The BOSCH-CS Simulation Concept - Simpack.com
The BOSCH-CS Simulation Concept - Simpack.com
The BOSCH-CS Simulation Concept - Simpack.com

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
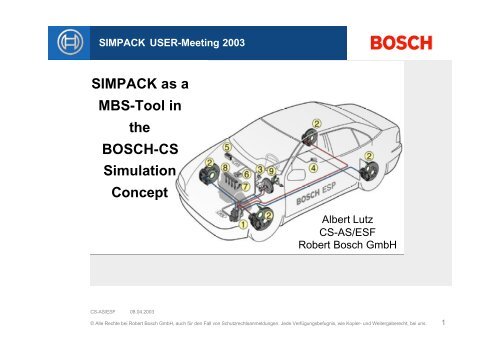
SIMPACK USER-Meeting 2003<br />
SIMPACK as a<br />
MBS-Tool in<br />
the<br />
<strong>BOSCH</strong>-<strong>CS</strong><br />
<strong>Simulation</strong><br />
<strong>Concept</strong><br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
Albert Lutz<br />
<strong>CS</strong>-AS/ESF<br />
Robert Bosch GmbH<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 1
Overview<br />
� <strong>Simulation</strong> in the development process of Vehicle Stabilising Systems:<br />
<strong>The</strong> <strong>BOSCH</strong>-<strong>CS</strong> <strong>Simulation</strong> <strong>Concept</strong><br />
� MBS-vehicle model<br />
� Realisation and process<br />
� Next steps<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 2
<strong>The</strong> <strong>BOSCH</strong>-<strong>CS</strong> <strong>Simulation</strong> <strong>Concept</strong><br />
A Mechatronic System requires various Tools<br />
Sensors: Yawrate, AY<br />
Wheel speed, Steering<br />
angle, Precharge pressure<br />
Tools:<br />
EDYSON, ...<br />
ECUs:<br />
ESP, ABSR, DME<br />
Tools:<br />
SABER, ...<br />
Mechanics:<br />
Chassis with<br />
suspension, steering<br />
system, drivetrain, tyres<br />
Tools:<br />
FASIM, SIMPACK, PKW0<br />
Miscellaneous:<br />
Driver, Environment<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
Application Software:<br />
Control and Safety Algorithm<br />
Tools: MS-Developer Studio, C-<br />
Compiler, Simulink, ASCET-SD<br />
Foundation and Actuation:<br />
MC, Booster, Wheel Brake<br />
Cylinder<br />
Tools: CoBrake<br />
Brakehydraulics:<br />
HU,Brakeline<br />
Tools: AMESIM,<br />
EDYSON, ...<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 3
<strong>The</strong> <strong>BOSCH</strong>-<strong>CS</strong> <strong>Simulation</strong> <strong>Concept</strong><br />
Local <strong>Simulation</strong> Activities imbedded into the <strong>Concept</strong><br />
S<br />
t<br />
a<br />
n<br />
d<br />
a<br />
l<br />
o<br />
n<br />
e<br />
S<br />
i<br />
m<br />
u<br />
l<br />
a<br />
t<br />
i<br />
o<br />
n<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
Realtime<br />
Models<br />
Functional<br />
Models<br />
Hydraulics<br />
System Design<br />
Structural<br />
Models<br />
Vehicle Dynamics <strong>Simulation</strong> with Control<br />
Realtime Models<br />
Electronics<br />
Realtime Models<br />
Foundation<br />
Functional Models<br />
Realtime Models<br />
Actuation<br />
Behavioural Models<br />
Structural Models<br />
Realtime Models<br />
Behavioural Models<br />
Structural Models<br />
Behavioural Models<br />
Structural Models<br />
Structural Models<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 4
SIMPACK<br />
<strong>com</strong>plex/<br />
reduced<br />
<strong>The</strong> <strong>BOSCH</strong>-<strong>CS</strong> <strong>Simulation</strong> <strong>Concept</strong><br />
Agreed <strong>Simulation</strong>s <strong>Concept</strong> at <strong>BOSCH</strong>-<strong>CS</strong><br />
Data<br />
�<br />
AMESIM<br />
<strong>com</strong>plex/<br />
reduced<br />
Data<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
Integration Platform MATLAB/SIMULINK<br />
MATLAB/SIMULINK<br />
Models<br />
S-Functions<br />
Co-<strong>Simulation</strong>:<br />
Interface <strong>Concept</strong><br />
and –Definition<br />
(„Steckersammlung“)<br />
SABER<br />
<strong>com</strong>plex/<br />
reduced<br />
Data<br />
Controller<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 5<br />
Data<br />
...<br />
Aspects:<br />
• One integration platform<br />
to set-up the <strong>com</strong>plete<br />
system by agreed interfaces<br />
