Elastokinematik - SimPack
Elastokinematik - SimPack
Elastokinematik - SimPack

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
SIMPACK - USER MEETING<br />
13.-14. November 2001<br />
Automatisierte Abbildung von Kinematik und<br />
<strong>Elastokinematik</strong> aus Prüfstandsversuchen<br />
zur Fahrdynamiksimulation<br />
Dipl.-Ing. Christoph Elbers<br />
Dipl.-Ing. Thomas Schrüllkamp<br />
INSTITUT FÜR<br />
KRAFTFAHRWESEN<br />
AACHEN<br />
1el0016.ppt
Struktur des Vortrags<br />
Einführung<br />
- Bedeutung von Kinematik und <strong>Elastokinematik</strong> für die Fahrmechanik<br />
Aufbau des ika-Achsmessprüfstands<br />
- Prüfstandskonzept, Steuerung, Messtechnik<br />
Entwicklung des Achsidentifikationstools<br />
- Programmaufbau Matlab/Simulink, Identifikation, Analyse<br />
Abbildung des Achsmessprüfstand in Simpack<br />
- Validierung, Fehlerbetrachtung bei kombinierter Belastung<br />
Gesamtfahrzeug in Versuch und Simulation<br />
- Aufbau eines Fahrzeugmodells, Fahrversuche<br />
Zusammenfassung und Ausblick<br />
1el0016.ppt
Kinematik und <strong>Elastokinematik</strong><br />
Die Kinematik der Radaufhängung bestimmt die räumliche Bewegung<br />
des Rades gegenüber dem Fahrzeugaufbau bei Federungs- und<br />
Lenkbewegung ohne Berücksichtigung äußerer Lasten<br />
Die <strong>Elastokinematik</strong> beschreibt die Abstimmung aller elastischen<br />
Elemente einer Radaufhängung und die räumliche Anordnung der<br />
Achslenker mit dem Ziel, die durch Elastizitäten entstehende<br />
Verformungen unter äußerer Belastung zu kompensieren oder in<br />
gewünschte Bewegungen umzuwandeln<br />
1el0016.ppt
Sturz- und Spurwinkeländerungen<br />
Die für das Fahrverhalten wichtigsten Radstellungsänderungen<br />
sind die kinematischen und elastokinematischen<br />
Sturz- und Spurwinkeländerungen<br />
Kinematische Spurwinkeländerung<br />
Fahrzeugsauslegung: Wankuntersteuernd<br />
VA:<br />
HA:<br />
kinematische Nachspuränderung beim Einfedern<br />
kinematische Vorspuränderung beim Einfedern<br />
Beeinflussung des Lenkverhaltens:<br />
+ Erhöhung der Fahrstabilität<br />
- Geradeauslaufeigenschaften des Fahrzeugs<br />
1el0016.ppt
Elastokinematische Spurwinkeländerung<br />
Die elastokinematische Radstellungsänderung<br />
hängt vom Achsprinzip, der Anordnung der<br />
Lenker und den Elastizitäten der Achse ab<br />
Vorspuränderung durch Seitenkräfte<br />
Fahrzeugsauslegung: Seitenkraftuntersteuernd<br />
VA: kurvenäußeres Rad geht unter Querkraft in Nachspur<br />
kurveninneres - in Vorspur<br />
HA: kurvenäußeres Rad geht unter Querkraft in Vorspur<br />
kurveninneres – in Nachspur<br />
Bei Kurvenfahrt sind die Lenkwinkeländerungen<br />
des Außenrades wichtig, weil hier die größeren Kräfte wirken<br />
1el0016.ppt
Elastokinematische Spurwinkeländerung<br />
Vorspuränderung durch Längskräfte<br />
Fahrzeugsauslegung: Es ergeben sich Zielkonflikte aus den Anforderungen<br />
verschiedenster Fahrzustände<br />
Bremsen, Beschleunigen:<br />
besser Fahrstabilität, wenn beide Achsen leicht in Vorspur gehen<br />
µ-split Bremsung:<br />
VA: unter Bremskraft in Vorspur<br />
HA: unter Bremskraft in Nachspur<br />
Stabilisierung des Fahrzeugs<br />
