

Kapitel 2 Wellenoptik und Strahlenoptik Fermatsches Prinzip
Kapitel 2 Wellenoptik und Strahlenoptik Fermatsches Prinzip
Kapitel 2 Wellenoptik und Strahlenoptik Fermatsches Prinzip

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Kapitel</strong> 2<strong>Wellenoptik</strong> <strong>und</strong> <strong>Strahlenoptik</strong><strong>Fermatsches</strong> <strong>Prinzip</strong>2.1 Die Maxwellschen GleichungenJede Betrachtung zur Physik des Lichts beginnt mit den Maxwellschen Gleichungender Elektrodynamik, aus denen sich alle Lichtausbreitungsvorgängeableiten lassen. Im freien Raum ohne äußere Quellen nehmen diese die folgendeForm an: · B(r t) = 0 (2.1a) × E(r t) =−Ḃ(r t) (2.1b) · D(r t) = 0 (2.1c) × H(r t) =Ḋ(r t) . (2.1d)Wir verwenden die traditionellen Begriffe magnetische Induktion für B,elektrisches Feld für E, dielektrische Verschiebung für D <strong>und</strong> schließlichmagnetisches Feld für H. Diese vier Felder sind nicht unabhängigvoneinander, sondern sie sind durch sogenannte Materialgleichungen miteinanderverknüpft. Im freien Raum sind dies einfach lineare Relationen derFormD(r t) = ε 0 E(r t) H(r t) = 1 µ 0B(r t) (2.2)wobei ε 0 die Permittivität des Vakuums <strong>und</strong> µ 0 die Permeabilität desVakuums darstellen. Die Gleichungen (2.2) werden im Folgenden diejeni-5
gen sein, die den Zusammenhang zu Materialgrößen wie Polarisation <strong>und</strong>Magnetisierung herstellen werden.Die Maxwellschen Gleichungen zerfallen in zwei Gruppen, deren Aufteilungaber zunächst nicht eindeutig ist. Man erkennt, dass die Gleichungen(2.1a) <strong>und</strong> (2.1c) sowie (2.1b) <strong>und</strong> (2.1d) jeweils formal die gleiche Strukturbesitzen. Man wäre also dazu geneigt, die Felder (D B) <strong>und</strong> (E H) formalals zusammengehörend zu betrachten. Schließlich treten nur von (D B)Zeitableitungen in den Maxwellschen Gleichungen auf, so dass die zeitlicheEntwicklung der Felder formal nur (D B) betrifft. Diese Zuordnung spieltin der formalen Theorie der Elektrodynamik eine bedeutende Rolle, wir werdendarauf im Zusammenhang mit der Transformationsoptik noch einmalzurückkommen.Die alternative Gruppierung, die aus der Struktur der Maxwellschen Gleichungenfolgt, ist, die Felder (E B) <strong>und</strong> (D H) als zusammengehörend anzusehen.Dies hat den physikalischen Gr<strong>und</strong>, dass (E B) als mikroskopischeFelder anzusehen sind, während (D H) die aus den Materialgleichungen abgeleitetenmakroskopischen Größen darstellen. Beide Aufteilungen der Felderhaben also ihre Berechtigung, die auf jeweils verschiedene Anwendungen zugeschnittensind. Wir werden uns zunächst auf die physikalische Aufteilungkonzentrieren.2.1.1 Wellengleichung für elektromagnetische FelderWir gehen zurück zu den Maxwellschen Gleichungen <strong>und</strong> schreiben sie in eineForm um, so dass nur noch eine Größe, beispielsweise