VW Phaeton: - drei Bussysteme (Antrieb, Komfort, Info), ein optischer ...
VW Phaeton: - drei Bussysteme (Antrieb, Komfort, Info), ein optischer ...
VW Phaeton: - drei Bussysteme (Antrieb, Komfort, Info), ein optischer ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Bild 2.7_1 Quelle: <strong>VW</strong><br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_2<br />
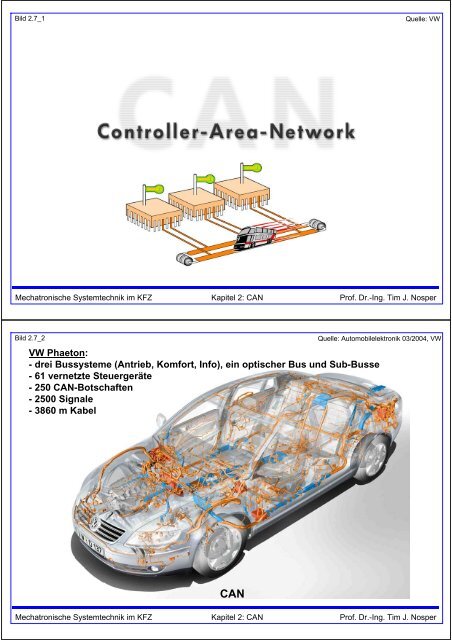
<strong>VW</strong> <strong>Phaeton</strong>:<br />
- <strong>drei</strong> <strong>Bussysteme</strong> (<strong>Antrieb</strong>, <strong>Komfort</strong>, <strong>Info</strong>), <strong>ein</strong> <strong>optischer</strong> Bus und Sub-Busse<br />
- 61 vernetzte Steuergeräte<br />
- 250 CAN-Botschaften<br />
- 2500 Signale<br />
- 3860 m Kabel<br />
CAN<br />
Quelle: Automobilelektronik 03/2004, <strong>VW</strong><br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_3<br />
Controller Area Network (CAN) ist <strong>ein</strong> serielles Bussystem, welches von Intel und Bosch<br />
ursprünglich für den Einsatz in Automobilen entwickelt wurde.<br />
Netz-Struktur Bus-Struktur<br />
• Vermaschtes Netz<br />
• Punkt-zu-Punkt-Verbindungen<br />
• Viele Signalwege und dicke Kabel<br />
• Hohe Kosten und Fehleranfälligkeit<br />
• Serielles System<br />
• Kurze Stichleitungen<br />
• Ver<strong>ein</strong>fachte Verdrahtung<br />
• Strenge Kommunikationsregeln erforderlich!<br />
Controller Area Network (CAN)<br />
Quelle: Bosch<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_4<br />
CAN- Controller Area Network<br />
• Der CAN-Bus ist <strong>ein</strong> serielles Bussystem, bei dem alle Teilnehmer gleichberechtigt<br />
sind, d.h. jedes Steuergerät kann unabhängig senden und empfangen.<br />
• CAN adressiert im Gegensatz zu anderen Protokollen nicht die Teilnehmer, sondern die<br />
übermittelte Nachricht. Der Teilnehmer entscheidet, ob er die Daten benötigt oder nicht.<br />
1983 Beginn der Entwicklung des CAN- Protokolls bei Bosch<br />
1987 Der erste CAN-Serienchip von INTEL ist verfügbar<br />
1992 Erste Serienanwendung (Mercedes S- Klasse)<br />
1993 Internationale Normung als ISO 11898<br />
1995 Über 3 Millionen CAN-<strong>Bussysteme</strong> im Kfz-Bereich<br />
CAN- Bus Entwicklung<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_5<br />
Automatikgetriebe-<br />
Steuergerät<br />
ABS/EDS-Steuergerät<br />
Motor-Steuergerät 11<br />
22<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_6<br />
Netzknoten: Besteht aus <strong>ein</strong>em Mikro-<br />
Kontroller, CAN-Kontroller und Bustreiber<br />
Mikrokontroller: Steuert den CAN-<br />
Kontroller und bearbeitet Sende- und<br />
Empfangsdaten<br />
CAN-Kontroller: Ist verantwortlich für den<br />
Sende- und Empfangsbetrieb<br />
Bustreiber: Senden bzw. Empfangen des<br />
Buspegel<br />
Busleitung: Zweidrahtleitung (verdrillt oder<br />
abgeschirmt)<br />
Busabschluss: Widerstände zur<br />
Vermeidung von Reflexionen.<br />
CAN Bus Prioritätenfolge<br />
Übertragungssystem<br />
33<br />
Quelle: <strong>VW</strong><br />
Quelle: Audi<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_7<br />
CAN - Buspegel<br />
Quelle: Bosch<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_8<br />
Dominant<br />
logisch 0<br />
Rezessiv<br />
logisch 1<br />