durch entgegengerichtetes Giermoment<br />
1el0016.ppt
Elastokinematische Spurwinkeländerung<br />
Lastwechsel in der Kurve:<br />
VA: unter Bremskraft in Nachspur<br />
HA: unter Bremskraft in Vorspur<br />
kurvenaußen gerichtetes Giermoment<br />
Eine einzige optimale elastokinematische Auslegung kann<br />
es nicht geben<br />
In der Realität sind die Fahrzeuge meist so ausgelegt, dass<br />
die Vorderachse unter Bremskraft leicht in Nachspur<br />
und die Hinterachse leicht in Vorspur gehen<br />
Wenn es das Achskonzept zulässt, werden angetriebene Hinterachsen<br />
zusätzlich so ausgelegt, dass sie auch bei Vortriebskraft in Vorspur gehen<br />
1el0016.ppt
Kinematische und Elastokinematische<br />
Sturzwinkeländerung<br />
negativer Sturz bei Kurvenfahrt<br />
Erhöhung der Seitenkräfte<br />
Abnahme des Schräglaufwinkels<br />
bei gleichbleibender Querbeschleunigung<br />
Freie Bewegungsrichtung<br />
g g g<br />
M<br />
F<br />
Diese Tendenz bedeutet:<br />
• Bei negativen Sturz nur an der Vorderachse weniger Untersteuern<br />
• Bei negativen Sturz nur an der Hinterachse mehr Untersteuern<br />
Nachteil :<br />
Reifenverschleiß<br />
1el0016.ppt
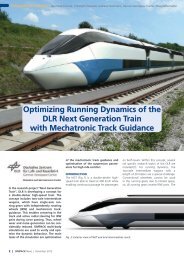
Aufbau eines realen Achsmessprüfstands<br />
Zur objektiven Beurteilung und Entwicklung neuer Fahrwerke<br />
ist die Kenntnis der Achs- und <strong>Elastokinematik</strong> unerlässlich<br />
Entwicklung eines Prüfstands zur Messung der<br />
achsspezifischen Kennwerte unter möglichst<br />
realitätsnahen Bedingungen<br />
• Verstellbarer Radstand:<br />
• Verstellbare Spurweite:<br />
• Maximaler Federweg:<br />
• Maximale Radlast:<br />
• Maximale Querkraft:<br />
• Maximale Längskraft:<br />
bis 3250 mm<br />
bis 1650 mm<br />
300 mm<br />
14 kN<br />
9 kN<br />
9 kN<br />
1el0016.ppt
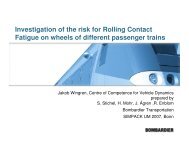
Frontansicht des Achsmeßstands<br />
Einleitung der äußeren Belastung durch<br />
Hydraulikzylinder und Hebelsystem<br />
Pro Turm:<br />
Seitenkraft (dargestellt)<br />
Längskraft (um 90° gedreht)<br />
Simulation des Federwegs durch<br />
Verfahren der Zylinder in z-Richtung<br />
Einstellung der Spurweite und des<br />
Radstands durch Verschiebung<br />
der Türme in y- und x-Richtung<br />
Linearführung<br />
1el0016.ppt
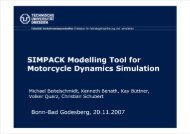
Radersatzsystem mit Sensoren<br />
Radersatzsystem mit<br />
einstellbarem Radhalbmesser,<br />
Einpresstiefe und pneumatischen<br />
Nachlauf<br />
Autokollimator<br />
zur Ermittlung<br />
der Spur- und<br />
Sturzwinkeländerung<br />
Seilpotentiometer zur<br />
Ermittlung der<br />
Verschiebungen des<br />
Radaufstandspunktes<br />
Luftlager zur reibungsfreien<br />
Krafteinleitung<br />
1el0016.ppt
Achsvermessung<br />
Durch verschiedene Fahrmanöver treten unterschiedliche<br />
Belastungskollektive auf<br />
Um alle möglichen Belastungen und Belastungsrichtungen<br />
zu berücksichtigen, wurden Messprozeduren entwickelt,<br />
die die Radstellungswinkel als Funktion des Federwegs,<br />
der Längs- und Querkraft ermitteln<br />
Alle möglichen Kombinationen der Parameter untereinander werden<br />
nachgefahren und man erhält ein dreidimensionales Kennfeld<br />
der Spur- und Sturzwinkelmatrix<br />
