H-206 6-Achsen-Justiersystem (PDF) - PI
H-206 6-Achsen-Justiersystem (PDF) - PI
H-206 6-Achsen-Justiersystem (PDF) - PI

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
6-<strong>Achsen</strong>-System der Referenzklasse<br />
Parallelkinematischer Aufbau für sechs Freiheitsgrade,<br />
dadurch wesentlich kompakter und steifer als Seriellkinematik-Systeme,<br />
kein Aufaddieren von Führungsfehlern der<br />
Einzelachsen. Höhere Dynamik, höhere Zuverlässigkeit.<br />
Antrieb durch DC-Motoren<br />
Festkörpergelenke und Hexapoddesign<br />
mit konstanter Beinlänge<br />
Positionierung mit höchster Präzision und Wiederholgenauigkeit<br />
Leistungsfähiger Digitalcontroller,<br />
offene Softwarearchitektur<br />
Stabiler Pivotpunkt, per Software im Raum frei wählbar.<br />
Positionsvorgabe in kartesischen Koordinaten. Makroprogrammierung.<br />
Open-Source LabVIEW-Treiber und Bibliotheken.<br />
Simulation des Arbeitsraums. Virtuelle Maschine<br />
zur Hexapodemulation. Optional: Software zur Vermeidung<br />
von Kollisionen.<br />
H-<strong>206</strong>.F11 inkl. C-887.11 6D-Controller für Hexapoden, inkl.<br />
Ansteuerung von zwei Zusatzachsen. Optionen:<br />
� Analoge Schnittstellen-/Photometerkarten für sichtbares<br />
Licht (F-<strong>206</strong>.VVU) oder für den Infrarotbereich (F-<strong>206</strong>.iiU)<br />
� F-<strong>206</strong>.NCU Schnelles Piezo-Nanojustiersystem für Justagen<br />
mit Nanometer-Präzision<br />
H-<strong>206</strong>.F12 inkl. kompaktem 6D-Controller C-887.21<br />
6-<strong>Achsen</strong>-<strong>Justiersystem</strong><br />
ideal für faserkopplung<br />
Hexapoden | www.pi.ws<br />
H-<strong>206</strong><br />
� Höchste Präzision durch<br />
Festkörpergelenke<br />
� Mit integrierten Scanalgorithmen<br />
für faseroptische Justage<br />
� Aktorauflösung 33 nm<br />
� Bidirektionale Wiederholgenauigkeit<br />
0,3 µm / 6 µrad<br />
� Kleinste Schrittweite 0,1 µm /<br />
2 µrad<br />
� Geschwindigkeit von 10 µm/s<br />
bis 10 mm/s<br />
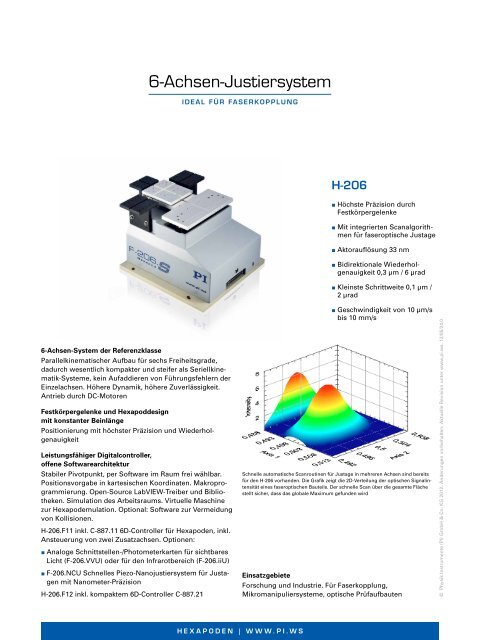
Schnelle automatische Scanroutinen für Justage in mehreren <strong>Achsen</strong> sind bereits<br />
für den H-<strong>206</strong> vorhanden. Die Grafik zeigt die 2D-Verteilung der optischen Signalintensität<br />
eines faseroptischen Bauteils. Der schnelle Scan über die gesamte Fläche<br />
stellt sicher, dass das globale Maximum gefunden wird<br />
12/05/24.0<br />
www.pi.ws. unter Revision Aktuelle vorbehalten. Änderungen 2012. KG Co. & GmbH (<strong>PI</strong>) Instrumente<br />
Einsatzgebiete<br />
Forschung und Industrie. Für Faserkopplung,<br />
Physik<br />
Mikromanipuliersysteme, optische Prüfaufbauten ©
Aktive <strong>Achsen</strong> X, Y, Z, θ X , θ Y , θ Z<br />
Bewegung und Positionieren<br />
H-<strong>206</strong>.F1x Einheit Toleranz<br />
Stellweg* X -8 bis 5,7 mm<br />
Stellweg* Y ±5,7 mm<br />
Stellweg* Z ±6,7 mm<br />
Stellweg* θ X ±5,7 °<br />
Stellweg* θ Y ±6,6 °<br />
Stellweg* θ Z ±5,5 °<br />
Rechnerische Aktorauflösung 33 nm<br />
Kleinste Schrittweite X, Y, Z 0,1 µm typ.<br />
Kleinste Schrittweite θ X , θ Y , θ Z 2 µrad (0,4“) typ.<br />
Bidirektionale Wiederholgenauigkeit X, Y, Z 0,3 µm typ.<br />
Bidirektionale Wiederholgenauigkeit θ X , θ Y , θ Z 6 µrad typ.<br />
Max. Geschwindigkeit X, Y, Z 10 mm/s<br />
Belastbarkeit (Grundplatte horizontal) 1,5 kg max.<br />
Anschlüsse und Umgebung<br />
Betriebstemperaturbereich 5 bis 35 °C<br />
Material Aluminium<br />
Masse 5,8 kg ±5 %<br />
Kabellänge 3 m ±10 mm<br />
Technische Daten werden bei 20±3 °C spezifiziert.<br />
Sonderausführungen auf Anfrage.<br />
* Die maximalen Stellwege der einzelnen Koordinaten (X, Y, Z, θ X , θ Y , θ Z ) sind voneinander abhängig. Die genannten Daten geben den maximalen Stellweg einzelner<br />
<strong>Achsen</strong> an, bei denen alle anderen <strong>Achsen</strong> und der Pivotpunkt auf Referenzposition stehen.<br />
H-<strong>206</strong>.S, Abmessungen in mm<br />
Hexapoden | www.pi.ws<br />
Der H-<strong>206</strong> Hexapod zeigt eine extrem gute Wiederholgenauigkeit<br />
kleinster Schritte, hier 0,5-µm-Schritte mit 1 kg Last in X-Richtung<br />
Linearantriebe &<br />
Aktoren<br />
Nanostelltechnik &<br />
Piezotechnologie<br />
Hexapoden<br />
Anhang Mikrostelltechnik Nanomesstechnik<br />
Parallelkinematiken