CAN-High<br />
CAN-Low<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
0 Volt<br />
Logik CAN-High CAN-Low Differenzpegel<br />
Rezessive 1 2,5 Volt 2,5 Volt 0 Volt<br />
Dominant 0 3,5 Volt 1,5 Volt 2 Volt<br />
CAN – Buspegel Messung<br />
Quelle: Audi
Bild 2.7_9<br />
1. Daten bereitstellen<br />
Die Daten werden dem CAN-Controller vom<br />
Steuergerät zum Senden bereitgestellt.<br />
2. Daten senden<br />
Der CAN-Transceiver bekommt vom CAN-<br />
Controller die Daten, wandelt sie in elektrische<br />
Signale um und sendet sie.<br />
3. Daten empfangen<br />
Alle anderen Steuergeräte, die mit dem CAN-<br />
Datenbus vernetzt sind, werden zu Empfängern.<br />
4. Daten prüfen<br />
Die Steuergeräte prüfen, ob sie die empfangenen<br />
Daten für ihre Funktionen benötigen oder nicht.<br />
Steuergerät 1 Steuergerät 2 Steuergerät 3 Steuergerät 4<br />
Daten<br />
übernehmen<br />
Daten<br />
prüfen<br />
Daten<br />
empfangen<br />
5. Daten übernehmen<br />
Sind die Daten wichtig, werden sie übernommen und<br />
verarbeitet, ansonsten vernachlässigt.<br />
Daten<br />
bereitstellen<br />
Datenbus-Leitung<br />
Daten<br />
übernehmen<br />
Daten<br />
prüfen<br />
Daten<br />
empfangen<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_10<br />
0<br />
001 011 011 01<br />
Identifier:<br />
Identifier:<br />
Inhalt<br />
Inhalt<br />
der<br />
der<br />
Botschaft<br />
Botschaft<br />
für<br />
für<br />
die<br />
die<br />
Akzeptanzprüfung<br />
Akzeptanzprüfung<br />
11 11 bit bit<br />
Remote Transmission<br />
Remote Transmission<br />
Request<br />
Request<br />
(RTR):<br />
(RTR):<br />
Datafield (0) oder<br />
Datafield (0) oder<br />
Remotefield (1)<br />
Remotefield (1)<br />
0<br />
1 bit bit<br />
001 011<br />
Daten<br />
senden<br />
Ablauf <strong>ein</strong>er Datenübertragung<br />
Data Field:<br />
Data Field:<br />
<strong>Info</strong>daten<br />
<strong>Info</strong>daten<br />
0- 0-64 64 bit bit<br />
001 011 011 011 111 011 111 101 000 111 00<br />
011 001 111 111 011 111 101 000 111 001 11<br />
Control<br />
Control<br />
Field:<br />
Field:<br />
IDE-Bit: CAN 2.0A<br />
IDE-Bit: CAN 2.0A<br />
oder B<br />
oder B<br />
R0: reserviert<br />
R0: reserviert<br />
DLC: Länge<br />
DLC: Länge<br />
Nachricht<br />
Nachricht<br />
6 bit bit<br />
Daten<br />
prüfen<br />
Daten<br />
empfangen<br />
Start of Frame Identifier Kontrolle Dateninhalt Checksumme Empfangstempel Ende<br />
Start of Frame:<br />
Start of Frame:<br />
Markiert<br />
Markiert<br />
den<br />
den<br />
Anfang<br />
Anfang<br />
<strong>ein</strong>er<br />
<strong>ein</strong>er<br />
Botschaft.<br />
Botschaft.<br />
1 bit bit<br />
Acknowledgement Field:<br />
Acknowledgement Field:<br />
Bestätigt ob Botschaft fehlerfrei<br />
Bestätigt ob Botschaft fehlerfrei<br />
empfangen wurde<br />
empfangen wurde<br />
ACK Bit: 0= korrekter Empfang<br />
ACK Bit: 0= korrekter Empfang<br />
ACK Delimiter: 1 rezessives Bit<br />
ACK Delimiter: 1 rezessives Bit<br />
001 011 111 011<br />
111<br />
Cyclic<br />
Cyclic<br />
Redundancy<br />
Redundancy<br />
Check:<br />
Check:<br />
15 15 bit bit<br />
Aufbau Datenprotokoll<br />
2 bit bit<br />
Quelle: Audi<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
01<br />
1111111<br />