• Agreed interfaces<br />
enable direct<br />
implementation of the<br />
models or coupling by<br />
<strong>com</strong>munication modules<br />
(Co<strong>Simulation</strong>)<br />
• Tool decision<br />
platform is<br />
MATLAB/SIMULink
<strong>The</strong> <strong>BOSCH</strong>-<strong>CS</strong> <strong>Simulation</strong> <strong>Concept</strong><br />
<strong>Simulation</strong> in the Development Process of Vehicle<br />
Stabilising Systems<br />
� Systems Development<br />
� Design of Control Algorithm<br />
� Systems Application<br />
� Component Development<br />
� Fundamental Research<br />
� Knowledge Management<br />
� Co-operation with Customers<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 6
Amplitude<br />
MBS-Vehicle Model<br />
Application Area of Vehicle Models<br />
Functional MBS-<br />
Model<br />
Handling<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
USER<br />
Comfort<br />
Structural<br />
MBS-Model<br />
Frequency<br />
Oscillations<br />
Specialists,<br />
Developer<br />
of Bodies<br />
Structural<br />
MBS-Model<br />
with FEM<br />
Structural<br />
Oscillations<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 7
MBS-Vehicle Model<br />
Mastertitelformat bearbeiten<br />
SIMPACK<br />
SIMPACK:<br />
One Tool<br />
One Basic Dataset<br />
One Modeltyp<br />
Model Development Model Application<br />
SIMPACK<br />
Stand alone<br />
Vehicle Modelling<br />
Fundamental Investi-<br />
gations w.r.t. MBS<br />
SIMPACK<br />
in Co<strong>Simulation</strong> (SIMAT)<br />
- ABS-Development<br />
- MBS-Investigations<br />
- New Actuator <strong>Concept</strong>s<br />
- Wirkketten-Engineering<br />
- Small number of projects,<br />
- SIMPACK know how<br />
Code Export - <strong>CS</strong>_CAR<br />
Plugin to SIMULink<br />
- SW-Development and<br />
Quality Assurance<br />
- System Development<br />
- System-Application<br />
- Big number of projects,<br />
- no SIMPACK know how<br />
<strong>CS</strong>-AS/ESF21.08.2001<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
MBS-Vehicle Model<br />
Specification of <strong>CS</strong>-CAR<br />
� Vehicle with rigid bodies and 15 DOFs<br />
� Suspension kinematics described by kinematics maps<br />
� Interfaces for tyre models of different <strong>com</strong>plexity<br />
� Environment described by files and evaluated by SIMPACK-function<br />
� Interfaces for other vehicle <strong>com</strong>ponents<br />
� Interfaces to <strong>BOSCH</strong> <strong>com</strong>ponents (sensors, actuators, controller, brake, ...)<br />
� Implemented in SIMULink as a plug in using the SIMULink solver<br />
� Modelling based on SIMPACK with Code Export<br />
� Parameterisation capability<br />
� Vehicle data base according to <strong>BOSCH</strong>-<strong>CS</strong> requests<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 9
Realisation and Process<br />
Structure of <strong>CS</strong>_CAR<br />
Model with<br />
SIMPACK<br />
Algorithm<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
Model Library<br />
owned by <strong>BOSCH</strong> by INTEC<br />
SIMULINK<br />
IF<br />
Routines SIMPACK<br />
Library<br />
Vehicle<br />
Data Library<br />
owned by <strong>BOSCH</strong><br />
Parameters Environ-<br />
mental<br />
Parameter<br />
Initial<br />
Conditions<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 10
Realisation and Process<br />
<strong>CS</strong>_CAR with Components modelled by <strong>BOSCH</strong>-<strong>CS</strong><br />
Brake Hydraulics<br />
Tyre<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
Vehicle <strong>CS</strong>_CAR<br />
Environment<br />
Vereinfacht, zur Bedienung ESP-IF auf Basis CAN11h<br />
Robert Bosch GmbH<br />
K1-Si/ESV2-Lutz<br />
Version: 1.2<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 11<br />
(VR_HL+VR_HR)*<br />
0.5 * iGes<br />
Motordrehzahl<br />