das elektrische Feld,auftaucht. Dazu berechnen wir die Rotation von (2.1b), × × E(r t) = − × Ḃ(r t) (2.3)setzen die Materialgleichung für die magnetische Induktion ein <strong>und</strong> verwenden(2.1d) mit dem Ergebnis × × E(r t) + 1 Ë(r t) = 0 (2.4)c2 wobei wir noch die Beziehung ε 0 µ 0 = 1/c 2 verwendet haben, in der c dieLichtgeschwindigkeit im Vakuum bezeichnet. Aus der Vektoridentität × × V = ( · V) − ( · )V, die für beliebige Vektorfelder V gilt, <strong>und</strong>6
unter Verwendung von (2.1c) folgt schließlich die Wellengleichung für daselektrische Feld− ΔE(r t) + 1 ∂ 2E(r t) = 0 . (2.5)c 2 ∂t2 Die F<strong>und</strong>amentallösungen der Gleichung (2.5) sind ebene Wellen der Forme σ e i·r−ωt) (2.6)die durch einen Polarisationseinheitsvektor e σ , einen Wellenvektor k<strong>und</strong> eine Frequenz ω charakterisiert sind. Setzt man diesen Ansatz in (2.5)ein, so findet man die Beziehungk 2 = ω2c 2 (2.7)zwischen dem Betrag des Wellenvektors <strong>und</strong> der Frequenz, die Dispersionsrelationdes Vakuums genannt wird. Die Polarisationseinheitsvektoren sindnotwendig, um den Vektorcharakter des elektrischen Feldes zu gewährleisten.Aus der Gleichung (2.1c) <strong>und</strong> den Materialgleichungen folgt, dass das elektrischeFeld ein transversales Vektorfeld ist. Das heisst, dass der Vektor deselektrischen Feldes senkrecht zur Ausbreitungsrichtung steht, wie man durchFouriertransformation von (2.1c) erkennt.Für monochromatische Wellen der Frequenz ω schreiben wir alsoE(r t) = E 0 e i·r−ωt) B(r t) = B 0 e i·r−ωt) (2.8)deren Wellenvektor wieder durch die Dispersionsrelation (2.7) eingeschränktist. Setzt man diesen Ansatz in die Maxwellschen Gleichungen ein, so findetman die zusätzlichen Beziehungen für die Amplituden der Felderk · E 0 = 0 k × E 0 = ωB 0 (2.9)sowiek · B 0 = 0 k × B 0 = − ω c 2 E 0 . (2.10)Daraus folgt, dass (k E 0 B 0 ) ein orthogonales Dreibein bilden. Die SchwingungsrichtungenE 0 <strong>und</strong> B 0 stehen also in der Tat senkrecht zur Ausbreitungsrichtungk wie angenommen.7
2.1.2 PolarisationDa die Wellengleichung (2.5) linear ist, gilt das Superpositionsprinzip <strong>und</strong> dieSumme zweier Lösungen ist wiederum eine Lösung der Wellengleichung. Somitkönnen wir die Amplitude E 0 mithilfe der Polarisationseinheitsvektorenzerlegen inE 0 = E 1 e 1 + E 2 e 2 (2.11)wobei die Amplituden E 1 <strong>und</strong> E 2 selbst im allgemeinen komplexe Größensind. Damit können wir schreibenE 0 = e 1 |E 1 |e iδ 1+ e 2 |E 2 |e iδ 2. (2.12)Die Phasenlage der Größen δ 1 <strong>und</strong> δ 2 verwendet man zur Klassifizierung dermöglichen Polarisationszustände:• Elliptische Polarisation: δ 1 = δ 2 . Der Feldvektor ReE(r t) rotiert an einemfesten Ort r auf einer Ellipse in der durch e 1 <strong>und</strong> e 2 aufgespanntenEbene.