End<br />
End<br />
of<br />
of<br />
Frame:<br />
Frame:<br />
Markiert das Ende <strong>ein</strong>er<br />
Markiert das Ende <strong>ein</strong>er<br />
Botschaft.<br />
Botschaft.<br />
7 bit bit<br />
Quelle: Vw
Bild 2.7_11<br />
Standard CAN Format (CAN 2.0 A)<br />
Extended CAN Format (CAN 2.0 B)<br />
Botschaftsrahmen<br />
Quelle: Braess<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_12<br />
000100000 00000 00011111 11111 0000 00011010010011011000110111010111 SOF<br />
RTR<br />
Identifier Control Daten CRC-Feld<br />
Aufgabe: Auswerten folgender Botschaft<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Delimiter<br />
Delimiter
Bild 2.7_13<br />
0001 00000 00000 0001 1 1 11 1 1111 0000 00011 01001 0011 011 000 1101 11 010111 SOF<br />
RTR<br />
CAN Datenverkehr: Auswertung<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_14<br />
1 0 0 0 3 FF 01 A4 6 C 6 E<br />
Netzknoten 1<br />
Netzknoten 2<br />
Netzknoten 3<br />
Buspegel<br />
Identifier Control Daten CRC-Feld<br />
rezessiv<br />
dominant<br />
S<br />
O<br />
F<br />
Identifier<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Arbitrierungsverfahren<br />
Control<br />
Field<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
R<br />
T<br />
R<br />
listen<br />
listen<br />
Delimiter<br />
Data<br />
Field<br />
Delimiter<br />
Quelle: Bosch
Bild 2.7_15<br />
NRZ<br />
PWM<br />
None Return to Zero<br />
Manchester<br />
Pulsweitenmoduliert<br />
0 1 0 0 0 1 1 1 0<br />
Methoden der Bitcodierung<br />
Quelle: Audi<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_16<br />
Stuff = Stopfen > Stuffingregel<br />
NRZ > Vorteil: geringere Frequenz < 50% als bei anderen Bitcodierungen<br />
Nachteil: fehlende Synchronisierung bei vielen gleiche Bits hinter<strong>ein</strong>ander<br />
Abhilfe: Einstopfen <strong>ein</strong>es invertierten Synchronisierbits nach <strong>ein</strong>em 5. gleichen Bit.<br />
Empfänger filtert <strong>ein</strong>gestopfte Bits wieder heraus.<br />
Bit-Stuffing<br />
Quelle: Audi<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_17 Quelle: Audi<br />
Bit-Stuffing<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_18<br />
- Low Speed - CAN (ISO11519-2) mit Bitraten < 125 kBit/s<br />
- High Speed - CAN (ISO11898) mit Bitraten > 125 kBit/s<br />
- Minimale Datenrate = 10 kBit/s<br />
- Maximale Datenrate = 1 MBit/s (max. 40 m Leitungslänge)<br />
- Zweidrahtleitung<br />
- Terminierung mit 120 Ω Abschlusswiderstand<br />
- Maximale 32 Busteilnehmer<br />
- Standard CAN Format (CAN 2.0 A)<br />
- Extended CAN Format (CAN 2.0 B)<br />
Fakten und Eigenschaften CAN<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_19<br />
Reduzierung Gewicht/Volumen<br />
- Weniger Leitungen<br />
- Teilw . dünnere Leitungen<br />
- Unterbringung wo Platz ist<br />
- Mehr Funktionalität<br />
pro Leitung<br />
Qualitätssteigerung<br />
- Weniger Steckkontakte<br />
- 100% diagnostizierbar<br />
- Verbesserung EMV<br />
bei optischem Bus<br />
Reduzierung Montagezeit<br />
- Unterstützung Modulbauweise<br />
(z.B. Lenksäulenmodul<br />
5 Arbeitsschritte → 2)<br />
- Modultests dezentral<br />
Kosten<strong>ein</strong>sparung<br />
- weniger Leitungen<br />
- Mehrfachnutzung Sensorik<br />
- Ausnutzung von Restkapazitäten in<br />