N_MOT [U/min]<br />
Fahrergaspedal<br />
W_FPDK [%]<br />
=f(t)<br />
*<br />
MD_RAT<br />
Schnittstelle zum<br />
Fzg.-Modell<br />
Schnittstelle zum<br />
Regler<br />
ASC_Sollwert_<br />
Luftmasse<br />
MD_ASC_LM<br />
[%] Init=100%<br />
MSR_Sollwert<br />
MD_MSR [%]<br />
Init=0%<br />
Motormodell<br />
Reibmoment<br />
MD_REIB [%]<br />
= const = 10%<br />
Fahrervorgabe<br />
DROSS_WINKEL<br />
[%] = W_FPDK<br />
ASC_Sollwert<br />
MD_ASC [%]<br />
Init=100%<br />
MIN MAX PT1D K TTD K<br />
Motormoment<br />
MMot = f(N_MOT,<br />
W_FPDK)<br />
MIN<br />
IF zu MKS-<br />
Tool<br />
10000.<br />
MIN<br />
MD_RAT<br />
=<br />
MD_MAX<br />
/<br />
MD_NORM<br />
Animation<br />
Max. Motormoment<br />
MD_MAX [Nm]<br />
= 220 Nm<br />
*<br />
MD_RAT<br />
Normmoment<br />
MD_NORM [Nm]<br />
= 600 Nm<br />
Drivetrain<br />
Engine<br />
PT1 Mot TTMot<br />
Motormoment<br />
MD_IND [%]<br />
Motormoment nach<br />
Eingriff<br />
MD_IND_NE [%]<br />
PT1 Mot<br />
TTMot<br />
+<br />
Kurbelwel<br />
lenantriebs<br />
moment<br />
*<br />
-<br />
C<br />
A<br />
N<br />
R<br />
E<br />
G<br />
L<br />
E<br />
R<br />
O<br />
U<br />
T<br />
P<br />
U<br />
C<br />
A<br />
N<br />
R<br />
E<br />
G<br />
L<br />
E<br />
R<br />
I<br />
N<br />
P<br />
U<br />
T
Realisation and Process<br />
Process of Model Set-up<br />
Specification<br />
Modelling in SIMPACK<br />
Customer<br />
Structural<br />
Model<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
Code Export<br />
Only for structural Models<br />
S-Function Generation<br />
Parameterisation<br />
Verification, Validation<br />
Archiving<br />
Customer<br />
Data<br />
<strong>BOSCH</strong><br />
Model<br />
Library<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 12
Realisation and Process<br />
Process of Model Set-up<br />
Using <strong>CS</strong>-CAR for several projects requires<br />
automised conversion of data sets to target tool<br />
� Development of tool specific converters<br />
� Adaptation to different data formats and number of input and output files<br />
� Conversion of characteristic maps and curves for suspension kinematics<br />
� Adaptation to transformation matrix parameters and direction of rotation<br />
� Determination of conversion function concerning spring, damper and anti-roll<br />
bar<br />
� Transformation of spring and damper data fields into global coord. system<br />
� Conversion of tyre maps<br />
� Estimation formalisms for none available parameters<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 13
Realisation and Process<br />
Pilot Project with Structure and Interfaces<br />
.<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
Aspects:<br />
• Feasibility Study<br />
• Fundamental questions<br />
• MATLAB/SIMULink<br />
• used as platform<br />
• Models of all <strong>com</strong>ponents<br />
• all <strong>CS</strong>-Business Units engaged<br />
• ESP Controller<br />
implemented to<br />
MATLAB/SIMULink<br />
• using ECU-Code<br />
• <strong>CS</strong>_CAR_1<br />
• specified by <strong>BOSCH</strong><br />
• developed by INTEC<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 14
Next Steps<br />
Function and Projects<br />
� Application in different pilot projects<br />
� Build up of a model library for several projects<br />
� Using elastokinematics<br />
� Using structural axis<br />
SW-Architecture, Environment<br />
� Set up archiving and data base<br />
� Documentation<br />
� GUI<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 15
SIMPACK USER-Meeting 2003<br />
• Thank you<br />
for your<br />
Attention<br />
<strong>CS</strong>-AS/ESF 08.04.2003<br />
Albert Lutz<br />
<strong>CS</strong>-AS/ESF<br />
Robert Bosch GmbH<br />
© Alle Rechte bei Robert Bosch GmbH, auch für den Fall von Schutzrechtsanmeldungen. Jede Verfügungsbefugnis, wie Kopier- und Weitergaberecht, bei uns. 16