1el0016.ppt
100<br />
50<br />
0<br />
-50<br />
-100<br />
0 100 200 300 400 500<br />
Zeitkanal [s]<br />
4000<br />
2000<br />
0<br />
-2000<br />
-4000<br />
0 100 200 300 400 500<br />
Zeitkanal [s]<br />
Autosequenz zur Messung<br />
der Spur- und Sturzwinkelmatrix<br />
Belastungszyklus:<br />
Federweg<br />
Längskraft<br />
Änderung des<br />
Federweges<br />
Änderung der<br />
Längskraft<br />
Rampenförmige<br />
Querkraftbelastung<br />
1el0016.ppt<br />
Fx , Fy [N]<br />
Sz [mm]
Messprozedur zur Ermittlung<br />
der Spur- und Sturzwinkelmatrix<br />
1el0016.ppt
Autosequenz zur Messung<br />
der Federkennlinie<br />
Belastungszyklus:<br />
Sz VL, VR [N]<br />
100<br />
50<br />
0<br />
Hubfederung:<br />
Gleichsinnige Aus- und Einfederung<br />
der beiden Räder einer Achse<br />
-50<br />
-100<br />
0 10 20 30 40 50 60 70<br />
Sz VL Sz VR<br />
Zeitkanal [s]<br />
Wankfederung:<br />
Gegensinnige Aus- und Einfederung<br />
der beiden Räder einer Achse<br />
1el0016.ppt
Autosequenz zur Messung<br />
des Wankpols und Nickpols<br />
Belastungszyklus:<br />
Hubfederung:<br />
Gleichsinnige Aus- und Einfederung<br />
der beiden Räder einer Achse<br />
0el0224.ppt<br />
Sz VR [N]<br />
100<br />
50<br />
0<br />
-50<br />
- Spurweitenänderungskurve<br />
- Radstandsänderungskurve<br />
-100<br />
0 5 10 15 20 25 30 35<br />
Zeitkanal [s]<br />
1el0016.ppt
Entwicklung des Achsidentifikationstools<br />
Zur fahrdynamischen Untersuchung von Fahrzeugen mit Hilfe von<br />
Simulationsmodellen sind die Kinematik und <strong>Elastokinematik</strong> der<br />
implementierten Radaufhängung von entscheidender Bedeutung<br />
Um eine hohe Abbildungsgenauigkeit der Simulationsmodelle<br />
zu bekommen, müssen neben den Gummilagern einer Achse auch<br />
weitere Bauteilsteifigkeiten berücksichtigt werden (MKS, FEM)<br />
Hoher Aufwand für Modellgenerierung<br />
Daten der Fahrzeuggenerationen sind selten frei verfügbar<br />
Modellansatz:<br />
Die achsspezifischen Kenngrößen werden aus den gemessenen<br />
Prüfstandsdaten mathematisch abgebildet und in sogenannten<br />
Black Boxes als S-Funktion zur Verfügung gestellt<br />
1el0016.ppt
Entwicklung des Achsidentifikationstools<br />
Informationen über die kinematischen Anlenkpunkte,<br />
Bushing- und Lenkersteifigkeiten müssen nicht bekannt sein<br />
1el0016.ppt
Achsidentifikationstool<br />
1el0016.ppt
Achsidentifikationstool<br />
Spur-, Sturzwinkel<br />
Mit Hilfe des Achsidentifikationstools reduzieren sich die verschiedenen<br />
Einzelradaufhängungen auf mathematische Zusammenhänge zwischen<br />
den Eingangsgrößen Längskraft, Seitenkraft und Federweg und<br />
den Ausgangsgrößen Spurwinkel, Sturzwinkel, Radlast, Wankpol und Nickpol<br />
Spurwinkel<br />
Sturzwinkel<br />
Sturzwinkel<br />
Spurwinkel<br />
Spurwinkel,<br />
Sturzwinkel<br />
= f (Längskraft, Seitenkraft, Federweg)<br />
1el0016.ppt
Radlast, Nickwinkel<br />
Radlast<br />
= f (Federweg)<br />
Nickwinkel<br />
= f (Federweg)<br />
1el0016.ppt
Wankpol<br />
Bei wechselseitiger Einfederung (z. B. Kurvenfahrt)<br />
also bei unsymmetrischer Federbewegung wandert<br />
der Wankpol aus der Fahrzeugmitte heraus<br />
Wankpolkoordinaten z,y<br />
