: 0,329<br />
2<br />
Absolute Häufigkeit / Klasse<br />
1<br />
Häufigkeit<br />
0<br />
99,3 99,5 99,7 99,9 100,1 100,3 100,5 100,7<br />
Klasse<br />
***<br />
2. Meßbrücken<br />
Allen Ausschlagsverfahren gemeinsam ist die notwendige Belastung der Meßgröße (oder des zu<br />
beobachtenden Prozesses) durch die Bürde 27 des Meßgerätes. Moderne elektronische Meßgeräte mit<br />
Innenwiderständen R i >> 1MΩ kommen dem Ideal eines unbelasteten Meßobjekts schon sehr nahe, doch<br />
wird stets eine nicht verschwindende Belastung und somit auch Rückwirkung auf den Meßprozeß vorhanden<br />
sein.<br />
Ein vom Ansatzpunkt gänzlich verschiedenes Meßprinzip verfolgen die im nächsten Abschnitt vorgestellten<br />
Meßbrücken. Bei diesem Meßprinzip wird die Beeinflussung des Meßprozesses zufolge der endlichen<br />
27 Als Bürde wird allgemein die Rückwirkung des Meßvorganges auf den zu messenden Prozeß verstanden. Der für die<br />
Erfassung der Meßgröße dienende Fühler beeinflußt in mehr oder weniger starker Weise den Prozeß. Die resultierende<br />
Fehlanzeige ist somit <strong>von</strong> der gegebenen äußeren Belastung durch das Meßgerät, der Bürde, abhängig.<br />
C.Brunner - Elektrische Messtechnik Seite 17/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Innenimpedanz Z i des Meßgerätes vollständig eliminiert. Dies wird dadurch erreicht, daß der zu messenden<br />
physikalischen Größe eine gleichartige und ihrem Betrag nach gleiche Größe gegenübergestellt wird.<br />
Hieraus leitet sich auch der Name Kompensationsmeßmethode 28 ab. Der „Zustand der Gleichheit“ der<br />
beiden gegenübergestellten Größen wird mit sogenannten Nulldetektoren bestimmt. Wie der Name<br />
Nulldetektor bereits nahelegt, wird die Detektion des „Zustand der Gleichheit“ leistungslos, also ohne<br />
jeglichen Energiefluß vom Meßobjekt oder Prozeß zum Meßgerät realisiert.<br />
Die Kompensationsmeßmethoden sind prinzipiell mit mehr oder weniger großem Aufwand für alle<br />
physikalischen Größen anwendbar. Im weiteren sollen aber ausschließlich Methoden zur Strom- und<br />
Spannungskompensation vorgestellt werden.<br />
Abb. <strong>1.</strong> Spannungs- und Stromkompensation mittels Spannungs- und Stromquellen<br />
Entsprechend dem Kompensationsprinzip werden den unbekannten Größen U x und I x , bekannte Größen U h<br />
und I h gegenübergestellt und deren absolute Größe solange variiert, bis der Ausschlag am Galvanometer Null<br />
erreicht. Als Anzeigeinstrumente wurden klassischerweise Zeigerinstrumente verwendet, deren Nullposition<br />
in Skalenmitte ist und deren Empfindlichkeit im Nullpunkt ein Maximum erreicht. Es werden keinerlei<br />
Forderungen an die Linearität und Genauigkeit des Nullinstruments gestellt. Im abgeglichenen Zustand<br />
werden durch den Innenwiderstand R i der Spannungsquelle, bzw. den Innenleitwert G i der Stromquelle<br />
keinerlei Fehler verursacht, da U h stromlos und I h spannungslos ist – die Quellen sind somit leistungslos.<br />
Die Kompensationsschaltungen werden allgemein als Vorstufe zu den, im zweiten Teil diese Kapitels<br />
besprochenen, Brückenschaltungen betrachtet und sollen deshalb kurz vorgestellt werden.<br />
2.<strong>1.</strong> Gleichgrößenkompensation<br />
Die vollständige Kompensation wird im allgemeinen nicht durch Variation der Hilfsenergiequelle U h oder I h<br />