• Zirkulare Polarisation: δ 1 = δ 2 ± π/2, |E 1 | = |E 2 |. Der FeldvektorReE(r t) beschreibt einen Kreis mit Radius |E 1 | mit positiver bzw.negativer Helizität, wenn δ 1 = δ 2 + π/2 bzw. δ 1 = δ 2 − π/2 gilt.• Lineare Polarisation: δ 1 = δ 2 . Der Feldvektor ReE(r t) bewegt sich aufeiner Geraden in der (e 1 e 2 )-Ebene.2.1.3 Maxwellsche Gleichungen in kovarianter FormDie Maxwellschen Gleichungen <strong>und</strong> somit auch die Wellengleichung lassensich sehr kompakt in kovarianter Form schreiben. Dazu führen wir die folgendeNotation ein: Die kontravarianten <strong>und</strong> kovarianten Komponenteneines Vierervektors a bestehen aus der zeitlichen Komponente a 0 <strong>und</strong> demräumlichen Dreiervektor a, die man zua µ = (a 0 a) a µ = (a 0 −a) (2.13)zusammenfasst. Der Übergang von kovarianten zu kontravarianten Vektorengeschieht mit dem metrischen Tensor g µν in der Forma µ = g µν a ν a µ = g µν a ν (2.14)8
wobei nach der Einsteinschen Summenkonvention über doppelt auftretendeIndizes (jeweils ein oberer <strong>und</strong> ein unterer Index) summiert wird. In dieserArt <strong>und</strong> Weise erhält man die Invariante a 2 = a µ a µ = (a 0 ) 2 − a 2 .Im flachen Raum nimmt der metrische Tensor die diagonale Gestalt g µν =diag(1 −1 −1 −1) an 1 . Wichtige Beispiele für Vierervektoren sind:Ereignis: x µ = (ct x) Vierergeschwindigkeit: u µ = (γ γβ) Viererwellenvektor: k µ = (ω/c k) Viererstromdichte: j µ = (c j) Viererpotential: A µ = (φ/c A) Vierergradient: ∂ µ = ∂/∂x µ = (∂/∂ct ∂/∂x) .(2.15)Die Vierergeschwindigkeit ist hier dimensionslos <strong>und</strong> wird hier ausgedrücktdurch die dimensionslose Geschwindigkeit β = v/c <strong>und</strong> den Lorentzfaktorγ = (1 − β 2 ) −1/2 .Wir führen nun den Feldstärketensor über⎞0 −E 1 /c −E 2 /c −E 3 /cF µνx) = ⎜E 1 /c 0 −B 3 B 2⎝E 2 /c B 3 0 −B 1E 3 /c −B 2 B 1 0⎟⎠ (2.16)ein. Der Feldstärketensor ist antisymmetrisch, F µν = −F νµ . Die MaxwellschenGleichungen (2.1a)–(2.1d) lauten nun in kovarianter Notation∂ µ F νρ (x) + ∂ ρ F µν (x) + ∂ ν F ρµ (x) = 0 (2.17a)∂ µ F µν (x) = 0 . (2.17b)Gleichung (2.17a) ersetzt demnach die Gleichungen (2.1a) <strong>und</strong> (2.1b), wobeibeachtet werden muss, dass keiner der Indizes kontrahiert wird. Hierbeihandelt es sich um die kovariante Schreibweise einer Jacobi-Identität. Gleichung(2.17b) ersetzt die beiden anderen Maxwellschen Gleichungen (2.1c)<strong>und</strong> (2.1d). Die erste der beiden kovarianten Gleichungen (2.17a) kann mithilfedes dualen Feldstärketensors noch vereinfacht werden. Der duale Tensoreines beliebigen zweistufigen Tensors T µν ist definiert als∗ T µν = 1 2 µναβ T αβ (2.18)1 Diese Metrik ist nicht eindeutig. Man könnte auch die Metrik g µν = diag−1 1 1 1)verwenden. Die Physik bleibt dieselbe, wenn nur konsequent eine der beiden Formen verwendetwird.9
