Gebrauchsanleitung WinGPS 5 Voyager - Stentec
Gebrauchsanleitung WinGPS 5 Voyager - Stentec
Gebrauchsanleitung WinGPS 5 Voyager - Stentec

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
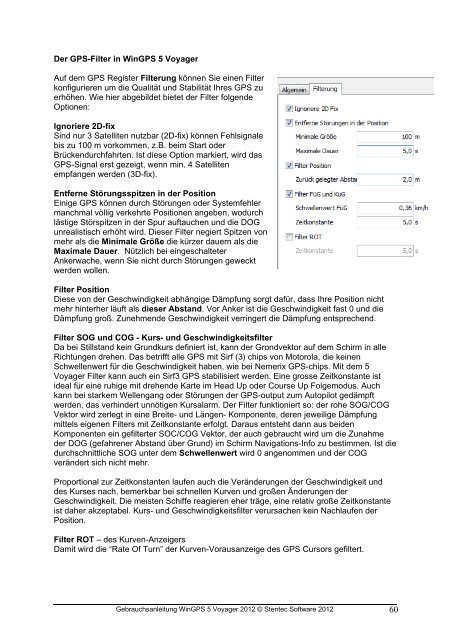
Der GPS-Filter in <strong>WinGPS</strong> 5 <strong>Voyager</strong>Auf dem GPS Register Filterung können Sie einen Filterkonfigurieren um die Qualität und Stabilität Ihres GPS zuerhöhen. Wie hier abgebildet bietet der Filter folgendeOptionen:Ignoriere 2D-fixSind nur 3 Satelliten nutzbar (2D-fix) können Fehlsignalebis zu 100 m vorkommen, z.B. beim Start oderBrückendurchfahrten. Ist diese Option markiert, wird dasGPS-Signal erst gezeigt, wenn min. 4 Satellitenempfangen werden (3D-fix).Entferne Störungsspitzen in der PositionEinige GPS können durch Störungen oder Systemfehlermanchmal völlig verkehrte Positionen angeben, wodurchlästige Störspitzen in der Spur auftauchen und die DOGunrealistisch erhöht wird. Dieser Filter negiert Spitzen vonmehr als die Minimale Größe die kürzer dauern als dieMaximale Dauer. Nützlich bei eingeschalteterAnkerwache, wenn Sie nicht durch Störungen gewecktwerden wollen.Filter PositionDiese von der Geschwindigkeit abhängige Dämpfung sorgt dafür, dass Ihre Position nichtmehr hinterher läuft als dieser Abstand. Vor Anker ist die Geschwindigkeit fast 0 und dieDämpfung groß. Zunehmende Geschwindigkeit verringert die Dämpfung entsprechend.Filter SOG und COG - Kurs- und GeschwindigkeitsfilterDa bei Stillstand kein Grundkurs definiert ist, kann der Grondvektor auf dem Schirm in alleRichtungen drehen. Das betrifft alle GPS mit Sirf (3) chips von Motorola, die keinenSchwellenwert für die Geschwindigkeit haben, wie bei Nemerix GPS-chips. Mit dem 5<strong>Voyager</strong> Filter kann auch ein Sirf3 GPS stabilisiert werden. Eine grosse Zeitkonstante istideal für eine ruhige mit drehende Karte im Head Up oder Course Up Folgemodus. Auchkann bei starkem Wellengang oder Störungen der GPS-output zum Autopilot gedämpftwerden, das verhindert unnötigen Kursalarm. Der Filter funktioniert so: der rohe SOG/COGVektor wird zerlegt in eine Breite- und Längen- Komponente, deren jeweilige Dämpfungmittels eigenen Filters mit Zeitkonstante erfolgt. Daraus entsteht dann aus beidenKomponenten ein gefilterter SOC/COG Vektor, der auch gebraucht wird um die Zunahmeder DOG (gefahrener Abstand über Grund) im Schirm Navigations-Info zu bestimmen. Ist diedurchschnittliche SOG unter dem Schwellenwert wird 0 angenommen und der COGverändert sich nicht mehr.Proportional zur Zeitkonstanten laufen auch die Veränderungen der Geschwindigkeit unddes Kurses nach, bemerkbar bei schnellen Kurven und großen Änderungen derGeschwindigkeit. Die meisten Schiffe reagieren eher träge, eine relativ große Zeitkonstanteist daher akzeptabel. Kurs- und Geschwindigkeitsfilter verursachen kein Nachlaufen derPosition.Filter ROT – des Kurven-AnzeigersDamit wird die “Rate Of Turn” der Kurven-Vorausanzeige des GPS Cursors gefiltert.<strong>Gebrauchsanleitung</strong> <strong>WinGPS</strong> 5 <strong>Voyager</strong> 2012 © <strong>Stentec</strong> Software 2012 60