erreicht, sondern durch Teilung oder Anpassung der konstanten Hilfsenergie an die unbekannte Größe ( z.B.<br />
über Widerstandsteiler). Aus dem Teilungsverhältnis im abgeglichenen Zustand läßt sich auf die unbekannte<br />
Größe rückschließen.<br />
<strong>1.</strong> Gleichspannungskompensation<br />
Nachfolgende Abbildung zeigt des Kompensationsprinzip für Gleichspannung. Es wird der<br />
Widerstandsabgriff R an R 0 so lange variiert bis U h = U x gilt und das Galvanometer hiermit stromlos wird.<br />
28 Neben der vollständigen Kompensation der Meßgrößen findet im Zusammenhang mit Meßbrücken auch noch die<br />
Teilkompensation Anwendung. Hier wird die unbekannte Größe nur teilweise durch Gegenüberstellung einer<br />
konstanten Größe kompensiert, der verbleibende Differenzbetrag kann aber mit größerer Auflösung bestimmt werden.<br />
Überdies werden Drift und andere Störeinflüsse ebenfalls teilweise kompensiert. Die Teilkompensation ist natürlich<br />
nicht mehr leistungslos.<br />
C.Brunner - Elektrische Messtechnik Seite 18/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Abb. 2. Spannungskompensation mittels Spannungsquelle und verstellbarem Widerstandsteiler<br />
Sind die Größen U h der Spannungsquelle und das Widerstandsteilerverhältnis R/R 0 bekannt, so kann die<br />
unbekannte Größe U x ohne Fehler berechnet werden, das Galvanometer ist ja stromloß und zeigt daher auch<br />
bei endlichem Innenwiderstand R m keinen Spannungsabfall.<br />
R<br />
Ux<br />
= Uk<br />
= Uh<br />
⋅<br />
R +<br />
= U ⋅<br />
R<br />
h<br />
( R0 − R)<br />
R0<br />
Die vollständige Gleichspannungskompensation wird vor allem bei Präzisionmessungen mit<br />
Spannungsnormalen angewandt. Obige Schaltung ist nur für U x < U h geeignet, für U x > U h wird der<br />
Widerstandsteiler auf der Seite der unbekannten Größe U x eingeschalten, die Messung erfolgt dann aber<br />
nicht mehr leistungslos.<br />
Praktisch ist die Gleichspannungskompensation durch den Einsatz <strong>von</strong> hochohmigen Meßverstärkern (R i >><br />
1MΩ) weitgehend verdrängt worden.<br />
2. Gleichstromkompensation<br />
Nachfolgende Schaltung führt die Stromkompensation wieder auf eine Spannungskompensation zurück. Der<br />
durch I x an R 1 erzeugte Spannungsabfall wird durch einen gleich großen entgegengesetzten Spannungsabfall<br />
an R kompensiert. Hierdurch wird der Spannungsabfall am Galvanometer für die Masche R m -R-R 1 zu Null.<br />
Der abgeglichen Zustand wird wieder durch Variation des Widerstandsteilerverhältnisses R/R 0 erreicht.<br />
Abb. 3. Stromkompensation mittels Spannungsquelle und verstellbarem Widerstandsteiler<br />
Mit positivem Umlaufsinn in der Masche R m -R-R 1 gilt:<br />
C.Brunner - Elektrische Messtechnik Seite 19/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
−Ug − ( Ih<br />
− Ix)<br />
R + IxR1 = 0 oder mit U g = 0<br />
I<br />
I<br />
h = x ⋅<br />
R + R<br />
R<br />
1<br />
Gl.1<br />
Für die äußere Masche mit der Hilfsspannungsquelle gilt:<br />
( I h − Ix)<br />
R + Ih(<br />
R0 − R)<br />
−Uh<br />
= 0<br />
oder Ih R0<br />
= Uh<br />
+ IxR<br />
Gl.2<br />
Nach Einsetzten <strong>von</strong> Gl.1 in Gl.2 kann I x direkt bestimmt werden:<br />
R<br />
Ix<br />
= Uh<br />
⋅<br />
2<br />
R0 ⋅( R1<br />