wobei µναβ der vierdimensionale (vollständig antisymmetrische) Levi–Civita-Pseudotensor ist ( 0123 = 1 <strong>und</strong> zyklisch). Der duale Feldstärketensor wirdsomit⎞0 −B 1 −B 2 −B 3∗ F µν (x) = ⎜B 1 0 E 3 /c −E 2 /c⎟⎝B 2 −E 3 /c 0 E 1 /c ⎠ (2.19)B 3 E 2 /c −E 1 /c 0<strong>und</strong> Gleichung (2.17a) wird ersetzt durch∂ µ ∗ F µν (x) = 0 (2.20)die, abgesehen von der Dualitätstransformation, equivalent zu (2.17b) ist.Die elektromagnetischen Felder erhält man aus dem Feldstärketensor überMultiplikation mit der Vierergeschwindigkeit bezüglich eines beliebigen BezugssystemsalsE µ = cF µν u ν B µ = ∗ F µν u ν (2.21)die sich im Ruhesystem u µ = (1 0) zu E µ = (0 E) <strong>und</strong> B µ = (0 B) reduzieren.Schlussendlich wird die Wellengleichung (2.5) zuE ν = (∂ µ ∂ µ )E ν = 0 . (2.22)Wir kommen auf weitere Details im Rahmen der Transformationsoptik zurück.2.2 Übergang zur geometrischen OptikWir nehmen nun an, dass sich eine elektromagnetische Welle nicht nur imfreien Raum, sondern in einem Medium mit einem Brechungsindex n ausbreitet.Wir werden später sehen, dass sich diese Welle dann nur mit einerGeschwindigkeit von v = c/n ausbreitet, so dass die Wellengleichung für eineKomponente des elektrischen Feldes (die skalare Wellengleichung) die FormΔE i − n2c 2 ∂ 2 E i∂t 2 = 0 (2.23)annimmt. Die Lösung wollen wir wiederum als ebene WelleE i (r t) = E i0 e iϕrt) (2.24)mit reeller Amplitude E i0 ansetzen, wobei die Phase ϕ(r t) = nk · r − ωt nurfür räumlich konstanten Brechungsindex tatsächlich die richtige Lösung der10
Wellengleichung darstellt. Für räumlich veränderliche Brechungsindexprofilen(r) versuchen wir einen verallgemeinerten AnsatzE i (r t) = E i0 (r)e iΦrt) Φ(r t) = Φ 0 (r) − ωt (2.25)mit veränderlicher Amplitude E i0 (r) <strong>und</strong> allgemeiner veränderlicher PhaseΦ 0 (r). Wir setzen diesen Ansatz in die Wellengleichung ein <strong>und</strong> führen dieAbleitungen aus,E i = [(E i0 ) + i(Φ 0 )E i0 ] e iΦ ΔE i = (ΔE i0 ) + i(ΔΦ 0 )E i0 + 2i(Φ 0 ) · (E i0 ) − (Φ 0 ) 2 E i0e iΦ ∂ 2 E i∂t 2 = −ω 2 E i0 e iΦ (2.26)so erhalten wir zwei gekoppelte partielle Differentialgleichungen für die Real<strong>und</strong>ImaginärteileΔE i0 + n 2 k 2 − (Φ 0 ) 2 E i0 = 0 (2.27a)(ΔΦ 0 )E i0 + 2(Φ 0 ) · (E i0 ) = 0 .(2.27b)Wir nehmen nun an, dass die Lichtwellenlänge λ = 2π/|k| viel kleiner ist alsdie Längenskala, auf der sich der Brechungsindex n(r) ändert, <strong>und</strong> dass sichdie Amplitude E i0 (r) nur schwach ändert. In dieser Näherung können wir denTerm ΔE i0 weglassen <strong>und</strong> erhalten die Eikonalgleichung der geometrischenOptik nω 2(Φ 0 ) 2 = n 2 k 2 = . (2.28)cDie räumlich veränderliche Phase Φ 0 (r) wird als Eikonal bezeichnet. DieLösung der Eikonalgleichung definiert die Ebenen konstanter Phase, also dieWellenfronten. Senkrecht dazu verlaufen die Lichtstrahlen oder Trajektoriender geometrischen Optik.2.3 <strong>Fermatsches</strong> <strong>Prinzip</strong>Dieselbe Interpretation erhält man, wenn man von einem Variationsprinzipähnlich dem Hamiltonprinzip startet. In der Optik wird dieses <strong>Prinzip</strong> als<strong>Fermatsches</strong> <strong>Prinzip</strong> bezeichnet, das im Wesentlichen die Aussage macht,dass die optische Weglänge des Pfades, das das Licht zwischen zwei Punkten11