Steuergeräten durch verteilte Funktionen<br />
Bus<br />
Steigerung Flexibilität,<br />
Erweiterungsfähigkeit<br />
- Änderungen durch Software<br />
- Teilweise Plug & Play<br />
- Verteilung von Funktionen<br />
auf Steuergeräte<br />
Vorteile von <strong>Bussysteme</strong>n<br />
neue Möglichkeiten<br />
- Integriertes Bedienkonzept<br />
- Sprachbedienung<br />
- Animierte Bedienungsanleitung<br />
- Fahrzeugferndiagnose<br />
- Unfallvermeidendes Fahrzeug<br />
- <strong>Komfort</strong>funktionen<br />
(z. B. keyless entry)<br />
- Software Updates<br />
- erweiterte Diagnosemöglichkeiten<br />
Quelle: Audi<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_20<br />
• Im <strong>Antrieb</strong>sstrang:<br />
– Bei der <strong>Antrieb</strong>sschlupfregelung sind die Eingriffe in die Zündung, die<br />
Einspritzung und die Drosselklappenstellung zu koordinieren.<br />
• In der mobilen Kommunikation:<br />
– Vernetzung von Mulitmedia-Komponenten wie Autoradio, Telefon, CD-<br />
Wechsler, Navigations- und Fahrerinformations-systemen etc.<br />
• Im Karosserie- und <strong>Komfort</strong>bereich:<br />
– Anzeigen, Beleuchtung, Zugangsberechtigungen, Diebstahlwarn<strong>ein</strong>richtungen,<br />
Sitz- und Spiegelverstellung, Klimaregelung,<br />
Scheibenwischer etc.<br />
CAN-Kfz-Anwendungen<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_21<br />
Personen- und Lastkraftwagen<br />
- Motorsteuerungen<br />
-Sensoren<br />
- Aktoren<br />
- Entertainment<br />
Industrie und Automatisierung<br />
- Maschinensteuerung<br />
- Robotersteuerung<br />
- Überwachungssysteme<br />
Embedded Systems<br />
- Haushaltsgeräte<br />
- Kassensysteme<br />
- Spielautomaten<br />
- Büromaschinen<br />
Öffentliches Verkehrs- und Transportwesen<br />
- Personenbeförderung und Güterverkehr<br />
- Signalüberwachung und Signalsteuerung<br />
- Fahrgast - <strong>Info</strong>rmations - Systeme<br />
Haus- und Energietechnik<br />
- Fahrstuhl - Kontrollsysteme<br />
- Markisensteuerung bei Sonnen<strong>ein</strong>strahlung<br />
- Klimatisierungsautomatik<br />
- Raum/Temperatur - Regelung<br />
- Lichtanlagen - Regelung<br />
Einsatzgebiete CAN<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_22<br />
CAN Architektur<br />
Quelle: Bosch<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_23<br />
Tx =<br />
Sendemodul<br />
Steuergerät<br />
CAN Controller<br />
Transceiver<br />
TX RX<br />
CAN Komponenten<br />
Rx =<br />
Empfangsmodul<br />
Quelle: <strong>VW</strong><br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_24<br />
CAN Bus Datenleitung<br />
<strong>Antrieb</strong><br />
<strong>Komfort</strong><br />
<strong>Info</strong>tainment<br />
CAN Diagnose<br />
Kombi<br />
CAN Low<br />
CAN High<br />
orange/braun<br />
orange/braun<br />
orange/schwarz<br />
orange/braun<br />
orange/grün<br />
orange/violett<br />
orange/braun<br />
orange/rot<br />
orange/braun<br />
orange/blau<br />
CAN Farbcodierungen<br />
Quelle: <strong>VW</strong><br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_25<br />
CAN Software<br />
Quelle: Vector, Ixxat<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_26<br />
Verknüpfung mit D3 Richtungsblinken.exe.lnk<br />
Blinkeransteuerung via CAN<br />
