
Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
[FAIL SAFE]<br />
<strong>Funktions</strong>-<strong>Rotation</strong><br />
Fail Safe<br />
Hinweis:<br />
Diese Option steht nur zur Verfügung, wenn Sie den<br />
Sender in der Modulationsart SPCM betreiben, siehe<br />
Menü [MODULATION] der System-<strong>Rotation</strong>, Seite 35.<br />
Die SPCM20-Übertragungsart betrifft alle Empfänger<br />
mit „smc“ in der Typenbezeichnung (R330 SPCM 40 S;<br />
smc-19; smc-19 DS; smc-20; smc-20 DS; smc-20 DSYN<br />
usw.).<br />
� nächstes Menü<br />
� vorheriges Menü<br />
auswählen<br />
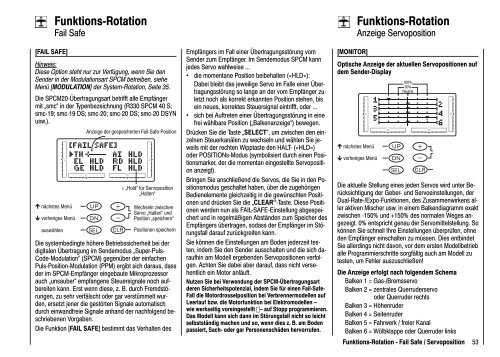
Anzeige der gespeicherten Fail-Safe-Position<br />
= „Hold“ für Servoposition<br />
„Halten“<br />
Wechseln zwischen<br />
Servo „Halten“ und<br />
Position „speichern“<br />
Positionen speichern<br />
Die systembedingte höhere Betriebssicherheit bei der<br />
digitalen Übertragung im Sendemodus „Super-Puls-<br />
Code-Modulation“ (SPCM) gegenüber der einfachen<br />
Puls-Position-Modulation (PPM) ergibt sich daraus, dass<br />
der im SPCM-Empfänger eingebaute Mikroprozessor<br />
auch „unsauber“ empfangene Steuersignale noch aufbereiten<br />
kann. Erst wenn diese, z. B. durch Fremdstörungen,<br />
zu sehr verfälscht oder gar verstümmelt wurden,<br />
ersetzt jener die gestörten Signale automatisch<br />
durch einwandfreie Signale anhand der nachfolgend beschriebenen<br />
Vorgaben.<br />
Die Funktion [FAIL SAFE] bestimmt das Verhalten des<br />
Empfängers im Fall einer Übertragungsstörung vom<br />
Sender zum Empfänger. Im Sendemodus SPCM kann<br />
jedes Servo wahlweise ...<br />
• die momentane Position beibehalten (»HLD«):<br />
Dabei bleibt das jeweilige Servo im Falle einer Übertragungsstörung<br />
so lange an der vom Empfänger zuletzt<br />
noch als korrekt erkannten Position stehen, bis<br />
ein neues, korrektes Steuersignal eintrifft, oder ...<br />
• sich bei Auftreten einer Übertragungsstörung in eine<br />
frei wählbare Position („Balkenanzeige“) bewegen.<br />
Drücken Sie die Taste „SELECT“, um zwischen den einzelnen<br />
Steuerkanälen zu wechseln und wählen Sie jeweils<br />
mit der rechten Wipptaste den HALT- (»HLD«)<br />
oder POSITIONs-Modus (symbolisiert durch einen Positionsmarker,<br />
der die momentan eingestellte Servoposition<br />
anzeigt).<br />
Bringen Sie anschließend die Servos, die Sie in den Positionsmodus<br />
geschaltet haben, über die zugehörigen<br />
Bedienelemente gleichzeitig in die gewünschten Positionen<br />
und drücken Sie die „CLEAR“-Taste. Diese Positionen<br />
werden nun als FAIL-SAFE-Einstellung abgespeichert<br />
und in regelmäßigen Abständen zum Speicher des<br />
Empfängers übertragen, sodass der Empfänger im Störungsfall<br />
darauf zurückgreifen kann.<br />
Sie können die Einstellungen am Boden jederzeit testen,<br />
indem Sie den Sender ausschalten und die sich daraufhin<br />
am Modell ergebenden Servopositionen verfolgen.<br />
Achten Sie dabei aber darauf, dass nicht versehentlich<br />
ein Motor anläuft.<br />
Nutzen Sie bei Verwendung der SPCM-Übertragungsart<br />
deren Sicherheitspotenzial, indem Sie für einen Fail-Safe-<br />
Fall die Motordrosselposition bei Verbrennermodellen auf<br />
Leerlauf bzw. die Motorfunktion bei Elektromodellen –<br />
wie werkseitig voreingestellt Đ– auf Stopp programmieren.<br />
Das Modell kann sich dann im Störungsfall nicht so leicht<br />
selbstständig machen und so, wenn dies z. B. am Boden<br />
passiert, Sach- oder gar Personenschäden hervorrufen.<br />
[MONITOR]<br />
<strong>Funktions</strong>-<strong>Rotation</strong><br />
Anzeige Servoposition<br />
Optische Anzeige der aktuellen Servopositionen auf<br />
dem Sender-Display<br />
� nächstes Menü<br />
� vorheriges Menü<br />
100%<br />
50%<br />
Neutral<br />
Die aktuelle Stellung eines jeden Servos wird unter Berücksichtigung<br />
der Geber- und Servoeinstellungen, der<br />
Dual-Rate-/Expo-Funktionen, des Zusammenwirkens aller<br />
aktiven Mischer usw. in einem Balkendiagramm exakt<br />
zwischen -150% und +150% des normalen Weges angezeigt.<br />
0% entspricht genau der Servomittelstellung. So<br />
können Sie schnell Ihre Einstellungen überprüfen, ohne<br />
den Empfänger einschalten zu müssen. Dies entbindet<br />
Sie allerdings nicht davon, vor dem ersten Modellbetrieb<br />
alle Programmierschritte sorgfältig auch am Modell zu<br />
testen, um Fehler auszuschließen!<br />
Die Anzeige erfolgt nach folgendem Schema<br />
Balken 1 = Gas-/Bremsservo<br />
Balken 2 = zentrales Querruderservo<br />
oder Querruder rechts<br />
Balken 3 = Höhenruder<br />
Balken 4 = Seitenruder<br />
Balken 5 = Fahrwerk / freier Kanal<br />
Balken 6 = Wölbklappe oder Querruder links<br />
<strong>Funktions</strong>-<strong>Rotation</strong> - Fail Safe / Servoposition<br />
53