A <strong>und</strong> B wählt, ein Extremum besitzt. Sei die infinitesimale Bogenlängeentlang dieses Pfades ds = dx 2 1 + dx 2 2 + dx 2 3, dann ist die optische WeglängeS = BAds n (2.29)entlang des Brechungsindexprofils n(r) = n(x 1 x 2 x 3 ) ein Extremum. Sei x 3die Ausbreitungsrichtung des Lichtstrahls, dann wird die Bogenlänge s =s(x 1 (x 3 ) x 2 (x 3 ) x 3 ) mit den Endpunkten A = (x 1 (x 3A ) x 2 (x 3A ) x 3A ) <strong>und</strong>B = (x 1 (x 3B ) x 2 (x 3B ) x 3B ). Die optische Weglänge wird dann zu einem Extremum,wenn B x3BδS = δ ds n = δ n ds x3Bdx 3 = δ L(x 1 ẋ 1 x 2 ẋ 2 x 3 )dx 3 = 0 Ax 3dx 3 x 3(2.30)wobeiL = n ds = n(x 1 x 2 x 3 )dx 31 + ẋ 2 1 + ẋ 2 2 = n(x 1 x 2 x 3 ) ẋ 2 1 + ẋ 2 2 + ẋ 2 3(2.31)die optische Lagrangefunktion <strong>und</strong> ẋ i = dx i /dx 3 (i = 1 2) die generalisiertenGeschwindigkeiten (ẋ 3 = dx 3 /dx 3 = 1) sind.Aus dem Wirkungsprinzip folgen die Euler–LagrangegleichungenDefinieren wir nun den optischen Impuls alsd ∂L− ∂L = 0 . (2.32)dx 3 ∂ẋ i ∂x ip i = ∂L ẋ i= nẋ2 ∂ẋ i 1 + ẋ 2 2 + ẋ 2 3= n dx ids (2.33)dann folgt aus der Definition der optischen Weglänge sofort∂S ∂L dpi= dx 3 = dx 3 = p i i = 1 2 (2.34)∂x i ∂x i dx 3unter Verwendung der Euler–Lagrangegleichungen. Führt man noch eine HamiltonfunktionH = ẋ 1 p 1 + ẋ 2 p 2 − L ein, so findet manH = ẋ 1 p 1 + ẋ 2 p 2 − (ẋ 1 p 1 + ẋ 2 p 2 + p 3 ) = −p 3 (2.35)12
<strong>und</strong> aus der Hamiltonschen Gleichung ∂H/∂x 3 = −∂L/∂x 3 die fehlende Beziehung∂S ∂L dp3= dx 3 = dx 3 = p 3 . (2.36)∂x 3 ∂x 3 dx 3Zusammengefasst erhalten wir für den optischen Impuls also p = S. Dawegen p = n dr/ds der Impuls tangential an den Lichtstrahlen liegt, sind dieFlächen S = const. gerade die Wellenfronten der geometrischen Optik.2.4 Wichtige Lösungen der WellengleichungWir kommen noch einmal zurück auf die Wellengleichung (2.5) <strong>und</strong> nehmenwieder an, dass das elektrische Feld monochromatisch ist, also eineZeitabhängigkeit e −iωt besitzt. Dann geht die Wellengleichung in die Helmholtzgleichung(Δ + k 2 )E(r) = 0 k = ω (2.37)cfür die räumlichen Moden über. Die ebenen Wellen e σ e i·r sind gerade spezielleLösungen von (2.37). Konzentrieren wir uns auf eine Polarisation, sofolgt für die Feldamplitude E 0 (r) die skalare HelmholtzgleichungKugelwellen(Δ + k 2 )E 0 (r) = 0 . (2.38)In Kugelkoordinaten (r Θ ϕ) ist der LaplaceoperatorΔ = 1 ∂r 2 ∂ + + 1 ∂sin Θ ∂ 1 ∂ 2+r 2 ∂r ∂r r 2 sin Θ ∂Θ ∂Θ r 2 sin 2 Θ ∂ϕ . (2.39)2Die FunktionE 0 (r) = A eikr(2.40)rmit einer Konstanten A löst demnach die skalare Helmholtzgleichung in Kugelkoordinaten.Die Wellenfronten sind Kugelschalen mit einem radialen Abstandvon λ = 2π/k, die sich radial mit der Phasengeschwindigkeit c ausbreiten.Die Kugelwellen lassen sich unter gewissen Umständen vereinfachen. Wirbetrachten dazu eine Kugelwelle, die vom Koordinatenursprung ausgeht, an13