Quelle: Audi<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_27<br />
Aufgaben des Gateway im<br />
Schalttafel<strong>ein</strong>satz<br />
Datenaustausch zwischen<br />
- CAN - <strong>Antrieb</strong><br />
- CAN - <strong>Komfort</strong><br />
- CAN - <strong>Info</strong>tainment<br />
CAN – Datenbusvernetzung: Gateway im Schalttafel<strong>ein</strong>satz<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_28<br />
Die Aufgabe des Vernetzungsgateway besteht im wesentlichen darin, die<br />
Schnittstelle zwischen den verschiedenen <strong>Bussysteme</strong>n im Fahrzeug darzustellen,<br />
d.h. <strong>ein</strong>e Kommunikation zwischen den Steuergeräten in den verschiedenen<br />
<strong>Bussysteme</strong>n zu ermöglichen. Der Datendurchsatz im Vernetzungsgateway muss<br />
mit geringsten Laufzeiten und ohne Datenverlust sichergestellt werden.<br />
Bisher war das Gateway im Kombi verbaut.<br />
Schnittstellen:<br />
Diagnose- CAN 500 kbps<br />
<strong>Antrieb</strong>s- CAN 500 kbps Gateway<br />
E- CAN 500 kbps<br />
(M-Ausstattung)<br />
Gateway<br />
Kombi- CAN 500 kbps<br />
<strong>Komfort</strong>- CAN 100 kbps<br />
<strong>Info</strong>tainment- CAN<br />
100 kbps<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_29<br />
In der Spezifikation des CAN-Bus ist die negative Logik festgelegt worden<br />
Zustand mit Wert<br />
� Transceiver geschlossen<br />
� Spannung auf Datenleitung<br />
ca. 2 V bzw. 3 V im <strong>Komfort</strong>bus<br />
ca. 1,5 bzw. 3,5 V im <strong>Antrieb</strong>sbus<br />
Dominantes Signal<br />
� Schalter<br />
geschlossen<br />
� Lampe<br />
leuchtet nicht<br />
Zustand mit Wert<br />
Negative Logik<br />
� Transceiver geöffnet<br />
� Spannung auf Datenleitung<br />
ca. 0 V bzw. 5 V im <strong>Komfort</strong>bus<br />
ca. 2,5 V im <strong>Antrieb</strong>sbus<br />
Rezessives Signal<br />
� Schalter geöffnet<br />
� Lampe leuchtet<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_30<br />
CAN-Bus<br />
0-Dominanz<br />
5 Volt<br />
0 Volt<br />
Am CAN-Datenbussystem sind immer mehrere<br />
Steuergeräte angeschlossen.<br />
Nur wenn alle Steuergeräte <strong>ein</strong> „1“-Bit senden ist die<br />
<strong>Info</strong>rmation auf dem Bus logisch „1“.<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
5 Volt<br />
0 Volt<br />
Sendet mindestens <strong>ein</strong> Steuergerät <strong>ein</strong> „0“-Bit, so ist das<br />
Signal auf der Busleitung logisch „0“.<br />
Die „0“-<strong>Info</strong>rmation des <strong>ein</strong>en Steuergeräts überschreibt<br />
die „1“-<strong>Info</strong>rmation der anderen Steuergeräte.<br />
�Das „0“-Bit ist dominant<br />
�Das „1“-Bit ist rezessiv<br />
Negative Logik
Bild 2.7_31 CAN-Bus<br />
Datenrate (Bit/s)<br />
25M<br />
10M<br />
1M<br />
20K<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_32 CAN-Bus<br />
CAN<br />
Zweidrahtbus<br />
TTx<br />
Flexray<br />
MOST<br />
<strong>optischer</strong> Ring<br />
0,5 1,0<br />
2,5<br />
5,0<br />
Übersicht der gängigen <strong>Bussysteme</strong><br />
Relative<br />
Kosten pro<br />
Busknoten<br />
Spezifikation 1999 1983<br />
1999<br />
Rel. Kosten/Knoten Gering (~1€) Mittel (~2€) Hoch (~5€)<br />
Medium Ein-Draht Zwei-Draht Lichtwellenleiter<br />