+ R)<br />
− R<br />
Als Nulldetektoren werden in der Praxis hochempfindliche Galvanometer (bis 100nV) oder<br />
Spannungsverstärker mit sehr geringer Offsetspannung verwendet.<br />
2.2. Widerstandsmeßbrücken<br />
Beim Betrieb <strong>von</strong> Meßbrücken unterscheidet man je nach Systematik der Anwendung zwischen<br />
Ausschlagsverfahren, bei denen die Brückendiagonalspannung mit hochohmigen Meßverstärkern gemessen<br />
wird, und Abgleich- oder Nullverfahren. Bei letzteren wird die Brückendiagonal-spannung durch Variation<br />
eines Brückenzweiges zu Null abgeglichen, und diese entsprechen somit den obigen<br />
Kompensationsverfahren. Durch Parallelschaltung zweier Widerstandsteiler an einer gemeinsamen<br />
Speisespannung U o entsteht die einfachste aller Brückenschaltung.<br />
Diese erstmals <strong>von</strong> Wheatstone 1834 zur Messung <strong>von</strong> Widerstandswerten eingesetzte Brückenschaltung<br />
wird dem entsprechend auch Wheatstone Brücke genannt. Sie wird zur Bestimmung <strong>von</strong> ohmschen<br />
Widerständen eingesetzt. Für das Folgende sei R x = R 2 der zu bestimmende Widerstand.<br />
Abb. 4. Widerstandsmeßbrücke nach Wheatsstone<br />
Die Diagonalspannung der Brücke berechnet sich aus der Differenz der Teilspannungen U R2 und U R4 der<br />
beiden Spannungsteiler R 1 -R 2 und R 3 -R 4 .<br />
und damit zu<br />
R<br />
R + R<br />
2<br />
UR 2 = U 0 ⋅<br />
und<br />
1 2<br />
UR 4<br />
= U<br />
0<br />
R4<br />
⋅<br />
R3<br />
+ R<br />
4<br />
C.Brunner - Elektrische Messtechnik Seite 20/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Ud<br />
⎛ R2<br />
= U 0 ⋅⎜<br />
⎝ R1<br />
+ R2<br />
R4<br />
⎞<br />
− ⎟ = U ⋅<br />
R3<br />
+ R4<br />
⎠<br />
R2R3<br />
− R1R4<br />
R + R2)<br />
⋅(<br />
R3<br />
+ R )<br />
0<br />
( 1<br />
4<br />
Daraus ergibt sich für die Abgleichbedingung U d = 0 der Brücke zu<br />
0 R R R R<br />
Ud = = 2 3 − 1 4 und somit<br />
Rx<br />
= R<br />
2<br />
R<br />
= R1⋅<br />
R<br />
4<br />
3<br />
Eine wichtige Größe für die Abgleichbarkeit <strong>von</strong> Meßbrücken ist die Empfindlichkeit ε im Abgleichspunkt.<br />
Als Empfindlichkeit ε soll die Änderung der Brückendiagonalspannung U d bei Veränderung des<br />
unbekannten Widerstandes R x verstanden werden.<br />
∆Ud<br />
∆Rx<br />
ε = mit δ Rx<br />
= als relative Widerstandsänderung.<br />
δRx<br />
Rx<br />
Die Empfindlichkeit ε erreicht ein Maximum 29 , wenn die Brücke so dimensioniert wird, daß im Abgleich gilt<br />
R x = R 2 = R 1 . Die Spannung U o sollte sich also auf den oberen und unteren Brückenwiderstand gleich<br />
aufteilen.<br />
Als einfaches Anwendungsbeispiel für den Einsatz einer Widerstandsmeßbrücke bietet sich die<br />
Temperaturmessung über PT 1000 Temperaturfühler an.<br />
Abb. 5. Widerstandsmeßbrücke mit PT 1000 und Differenzverstärker für die Temperaturmessung<br />
Als Betriebsspannung der Brücke sollen 5V dc angenommen werden. Aus dem Ansatz für die<br />
Brückendiagonalspannung ergibt sich für den Fall R 1 = R 2 = R 3 = 1kΩ.<br />
⎛ 1 RPT<br />
1000 ⎞<br />
U d = U 0 ⋅⎜<br />
− ⎟ mit R PT1000 in kΩ<br />
⎝ 2 1+<br />
RPT<br />
1000 ⎠<br />
29 Neben der Spannungsempfindlichkeit ε ist für die Genauigkeit des Abgleichs natürlich noch die Empfindlichkeit des<br />