= f (Federweg r, Federweg l)<br />
1el0016.ppt
Einzelwertanalysen<br />
1el0016.ppt
Graphische Analysen<br />
1el0016.ppt
Aufbau des Achsmessprüfstands in Simpack<br />
zur Validierung des Achsidentifikatiostools<br />
L: 6 DOF<br />
Oberer Querlenker<br />
Rot α,β, χ<br />
Bushing I, II<br />
Pre-Prozessor<br />
Isys<br />
0 DOF<br />
dummy<br />
L: 6 DOF<br />
Unterer Querlenker<br />
Bushing III, IV<br />
Trans z<br />
L: x, y, z<br />
Oberer<br />
Dämpfer<br />
Rot α,β, χ<br />
Unterer<br />
Dämpfer<br />
Radträger<br />
Integration verschiedener<br />
Achsmodule<br />
Dämpfer<br />
0 DOF<br />
Feder<br />
L: x,y<br />
Spurdummy<br />
Bushing V<br />
Spurstange<br />
Rot α,β<br />
0el332.ppt<br />
AMS-Simulation (Simpack)<br />
0 DOF<br />
L: 6 DOF<br />
Rad Dummy<br />
Matrix.aut<br />
Achse xy<br />
Rot α<br />
Rdyn<br />
Bremse<br />
0 DOF<br />
ET<br />
Fy-Seitenkraft<br />
Rot α,β<br />
Nachlauf Fy<br />
0 DOF<br />
0 DOF<br />
Fe_Wp_Np.aut<br />
Isys<br />
L: x,y,z<br />
Fx-Längskraft<br />
Trans z<br />
Fx-Zylinder<br />
Rot α,β<br />
L: x,y,z<br />
L: x,y,z<br />
Fx-Kolben<br />
Welle<br />
Rot α,β<br />
Rot α<br />
Fy-Arm<br />
Winkel<br />
0 DOF<br />
Luftlager<br />
L: x,y,z<br />
Fy-Zylinder<br />
Trans z<br />
Fy-Kolben<br />
Rot α,β<br />
Fx-Arm<br />
L: z<br />
Rot α<br />
Rot α<br />
AMS_V1_2.aut<br />
0 DOF<br />
Sz-Federweg<br />
Trans z<br />
0 DOF 0 DOF<br />
Boden Radstand Spurweite<br />
1el0016.ppt
Validierung des Achsidentifikationstools<br />
Pre-Prozessor<br />
Simulation<br />
Post-Prozessor<br />
Achsidentifikation<br />
0 DOF<br />
L: 6 DOF<br />
Rad Dummy<br />
Achse xy<br />
Rot α<br />
Bremse<br />
0 DOF<br />
Rdyn<br />
ET<br />
Fy-Seitenkraft<br />
Rot α,β<br />
Nachlauf Fy<br />
0 DOF<br />
0 DOF<br />
Rot α,β<br />
Rot α<br />
Winkel<br />
Isys<br />
Fx-Längskraft<br />
L: x,y,z<br />
L: x,y,z<br />
Welle<br />
Luftlager<br />
0 DOF<br />
L: x,y,z<br />
Fx-Zylinder<br />
Trans z<br />
Fx-Kolben<br />
Rot α,β<br />
Fy-Arm<br />
L: x,y,z<br />
Trans z<br />
Rot α,β<br />
Fy-Zylinder<br />
Fy-Kolben<br />
Fx-Arm<br />
L: z<br />
Rot α Rot α<br />
Sz-Federweg<br />
0 DOF<br />
0 DOF 0 DOF<br />
Boden Radstand Spurweite<br />
Trans z<br />
Achsidentifikation<br />
S-Funktionen<br />
0el0378.ppt<br />
Seitenkraft<br />
Längskraft<br />
Federweg<br />
0 DOF<br />
L: 6 DOF<br />
Rad Dummy<br />
Rot α<br />
Bremse<br />
0 DOF<br />
Achse xy<br />
Rdyn<br />
Rot α,β<br />
0 DOF<br />
Fy-Seitenkraft<br />
Nachlauf Fy<br />
ET<br />
0 DOF<br />
Spurwinkel<br />
Sturzwinkel<br />
Radlast<br />
Wankpol<br />
Nickwinkel<br />
Rot α,β<br />
Rot α<br />
Winkel<br />
Isys<br />
Fx-Längskraft<br />
L: x,y,z<br />
L: x,y,z<br />
Welle<br />
Luftlager<br />
0 DOF<br />
L: x,y,z<br />
Fx-Zylinder<br />
Trans z<br />
Fx-Kolben<br />
Rot α,β<br />
Fy-Arm<br />
L: x,y,z<br />
Trans z<br />
Rot α,β<br />
Fy-Zylinder<br />
Fy-Kolben<br />
Fx-Arm<br />
L: z<br />
Rot α<br />
Rot α<br />
Sz-Federweg<br />
0 DOF<br />
Trans z<br />
0 DOF 0 DOF<br />
Boden Radstand Spurweite<br />
Simpack<br />
1el0016.ppt
Validierung des Achsidentifikationstool<br />
Zur Beschreibung der Achse existieren somit zwei Modellansätze,<br />