Übertragungsrate Bis 20 KBit/s Bis 1 MBit/s Bis 22,5 MBit/s<br />
Datenmenge gering mittel hoch<br />
Bus-Zugriff Master/Slave Multi-Master Master/Slave<br />
Buszugriff asynchron asynchron synchron und<br />
asynchron<br />
Anzahl Teilnehmer Master + 16 Slaves<br />
Datensicherheit<br />
(empfohlen)<br />
Parity-Bits<br />
Checksumme (CRC)<br />
Nicht definiert<br />
(abhängig von Schnittstellenbaust<strong>ein</strong>en)<br />
Bit-Fehler, Formatfehler,<br />
Stuff-Fehler, ACK-Fehler,<br />
CRC-Fehler<br />
Vergleich verschiedener <strong>Bussysteme</strong><br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
(€)<br />
Max. 64<br />
Checksumme (CRC)
Bild 2.7_33<br />
Motor<br />
LM-Sch<strong>ein</strong>werfer<br />
UGDO<br />
Frischluftgebläse<br />
PTC-<br />
Heizung<br />
ACC<br />
Klima<br />
EZS<br />
Kombi<br />
LM-Sch<strong>ein</strong>werfer<br />
ESP<br />
Standheizung<br />
CAN - <strong>Antrieb</strong><br />
CAN - <strong>Komfort</strong><br />
Advanced Key<br />
AAS<br />
RDK<br />
AFS - CAN<br />
ESP - CAN<br />
LWR<br />
Gateway<br />
FBS-Bus<br />
ILM -<br />
BF<br />
Headunit(MMI)<br />
CDC<br />
LIN - Klima<br />
LIN - RDK<br />
Multifunktion<br />
WWS<br />
SMLS<br />
Antenne RDK<br />
ILM-<br />
Fahrer<br />
CAN - Kombi<br />
ELV Telefon/<br />
Telematik<br />
CAN - Abstandsregelung<br />
Sitzmemory<br />
Airbag<br />
Subbussysteme<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
TSG<br />
MFL<br />
LIN<br />
MOST<br />
TSG<br />
C6 - Vernetzung<br />
E-Rücksitz<br />
Duosensor(ESP)<br />
APS<br />
Antenne RDK<br />
Anhänger<br />
EPB<br />
DSP<br />
Quelle: Audi<br />
ILM hinten<br />
FZH<br />
Navi<br />
BEM<br />
DAB<br />
K-Box<br />
TV-Tuner<br />
Bild 2.7_34 Quelle: Audi<br />
CAN Architektur Audi A8<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_35<br />
Strang Stern<br />
CAN Bus Versionen<br />
Ring<br />
Lichtwellenleiter<br />
Quelle: <strong>VW</strong><br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_36<br />
Datenübertragung mit Hilfe von modulierten Lichtwellen<br />
• geringerer Leitungsbedarf<br />
• geringeres Gewicht<br />
• feste Taktfrequenz (44,1kHz wie bei digitalen Audiogeräten)<br />
ermöglicht die Übertragung synchroner Daten<br />
• dadurch höhere Datenübertragungsrate (bis zu 21 Mbit / Sekunde)<br />
• mit Hilfe der Signalcodierung können verschiedene Anwendungen in<br />
<strong>ein</strong>em Datenring zusammengeschlossen werden<br />
• k<strong>ein</strong>e Probleme durch elektromagnetische Einflüsse<br />
• ebenso k<strong>ein</strong>e elektromagnetische Störquelle<br />
Ton<br />
Video<br />
CAN<br />
Sound System<br />
MOST<br />
MOST Datenbus<br />
TV-Tuner<br />
Display<br />
Quelle: Audi<br />
Bedien<strong>ein</strong>heit<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_37<br />
Totalreflexion<br />
Optisch dichteres Medium<br />
Optisch dünneres Medium<br />
Radius > 25mm<br />
Optische Datenübertragung<br />
Radius < 25mm<br />
Totalreflexion von optisch dichterem zu<br />
optisch dünnerem Medium!<br />
Quelle: Audi<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_38<br />
• Jedes Steuergerät besitzt <strong>ein</strong>en eigenen<br />
binären Adresscode (Identifier)<br />
• Jedes Steuergerät sendet die Daten in<br />
<strong>ein</strong>er Richtung zum nächsten Steuergerät<br />