Nullinstruments <strong>von</strong> Bedeutung.<br />
C.Brunner - Elektrische Messtechnik Seite 21/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Temp Res PT 1000 U PT1000 Ud Ua<br />
-40 842,7 2,287 0,21 -2,13<br />
-30 882,2 2,344 0,16 -1,56<br />
-20 921,6 2,398 0,10 -1,02<br />
-10 960,9 2,450 0,05 -0,50<br />
0 1000,0 2,500 0,00 0,00<br />
10 1039,0 2,548 -0,05 0,48<br />
20 1077,9 2,594 -0,09 0,94<br />
30 1116,7 2,638 -0,14 1,38<br />
40 1155,4 2,680 -0,18 1,80<br />
50 1194,0 2,721 -0,22 2,21<br />
60 1232,4 2,760 -0,26 2,60<br />
70 1270,7 2,798 -0,30 2,98<br />
80 1308,9 2,834 -0,33 3,34<br />
90 1347,0 2,870 -0,37 3,70<br />
100 1385,0 2,904 -0,40 4,04<br />
110 1422,9 2,936 -0,44 4,36<br />
120 1460,6 2,968 -0,47 4,68<br />
130 1498,2 2,999 -0,50 4,99<br />
140 1535,8 3,028 -0,53 5,28<br />
Ausgang [V]<br />
5,00<br />
4,00<br />
3,00<br />
2,00<br />
1,00<br />
0,00<br />
-1,00<br />
-2,00<br />
Ausgangsspannung Ua<br />
Ua<br />
-3,00<br />
-40 -20 0 20 40 60 80 100 120 140<br />
Temperatur [C]<br />
Für den temperaturabhängigen Widerstandswert des PT 1000 Elementes gilt:<br />
−3<br />
−6<br />
2<br />
R = R0 ⋅(1<br />
+ 3,908⋅10<br />
⋅ϑ<br />
− 0,5802⋅10<br />
⋅ϑ<br />
−....)<br />
mit R o = 1kΩ und ϑ in °C<br />
ϑ<br />
Wie aus der U a /T Kennlinie ersichtlich ist, würden bei der Temperaturmessung über die PT 1000 Meßbrücke<br />
starke Nicht-Linearitäten auftreten. Diese Nicht-Linearitäten sind jedoch nicht durch das PT 1000 Element<br />
bedingt sondern resultieren aus der Änderung des Brückenquerstromes im Zweig des PT 1000 Elementes.<br />
Ändert sich die Temperatur ändert sich auch der Widerstand des PT 1000 Elementes und somit auch der<br />
Längswiderstand des linken Brückenzweiges. Mit der Änderung des Längswiderstandes ändert sich auch der<br />
Querstrom und bedingt hierdurch die Nicht- Linearität. Diese müssen für eine praktische Realisierung<br />
kompensiert werden.<br />
Eine einfache Möglichkeit die Nicht- Linearitäten zu umgehen besteht darin die Brückenzweige mit<br />
Konstantstrom zu betreiben. Hierfür werden die beiden oberen Brückenelemente durch<br />
Konstantstromquellen ersetzt.<br />
<br />
Durch den Einbau des PT 1000 in eine Brückenanordnung wird die Meßanordnung unabhängig <strong>von</strong><br />
Versorgungsspannungsschwankungen, da diese beide Brückenzweige betrifft und sich die Drifts gegenseitig<br />
kompensieren.<br />
Weiters sollte die Eigenerwärmung des Pt 1000 Elements zufolge des Querstromes der Meßbrücke<br />
berücksichtigt werden (P v ~ 6mW).<br />
Die PT 1000 Brücke wird durch den nachfolgenden Differenzverstärker belastet. Für Präzision- messungen<br />
empfiehlt es sich den Differenzverstärker durch einen Instrumentation-Verstärker zu ersetzten (siehe Kapitel<br />
Operationsverstärker).<br />
***<br />
C.Brunner - Elektrische Messtechnik Seite 22/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Neben Platinelementen (PT 100 , PT 1000 ) können auch noch Heißleiter NTC 30 oder Kaltleiter PTC zur<br />
Temperaturmessung eingesetzt werden. Diese zeigen wesentlich stärkere Nicht-Linearitäten, sind aber<br />
preisgünstiger.<br />
Ein anderer wichtiger Anwendungsfall <strong>von</strong> Gleichstrommeßbrücken ist die Messung <strong>von</strong> Kraft oder<br />
Beschleunigung über Dehnungsmesstreifen. Hier werden in die vier Brückenzweige Dehnungsmess-streifen<br />