die nun miteinander verglichen werden können:<br />
Der erste Modellansatz basiert auf einer modellierten Achse,<br />
mit Kenntnis der kinematischen Anlenkpunkte und<br />
elastokinematischen Randbedingungen (Bushingsteifigkeiten)<br />
Der andere Modellansatz basiert auf Messungen der Achse<br />
auf einem realen oder auf einem virtuellen Prüfstand und der<br />
anschließenden mathematischen Beschreibung der Achse<br />
(S-Funktion)<br />
1el0016.ppt
Spurwinkeländerung<br />
1<br />
Spurwinkel [°]<br />
0.5<br />
0<br />
-0.5<br />
Spurwinkel (Simpack)<br />
Spurwinkel (Achsidentifikation)<br />
Fx positiv<br />
Fy positiv<br />
positiv<br />
-1<br />
-60 -40 -20 0 20 40 60 80<br />
Federweg [mm]<br />
0.5<br />
0.5<br />
Spurwinkel [°]<br />
0.25<br />
0<br />
-0.25<br />
Spurwinkel (Simpack)<br />
Spurwinkel (Achsidentifikation)<br />
-0.5<br />
-5000 -2500 0 2500 5000<br />
Spurwinkel [°]<br />
0.25<br />
0<br />
-0.25<br />
Spurwinkel (Simpack)<br />
Spurwinkel (Achsidentifikation)<br />
-0.5<br />
-5000 -2500 0 2500 5000<br />
Längskraft [N]<br />
Seitenkraft [N]<br />
1el0016.ppt
0 DOF<br />
L: x,y,z<br />
L: x,y,z<br />
0 DOF<br />
Trans z<br />
Trans z<br />
L: 6 DOF<br />
Rot α,β<br />
Rot α,β<br />
L: x,y,z<br />
L: x,y,z<br />
Rot α<br />
Rot α,β<br />
Rot α,β<br />
Bremse<br />
0 DOF<br />
0 DOF<br />
Rot α<br />
Rot α<br />
Rot α<br />
0 DOF<br />
0 DOF<br />
L: z<br />
Trans z<br />
Vergleich zwischen Superposition<br />
und kombinierter Belastung<br />
Einzelbelastung<br />
Rad Dummy<br />
Fx<br />
Isys<br />
Fx-Zylinder<br />
Fy-Zylinder<br />
Achse xy<br />
Rdyn<br />
ET<br />
Fy-Seitenkraft<br />
Nachlauf Fy<br />
Fx-Längskraft<br />
Welle<br />
Fx-Kolben<br />
Fy-Kolben<br />
0 DOF 0 DOF<br />
Winkel<br />
Luftlager<br />
Fy-Arm<br />
Fx-Arm<br />
Sz-Federweg<br />
Boden Radstand Spurweite<br />
Spurwinkel<br />
Längskraft<br />
1el0016.ppt
0 DOF<br />
L: x,y,z<br />
L: x,y,z<br />
0 DOF<br />
Trans z<br />
Trans z<br />
L: 6 DOF<br />
Rot α,β<br />
Rot α,β<br />
L: x,y,z<br />
L: x,y,z<br />
Rot α<br />
Rot α,β<br />
Rot α,β<br />
Bremse<br />
0 DOF<br />
0 DOF<br />
Rot α<br />
Rot α<br />
Rot α<br />
0 DOF<br />
0 DOF<br />
L: z<br />
Trans z<br />
Vergleich zwischen Superposition<br />
und kombinierter Belastung<br />
Einzelbelastung<br />
Fy<br />
Isys<br />
Fx-Zylinder<br />
Fy-Zylinder<br />
Achse xy<br />
Rdyn<br />
ET<br />
Fy-Seitenkraft<br />
Nachlauf Fy<br />
Fx-Längskraft<br />
Welle<br />
Fx-Kolben<br />
Fy-Kolben<br />
Rad Dummy<br />
0 DOF 0 DOF<br />
Winkel<br />
Luftlager<br />
Fy-Arm<br />
Fx-Arm<br />
Sz-Federweg<br />
Boden Radstand Spurweite<br />
Spurwinkel<br />
Seitenkraft<br />
1el0016.ppt
0 DOF<br />
L: x,y,z<br />
L: x,y,z<br />
0 DOF<br />
Trans z<br />
Trans z<br />
L: 6 DOF<br />
Rot α,β<br />
Rot α,β<br />
L: x,y,z<br />
L: x,y,z<br />
Rot α<br />
Rot α,β<br />
Rot α,β<br />
Bremse<br />
0 DOF<br />
0 DOF<br />
Rot α<br />
Rot α<br />
Rot α<br />
0 DOF<br />
0 DOF<br />
L: z<br />
Trans z<br />
Vergleich zwischen Superposition<br />
und kombinierter Belastung<br />
Einzelbelastung<br />
+<br />
Sz<br />
Isys<br />
Fx-Zylinder<br />
Fy-Zylinder<br />
Achse xy<br />
Rdyn<br />
ET<br />
Fy-Seitenkraft<br />
Nachlauf Fy<br />