• Dieses Weitersenden wird solange<br />
fortgesetzt, bis das „Autoren“-Steuergerät<br />
die Nachricht wieder empfängt<br />
→ geschlossener Ring<br />
Steuergerät für<br />
<strong>Info</strong>rmation vorn<br />
Diagnose Interface<br />
für Datenbus<br />
(Gateway)<br />
Diagnose-<br />
Anschluss<br />
Kartenleser<br />
CD-Wechsler Telematik<br />
Navigation<br />
Display<br />
Bedien<strong>ein</strong>heit<br />
Aufbau und Ringstruktur<br />
Verstärker<br />
TV-Tuner<br />
Radio-Tuner<br />
Sprachbedienung<br />
Quelle: Audi<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_39<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_40<br />
• Alle Steuergeräte befinden sich innerhalb <strong>ein</strong>es begrenzten<br />
Bauraumes (lokales System).<br />
• Der Datenaustausch zwischen den <strong>ein</strong>zelnen LIN-<strong>Bussysteme</strong>n<br />
in <strong>ein</strong>em Fahrzeug erfolgt über jeweils <strong>ein</strong> Steuergerät durch<br />
den CAN-Datenbus.<br />
• Das System ermöglicht den Datenaustausch zwischen <strong>ein</strong>em<br />
LIN-Master-Steuergerät und bis zu 16 LIN-Slave-Steuergeräten.<br />
• Beim LIN-Bus handelt es sich um <strong>ein</strong>en Eindraht-Bus.<br />
Der Leitungsquerschnitt beträgt 0,35 mm².<br />
Eine Abschirmung ist nicht erforderlich.<br />
• Die Datenübertragungsrate beträgt 1 bis 20 Kbit/s.<br />
Eigenschaften LIN<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_41<br />
Wischersystem<br />
Schalter Frontwischer<br />
Schalter Heckwischer<br />
Empf. / Intervall<br />
Schaltmodul<br />
Lenksäule<br />
SMLS<br />
Heckwischer<br />
M<br />
Dual-<br />
Pumpe<br />
M<br />
M<br />
Wischer<br />
vorne<br />
Bordnetz<br />
Stg.<br />
Regensensor<br />
Gateway<br />
Stg.<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_42<br />
Hochdruckpumpe<br />
M<br />
Motorhaube Heckklappe<br />
Beispiel LIN<br />
<strong>Komfort</strong><br />
Stg.<br />
Standardisiertes Kurzstrecken Funksystem<br />
Bluetooth<br />
ABS<br />
Stg.<br />
Quelle: Audi<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
V
Bild 2.7_43<br />
2,45 GHz Frequenzband (lizenzfrei)<br />
Antenne, Steuerung und Verschlüsselung<br />
(128-Bit-Schlüssel) und Sende- und<br />
Empfangstechnik sind <strong>ein</strong> <strong>ein</strong>em Modul integriert.<br />
Damit Bluetooth-Geräte <strong>ein</strong>e Verbindung<br />
aufbauen können, müssen sie angelernt werden. Der<br />
Verbindungsaufbau erfolgt anschließend automatisch.<br />
Maximal acht aktive Bluetooth-Geräte bilden <strong>ein</strong> Piconet.<br />
Ein Gerät im Piconet übernimmt die Master-Funktion.<br />
Jedes Gerät hat <strong>ein</strong>e weltweit <strong>ein</strong>malige 48-Bit-lange Adresse, das<br />
ermöglicht weltweit 281 281 Billionen Geräte identifizieren!<br />
Bluetooth Aufbau<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper<br />
Bild 2.7_44<br />
6000<br />
5000<br />
4000<br />
3000<br />
2000<br />
1000<br />
0<br />
500 100 100 20<br />
6000<br />
1000<br />
Datenübertragungsraten<br />
CAN-<strong>Antrieb</strong><br />
CAN-<strong>Komfort</strong><br />
CAN-<br />
<strong>Info</strong>tainment<br />
lin<br />
MOST<br />
Bluetooth<br />
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper