Systemkonzeption und Technologie moderner ... - Stiftung HAMFU
Systemkonzeption und Technologie moderner ... - Stiftung HAMFU
Systemkonzeption und Technologie moderner ... - Stiftung HAMFU

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
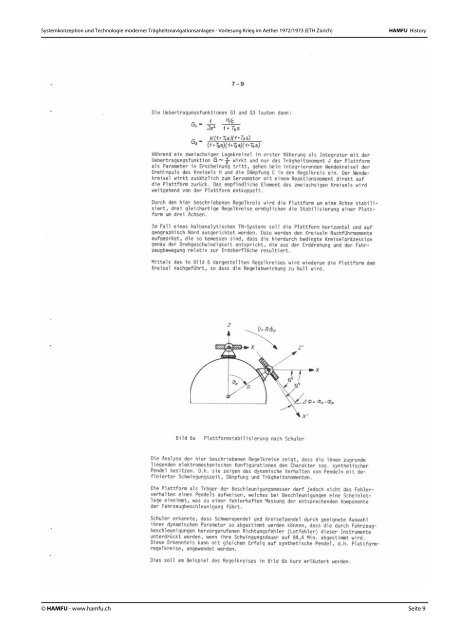
<strong>Systemkonzeption</strong> <strong>und</strong> <strong>Technologie</strong> <strong>moderner</strong> Trägheitsnavigationsanlagen - Vorlesung Krieg im Aether 1972/1973 (ETH Zürich)<strong>HAMFU</strong> HistoryDie Uebertragungsfunktionen Gl <strong>und</strong> G3 lauten dann:r1- LJs 1H /cf * T k sK(1*TiS)(1+T 3S)(1*T dS)(UT 2 S)(1^S)Während ein zweiachsiger Lagekreisel in erster Näherung als Integrator mit derUebertragungsfunktion G ~-g- wirkt <strong>und</strong> nur das Trägheitsmoment J der Plattformals Parameter in Erscheinung tritt, gehen beim integrierenden Wendekreisel derDrehimpuls des Kreisels H <strong>und</strong> die Dämpfung C in den Regelkreis ein. Der Wendekreiselwirkt zusätzlich zum Servomotor mit einem Reaktionsmoment direkt aufdie Plattform zurück. Das empfindliche Element des zweiachsigen Kreisels wirdweitgehend von der Plattform entkoppelt.Durch den hier beschriebenen Regelkreis wird die Plattform um eine Achse stabilisiert,drei gleichartige Regelkreise ermöglichen die Stabilisierung einer Plattformum drei Achsen.Im Fall eines halbanalytischen TN-Systems soll die Plattform horizontal <strong>und</strong> aufgeograph isch Nord ausgerichtet werden. Dazu werden den Kreiseln Nachführmomenteaufgeprägt, die so bemessen sind, dass die hierdurch bedingte Kreiselpräzessiongenau der Drehgeschwindigkeit entspricht, die aus der Erddrehung <strong>und</strong> der Fahrzeugbewegungrelativ zur Erdoberfläche resultiert.Mittels des i n Bild 6 dargestellten Regelkreises wird wiederum die Plattform demKreisel nachgeführt, so dass die Regelabweichung zu Null wird.ZV L < 4 0 - 0 F-, •pBild 6a Plattformstabilisierung nach SchulerDie Analyse der hier beschriebenen Regelkreise zeigt, dass die ihnen zugr<strong>und</strong>eliegenden elektromechanisehen Konfigurationen den Charakter sog. synthetischerPendel besitzen. D.h. sie zeigen das dynamische Verhalten von Pendeln mit definierterSchwingungszeit, Dämpfung <strong>und</strong> Trägheitsmomenten.Die Plattform als Träger der Beschleunigungsmesser darf jedoch nicht das Fehlerverhalteneines Pendels aufweisen, welches bei Beschleunigungen eine Scheinlotlageeinnimmt, was zu einer fehlerhaften Messung der entsprechenden Komponenteder Fahrzeugbeschleunigung führt.Schuler erkannte, dass Schwerependel <strong>und</strong> Kreiselpendel durch geeignete Auswahlihrer dynamischen Parameter so abgestimmt werden können, dass die durch Fahrzeugbeschleunigungenhervorgerufenen Richtungsfehler (Lotfehler) dieser Instrumenteunterdrückt werden, wenn ihre Schwingungsdauer auf 84,4 Min. abgestimmt wird.Diese Erkenntnis kann mit gleichem Erfolg auf synthetische Pendel, d.h. Plattformregelkreise,angewendet werden.Dies soll am Beispiel des Regelkreises in Bild 6b kurz erläutert werden.© <strong>HAMFU</strong> - www.hamfu.ch Seite 9