Fx-Längskraft<br />
Welle<br />
Fx-Kolben<br />
Fy-Kolben<br />
Rad Dummy<br />
Winkel<br />
Luftlager<br />
Fy-Arm<br />
Fx-Arm<br />
Spurwinkel<br />
0 DOF 0 DOF<br />
Sz-Federweg<br />
Boden Radstand Spurweite<br />
Federweg<br />
1el0016.ppt
0 DOF<br />
L: x,y,z<br />
L: x,y,z<br />
0 DOF<br />
L: x,y,z<br />
L: x,y,z<br />
0 DOF<br />
L: x,y,z<br />
L: x,y,z<br />
0 DOF<br />
0 DOF<br />
0 DOF<br />
Trans z<br />
Trans z<br />
Trans z<br />
Trans z<br />
Trans z<br />
Trans z<br />
L: 6 DOF<br />
Rot α,β<br />
Rot α,β<br />
L: x,y,z<br />
L: x,y,z<br />
L: 6 DOF<br />
Rot α,β<br />
Rot α,β<br />
L: x,y,z<br />
L: x,y,z<br />
L: 6 DOF<br />
Rot α,β<br />
Rot α,β<br />
L: x,y,z<br />
L: x,y,z<br />
Rot α<br />
Rot α<br />
Rot α<br />
Rot α,β<br />
Rot α,β<br />
Rot α,β<br />
Rot α,β<br />
Rot α,β<br />
Rot α,β<br />
Bremse<br />
0 DOF<br />
0 DOF<br />
Rot α<br />
Bremse<br />
0 DOF<br />
0 DOF<br />
Rot α<br />
Bremse<br />
0 DOF<br />
0 DOF<br />
Rot α<br />
Rot α<br />
Rot α<br />
Rot α<br />
Rot α<br />
Rot α<br />
Rot α<br />
0 DOF<br />
0 DOF<br />
Trans z<br />
0 DOF<br />
0 DOF<br />
L: z<br />
L: z<br />
Trans z<br />
0 DOF<br />
0 DOF<br />
L: z<br />
Trans z<br />
0 DOF<br />
L: x,y,z<br />
L: x,y,z<br />
0 DOF<br />
Trans z<br />
Trans z<br />
L: 6 DOF<br />
Rot α,β<br />
Rot α,β<br />
L: x,y,z<br />
L: x,y,z<br />
Rot α<br />
Rot α,β<br />
Rot α,β<br />
Bremse<br />
0 DOF<br />
0 DOF<br />
Rot α<br />
Rot α<br />
Rot α<br />
0 DOF<br />
0 DOF<br />
L: z<br />
Trans z<br />
Vergleich zwischen Superposition<br />
und kombinierter Belastung<br />
Einzelbelastung<br />
Kombinierte Belastung<br />
Rad Dummy<br />
Fx<br />
Isys<br />
Fx-Zylinder<br />
Fy-Zylinder<br />
Achse xy<br />
Rdyn<br />
ET<br />
Fy-Seitenkraft<br />
Nachlauf Fy<br />
Fx-Längskraft<br />
Welle<br />
Fx-Kolben<br />
Fy-Kolben<br />
0 DOF 0 DOF<br />
Winkel<br />
Luftlager<br />
Fy-Arm<br />
Fx-Arm<br />
Sz-Federweg<br />
Boden Radstand Spurweite<br />
Spurwinkel<br />
Längskraft<br />
Superposition<br />
Achsidentifikation<br />
Federweg<br />
Fy<br />
Isys<br />
Fx-Zylinder<br />
Fy-Zylinder<br />
Achse xy<br />
Rdyn<br />
ET<br />
Fy-Seitenkraft<br />
Nachlauf Fy<br />
Fx-Längskraft<br />
Welle<br />
Fx-Kolben<br />
Fy-Kolben<br />
Rad Dummy<br />
0 DOF 0 DOF<br />
Winkel<br />
Luftlager<br />
Fy-Arm<br />
Fx-Arm<br />
Sz-Federweg<br />
Boden Radstand Spurweite<br />
Spurwinkel<br />
Seitenkraft<br />
+<br />
+<br />
+<br />
Spurwinkel<br />
Sz<br />
Isys<br />
Fx-Zylinder<br />
Fy-Zylinder<br />
Achse xy<br />
Rdyn<br />
ET<br />
Fy-Seitenkraft<br />
Nachlauf Fy<br />
Fx-Längskraft<br />
Welle<br />
Fx-Kolben<br />
Fy-Kolben<br />
Rad Dummy<br />
Winkel<br />
Luftlager<br />
Fy-Arm<br />
Fx-Arm<br />
Spurwinkel<br />
Seitenkraft<br />
Längskraft<br />
0el0378.ppt<br />
0 DOF 0 DOF<br />
Sz-Federweg<br />
Boden Radstand Spurweite<br />
Federweg<br />
Simulation<br />
Rad Dummy<br />
Achse xy<br />
Rdyn<br />
ET<br />
Fy-Seitenkraft<br />
Nachlauf Fy<br />
Winkel<br />
Isys<br />
Fx-Längskraft<br />
Welle<br />
Luftlager<br />
Fx-Zylinder<br />
Fx-Kolben<br />
Fy-Arm<br />
Fy-Zylinder<br />
Fy-Kolben<br />
Fx-Arm<br />
Sz-Federweg<br />
0 DOF 0 DOF<br />
Boden Radstand Spurweite<br />
