Systemhandbuch podis - Wieland Electric
Systemhandbuch podis - Wieland Electric
Systemhandbuch podis - Wieland Electric
- Keine Tags gefunden...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
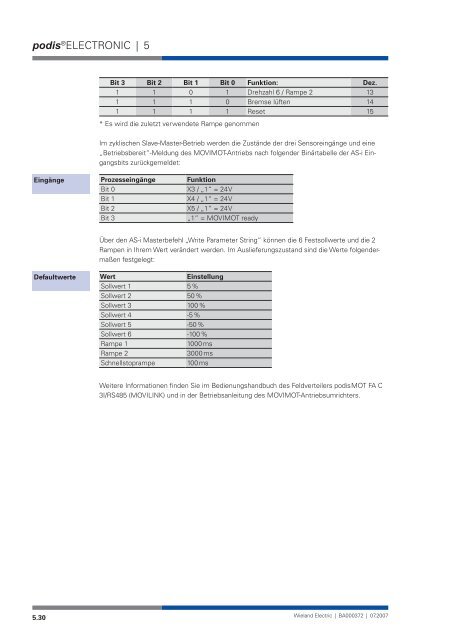
<strong>podis</strong> ® ELECTRONIC | Bit 3 Bit 2 Bit 1 Bit 0 Funktion: Dez.1 1 0 1 Drehzahl 6 / Rampe 2 131 1 1 0 Bremse lüften 141 1 1 1 Reset 15* Es wird die zuletzt verwendete Rampe genommenIm zyklischen Slave-Master-Betrieb werden die Zustände der drei Sensoreingänge und eine„Betriebsbereit“-Meldung des MOVIMOT-Antriebs nach folgender Binärtabelle der AS-i Eingangsbitszurückgemeldet:EingängeProzesseingängeBit 0Bit 1Bit 2Bit 3FunktionX3 / „1“ = 24 VX4 / „1“ = 24 VX5 / „1“ = 24 V„1“ = MOVIMOT readyÜber den AS-i Masterbefehl „Write Parameter String“ können die 6 Festsollwerte und die 2Rampen in Ihrem Wert verändert werden. Im Auslieferungszustand sind die Werte folgendermaßenfestgelegt:DefaultwerteWertEinstellungSollwert 1 5 %Sollwert 2 50 %Sollwert 3 100 %Sollwert 4 -5%Sollwert 5 -50%Sollwert 6 -100 %Rampe 11000 msRampe 23000 msSchnellstoprampe 100 msWeitere Informationen finden Sie im Bedienungshandbuch des Feldverteilers <strong>podis</strong> MOT FA C3I/RS485 (MOVILINK) und in der Betriebsanleitung des MOVIMOT-Antriebsumrichters.5.30 <strong>Wieland</strong> <strong>Electric</strong> | BA000372 | 07.2007