geschalten und am Meßobjekt physikalisch im Quadrat angeordnet. Hierdurch kann der Temperatureinfluß<br />
weitestgehend kompensiert werden.<br />
Für die Messung sehr kleiner Widerstandswerte (R x
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Die Abgleichbedingung kann <strong>von</strong> der schon bekannten Abgleichbedingung für Gleichstrommeß-brücken<br />
einfach hergeleitet werden, die Beziehung muß nur auf Impedanzen umgeschrieben werden. Für<br />
Gleichstrommeßbrücken gilt:<br />
R<br />
2 R3<br />
= R1⋅<br />
R4<br />
⋅ und somit: Z 2 ⋅ Z 3 = Z1⋅<br />
Z 4<br />
Die Abgleichbedingung muß sowohl für den Betrag als auch die Phasenlage erfüllt sein. Das bedeutet aber<br />
auch, daß sie für Real- und Imaginärteil erfüllt sein muß. Wird Z als R + jX angesetzt, so ergeben sich<br />
folgende Bedingungen für den Abgleich der Brücke:<br />
aus dem Realteil: R2 ⋅ R3<br />
− X 2 ⋅ X 3 = R1⋅<br />
R4<br />
− X 1⋅<br />
X 4<br />
aus dem Imaginärteil: R3⋅<br />
X 2 + R2<br />
⋅ X 3 = R4<br />
⋅ X 1 + R1⋅<br />
X 4<br />
Da für den Brückenabgleich zwei Bedingungen zu erfüllen sind, müssen auch zwei unabhängig <strong>von</strong>einander<br />
verstellbare Abgleichelemente vorhanden sein. Diese werden meistens als variable Kapazitäten oder<br />
Widerstände ausgeführt. Als Beispiele sollen im weiteren je eine Meßbrücke für die Kapazitäts- und<br />
Induktivitätsmessung vorgestellt werden.<br />
<strong>1.</strong> Wien Brücke<br />
Die Meßbrücke nach Wien wird für die Kapazitätsbestimmung eingesetzt. Über die Wien Brücke kann<br />
nicht nur die Kapazität, sondern auch der Serien- oder Parallelersatzwiderstand der unbekannten Kapazität<br />
bestimmt werden. Die Brücke kann in zwei Modifikationen aufgebaut werden, je nachdem, ob der Serienoder<br />
Parallelersatzwiderstand der Kapazität ermittelt werden soll. Da im allgemeinen für Kapazitäten das<br />
Parallelersatzschaltbild Verwendung findet, soll diese Modifikation im folgenden besprochen werden.<br />
Abb. 7. Wien Brücke zur Messung <strong>von</strong> Kapazität und Parallelersatzwiderstand<br />
Aus der Abgleichbedingung für die Brückenimpedanzen Z 1 ... Z 4 ergibt sich:<br />
R2<br />
⋅ R3<br />
Rx<br />
⋅ R<br />
=<br />
1+<br />
jω C 2R2<br />
1+<br />
jω<br />
4<br />
CxRx<br />
Nach dem getrennten Gleichsetzten <strong>von</strong> Real- und Imaginärteil ergibt sich für den Parallelwiderstand R p und<br />
die verlustlose Kapazität C x :<br />
C.Brunner - Elektrische Messtechnik Seite 24/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Rxp<br />
R3<br />
= R2<br />
⋅<br />
R4<br />
Cx<br />
R4<br />
= C 2 ⋅<br />
R3<br />
Der Verlustwinkel des Kondensators errechnet sich hiermit zu:<br />
tan δ =<br />
1<br />
ωRxpCx<br />
Über die Bestimmung <strong>von</strong> Kapazitäten hinausgehend wird die Wienbrücke in Zusammenhang mit<br />
kapazitiven Sensoren eingesetzt. Hier wird die Sensorkapazität jedoch nicht kompensiert sondert die Brücke<br />
wird als Ausschlagsbrücke betrieben (z.B. Messung der Luftfeuchte 33 , Gassensoren).<br />
2. Maxwell-Wien Brücke<br />
Die klassische Meßbrücke zur Bestimmung <strong>von</strong> Induktivitäten nach Maxwell verwendet ein<br />
Induktivitätsnormal als Vergleichselement. Da dieses im allgemeinen schwer herzustellen ist wird oft die<br />