1el0016.ppt
Fehlerbetrachtung des Spurwinkels zwischen<br />
kombinierter Belastung und Superposition<br />
0.5<br />
Signifikante Unterschiede im<br />
Spurwinkelverlauf<br />
Spurwinkel [°]<br />
0.25<br />
0<br />
-0.25<br />
Spurwinkel Superposition<br />
Spurwinkel Matrix<br />
Superposition<br />
-0.5<br />
-5000 -2500 0 2500 5000<br />
Spurwinkel [°]<br />
kombinierte Belastung (Matrix)<br />
Spurwinkel [°]<br />
0.5<br />
0.25<br />
0<br />
-0.25<br />
Längskraft [N]<br />
Spurwinkel Superposition<br />
Spurwinkel Matrix<br />
Seitenkraft [N]<br />
Längskraft [N]<br />
-0.5<br />
-5000 -2500 0 2500 5000<br />
Seitenkraft [N]<br />
1el0016.ppt
Fehlerbetrachtung des Sturzwinkels zwischen<br />
kombinierter Belastung und Superposition<br />
1<br />
Signifikante Unterschiede im<br />
Sturzwinkelverlauf<br />
Sturzwinkel [°]<br />
0.5<br />
0<br />
-0.5<br />
Sturzwinkel Superposition<br />
Sturzwinkel Matrix<br />
Sturzwinkel [°]<br />
Superposition<br />
kombinierte Belastung (Matrix)<br />
Längskraft [N]<br />
Seitenkraft [N]<br />
Sturzwinkel [°]<br />
-1<br />
-5000 -2500 0 2500 5000<br />
Längskraft [N]<br />
1<br />
0.5<br />
0<br />
-0.5 Sturzwinkel Superposition<br />
Sturzwinkel Matrix<br />
-1<br />
-5000 -2500 0 2500 5000<br />
Seitenkraft [N]<br />
1el0016.ppt
Simulation und Versuch<br />
Aufbau eines Vollfahrzeugmodells in Matlab/Simulink<br />
mit fünf einzelnen Massen (vier Radmassen, Aufbaumasse)<br />
Kopplung der Massen über Feder-Dämpfer-Systeme<br />
Aufstellen der Bewegungsdifferentialgleichungen:<br />
Gradlinige Bewegung: Newton<br />
m<br />
i<br />
⋅ & x<br />
i<br />
Drehbewegung: Drallsatz<br />
( t) = ∑<br />
i<br />
F<br />
i<br />
X<br />
Wankwinkel ϕ<br />
Θ<br />
i<br />
⋅ ϕ&&<br />
i<br />
=<br />
Z<br />
Gierwinkel Ψ<br />
∑<br />
i<br />
Nickwinkel ϑ<br />
Y<br />
Lenkwinkel δ<br />
M<br />
i<br />
Fahrzeugmodell mit 15 Freiheitsgraden<br />
ZA<br />
l AV<br />
Z A<br />
l Ah<br />
s/2<br />
s/2<br />
Y A<br />
Z R1(3)<br />
Y R1(3)<br />
hWP<br />
m A<br />
yWP<br />
C A k A<br />
A<br />
Y R2(4)<br />
X m<br />
A<br />
C A k A<br />
C A<br />
k A<br />
Z X<br />
X R1(2) R3(4)<br />
R1(2)<br />
Z R3(4)<br />
Z R2(4)<br />
h Nick<br />
1el0016.ppt
Implementierung der BMW Achse<br />
Einbindung der spezifischen Achskennwerte über S-Funktionen<br />
BMW 318i Achsvermessung<br />
Achsidentifikation<br />
Mathematische Abbildung<br />
der BMW Achsen<br />
Spurwinkel, Sturzwinkel = f (Längskraft, Seitenkraft, Federweg)<br />
Radlast = f (Federweg)<br />
Nickwinkel = f (Federweg)<br />
Wankpolkoordinaten z,y = f (Federweg r, Federweg l)<br />
0el0378.ppt<br />
1el0016.ppt
Versuchsfahrzeug mit Messtechnik<br />
Um die Reaktionen des Fahrzeugs nach Durchführung von<br />
Fahrversuchen analysieren und mit der Simulation vergleichen<br />
zu können, wurde ein Versuchsfahrzeug mit Messtechnik<br />
ausgerüstet. Folgende Größen wurden aufgenommen:<br />
S-CE Correvit<br />
Längs- und Quergeschwindigkeit (v l<br />
, v q<br />
)<br />
Beschleunigungen in x-, y- und z-Richtung (a x<br />
, a y<br />
,a z<br />
)<br />
Wank-, Nick- und Gierwinkel (α x<br />
, α y<br />
, α z<br />
)<br />
Wank-, Nick- und Gierwinkelgeschwindigkeit (ω x<br />
, ω y<br />
, ω z<br />
)<br />
RMS Plattform<br />
DATRON Messlenkrad<br />
Lenkwinkel und -moment (δ h<br />
, M h<br />
)<br />
1el0016.ppt
Fahrversuche<br />
zur Validierung des Fahrzeugsmodells<br />
Stationäre Kreisfahrt:<br />
Mit der stationären Kreisfahrt untersucht man das<br />
Eigenlenkverhalten des Fahrzeugs<br />
Open-Loop-Manöver (fahrerunabhängiges Manöver):<br />
Gewonnene Messergebnisse eignen sich gut als<br />
Referenzgrößen zur qualitativen Beurteilung des Fahrzeugmodells<br />
Die Durchführung des Fahrversuches erfolgt innerhalb mehrerer<br />
Fahrzyklen. Dabei wird das Fahrzeug auf einer Kreisbahn<br />
(r = 30 m) in einen stationären Fahrzustand gebracht<br />
Fahrzyklus:<br />
Geschwindigkeit v = 4m/s<br />
v = v + 1 m/s<br />
Geschwindigkeit > 7 m/s<br />
v = v + 0.5 m/s<br />
Überschreiten der Stabilitätsgrenze<br />
1el0016.ppt
Auswertung der Messergebnisse<br />
Lenkwinkel [°]<br />
Schwimmwinkel [°]<br />
180<br />
160<br />
140<br />
120<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
-0.5<br />
-1<br />
-1.5<br />
Meßwerte<br />
Simulation<br />
0 1 2 3 4 5 6 7 8<br />
Querbeschleunigung [m/s²]<br />
0 1 2 3 4 5 6 7 8<br />
Querbeschleunigung [m/s²]<br />
Eigenlenkverhalten:<br />
Lenkwinkel steigt bis ca. 4 m/s 2<br />
annähernd linear an und nimmt<br />
bei höheren Querbeschleunigungen<br />
progressiv zu<br />
Fahrzeug untersteuernd<br />
ausgelegt<br />
Schwimmwinkel:<br />
leicht progressiver Abfall,<br />
Fahrzeuglängsachse orientiert sich<br />
in Richtung Kreismittelpunkt und<br />
wandert nach außen<br />
(tangential ⇒ β = 0°)<br />
1el0016.ppt
Auswertung der Messergebnisse<br />
Gierrate [°/s]<br />
stat. Gierverstärkungsfaktor [°/s/°]<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
3.5<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
Meßwerte<br />
Simulation<br />
0 1 2 3 4 5 6 7 8<br />
Querbeschleunigung [m/s²]<br />
0 2 4 6 8 10 12 14 16 18<br />
v längs [m/s]<br />
Stationäre Gierverstärkung:<br />
Quotient aus der Gierrate und den<br />
eingestellten Lenkwinkel<br />
Maß für die<br />
Lenkempfindlichkeit des<br />
Fahrzeugs<br />
Die Kurve für die Lenkempfindlichkeit<br />
weist ein lokales Maximum auf<br />
(untersteuerndes Fahrzeug)<br />
Die zugehörige Fahrgeschwindigkeit<br />
wird als charakteristische<br />
Geschwindigkeit bezeichnet und<br />
beträgt ca. 13 m/s<br />
1el0016.ppt
Zusammenfassung<br />
Das Simulationsmodell bildet die Realität sehr genau ab<br />
Die Prüfstandsmessungen ermöglichen die realistische mathematische<br />
Abbildung der Radaufhängungen, um ein sehr detailgetreues<br />
Simulationsmodell mit relativ geringem Zeitaufwand aufbauen zu<br />
können<br />
Mit Hilfe des Achsidentifikationstools reduzieren sich die verschiedenen<br />
Einzelradaufhängungen auf mathematische Zusammenhänge, ohne<br />
auf geometrische Größen der Achsen, kinematische Anlenkpunkte,<br />
Bushing- und Lenkersteifigkeiten zurückgreifen zu müssen<br />
Die Identifikationsmöglichkeiten verschiedener Achsaufhängungen<br />
liefern einen Beitrag zur graphischen Analyse vorhandener<br />
Achskonzepte und zur wirtschaftlichen Weiterentwicklung von<br />
Gesamtfahrzeugkonzepten<br />
1el0016.ppt