Brücke nach Maxwell-Wien eingesetzt. Diese Brückenanordnung arbeitet mit einer variablen Kapazität<br />
analog zur Wien Brücke.<br />
Abb. 8. Maxwell-Wien Brücke zur Messung <strong>von</strong> Induktivität und Serienersatzwiderstand<br />
Aus der Abgleichbedingung für die Brückenimpedanzen Z 1 ... Z 4 ergibt sich:<br />
R4<br />
R2<br />
⋅ R3<br />
= ( Rxs + jωLxs)<br />
⋅<br />
1+<br />
jωC<br />
4R4<br />
Nach dem getrennten Gleichsetzten <strong>von</strong> Real- und Imaginärteil ergibt sich für den Serienersatz-widerstand<br />
R s und die verlustlose Induktivität L x :<br />
Rxs<br />
R<br />
R<br />
3<br />
= R2<br />
⋅<br />
Lx = C 4 ⋅ R2<br />
⋅ R3<br />
4<br />
Der Verlustwinkel der Induktivität errechnet sich hiermit zu:<br />
tan δ =<br />
Rxs<br />
ωL<br />
x<br />
33 Die Luftfeuchte wird über die Veränderung der Dielektrizitätskonstante und damit der Kapazität, bei Eintritt <strong>von</strong><br />
Wasser in das Dielektrikum eines Plattenkondensators bestimmt. Die Sensorkapazität ist mit einer porösen Elektrode<br />
aufgebaut, sodaß die in der Umgebungsluft enthaltenen Luftfeuchte ins Dielektrikum eindringen kann. Die<br />
Dielektrizitätskonstante <strong>von</strong> Wasser ist mit ε r = 81, viel größer als die der meisten anderen Stoffe.<br />
C.Brunner - Elektrische Messtechnik Seite 25/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
Die immer steigende Leistungsfähigkeit elektronischer Meßgeräte (R i >> 1MΩ) und die Fortschritte der<br />
digitalen Meßtechnik haben Brückenschaltungen mit vollständiger Kompensation immer mehr in den<br />
Hintergrund gedrängt. Meßverfahren mit Teilkompensation (Ausschlagsbrücken) haben hingegen an<br />
Bedeutung gewonnen, da hier Störeinflüsse und Drifterscheinungen vom Prinzip her schon teilweise<br />
kompensiert werden können (z.B. Temperaturmessung in Wheatstone Brücke mit PT 100 Element oder Kraft<br />
und Beschleunigungsmessung mit Dehnungsmeßstreifen).<br />
C.Brunner - Elektrische Messtechnik Seite 26/27
Kenngrößen, Statistik und Meßbrücken Kapitel 5/8<br />
http://www.pegasus-sys.net/FheServices.htm<br />
3. Literatur:<br />
/1/ H. Weinrichter, F. Hlawatsch, Stochastische Grundlagen nachrichtentechnischer Signale, Springer<br />
Verlag, Wien 1991<br />
/2/ I.N. Bronstein, K.A. Semendjajew, Taschenbuch der Mathematik, Verlag Nauka Moskau, Teubner<br />
Leipzig 1985<br />
/3/ H. Hofmann, Das elektromagnetische Feld – Theorie und grundlegende Anwendungen, Verlag<br />
Springer, Wien New York1982<br />
/4/ G. Heyne, Elektronische Meßtechnik – Eine Einführung für angehende Wissenschaftler, Verlag R.<br />
Oldenbourg, München Wien 1999<br />
/5/ E. Herter, W. Röcker, Nachrichtentechnik, Übertragung und Verarbeitung, Verlag C. Hanser,<br />
München Wien 1982<br />
/6/ M. Stöckl, K. H. Winterling, Elektrische Meßtechnik, B. G. Teubner, Stuttgart Wien 1978<br />
/7/ R. P. Patzelt, H. Schweinzer, Elektrische Meßtechnik, Zweite Auflage, Verlag Springer, Wien New<br />
York1996<br />
/8/ R. Lerch, Elektrische Meßtechnik - analog und digitale Verfahren, Verlag Springer, Wien New<br />
York1996<br />
/9/ R. Parthier, Messtechnik – Grundlagen für technische Fachrichtungen, Vieweg Verlag, Wiesbaden<br />
2001, ISBN 3-528-03941-8<br />
C.Brunner - Elektrische Messtechnik Seite 27/27