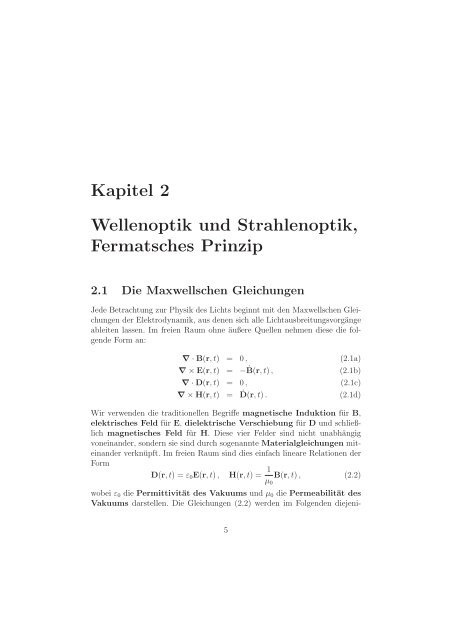
x2z 0z 0 z 02z 0zHermite-Gauß-ModenAbbildung 2.1: Wellenfronten eines Gaußstrahls.Die Gaußstrahlen sind bei weitem nicht die einzigen Moden, die die paraxialeHelmholtzgleichung (2.44) erfüllen. Eine wichtige <strong>und</strong> interessante Klassevon Moden entsteht, wenn man die komplexe Einhüllende E G (r) eines Gaußstrahlsderart modifiziert, dassE 0 (r) = E G (r)f x √2xW (z) √ 2yf y e ifzz) (2.51)W (z)gilt, wobei f x , f y <strong>und</strong> f z drei reelle Funktionen ihrer jeweiligen Argumentesein sollen. Die Phase dieser so eingeführten Einhüllenden ist bis auf den Termf z (z), der nicht von x <strong>und</strong> y abhängt, dieselbe wie die des zugr<strong>und</strong>eliegendenGaußstrahls. Das bedeutet, dass die Wellenfronten mit denen des Gaußstrahlsübereinstimmen. Insbesondere haben sie denselben Krümmungsradius R(z).Die Amplitudenverteilung ist allerdings in der transversalen Strahlrichtungmodifiziert.Diese Eigenschaften sind genau dann gesichert, wenn die Einhüllende(2.51) die paraxiale Helmholtzgleichung erfüllt. Aus dieser Forderung ergebensich Bedingungen an die reellen Funktionen f x , f y <strong>und</strong> f z . Dazu führen wirdie neuen Variablen u = √ 2x/W (z) <strong>und</strong> v = √ 2y/W (z) ein <strong>und</strong> berechnendie Ableitungen∂∂x f x =√2 ∂W (z) ∂u f x ∂∂z f x = −uW (z)∂W (z)∂z∂∂u f x (2.52)16
sowie∂∂x E G = ik xq(z) E G 1 ∂W (z)= zW 02W (z) ∂z z0W 2 2 (z) = 1R(z) . (2.53)Verwendet man nun noch die Beziehung 1/q(z) − 1/R(z) = 2i/(kW 2 (z))sowie die Tatsache, dass die Gaußsche Einhüllende E G (r) selbst die paraxialeHelmholtzgleichung erfüllt, dann erhält man die Differentialgleichung1 ∂ 2 f xf x ∂u − 2u∂f x2 ∂u+ 1 ∂ 2 f yf y ∂v − 2v ∂f y2 ∂v− kW 2 (z) ∂f z∂z = 0 . (2.54)Diese Gleichung besteht aus drei Summanden, die jeweils nur von einerder Variablen (u v z) abhängen. Wir lösen diese Gleichung deshalb durchTrennung der Variablen mit den Separationskonstanten −2m <strong>und</strong> −2n, sodass− 1 ∂ 2 f x2 ∂u + u∂f x2 ∂u− 1 ∂ 2 f y2 ∂v + v ∂f y2 ∂v 2 z ∂f zz 01 +z 0 ∂z= mf x (2.55a)= nf y (2.55b)= −(m + n) (2.55c)gilt. Die beiden ersten Gleichungen sind formal Eigenwertgleichungen für dieDifferentialoperatoren auf der linken Seite <strong>und</strong> den Eigenwerten m <strong>und</strong> n.Die Eigenfunktionen sind gerade die Hermitepolynome H m (u) <strong>und</strong> H n (v).Somit istf x (u) = H m (u) f y (v) = H n (v) . (2.56)Die verbleibende Gleichung wird aufintegriert <strong>und</strong> ergibtf z (z) = −(m + n) arctan z z 0= (m + n)ζ(z) . (2.57)Die komplexe Amplitude wird damit zu √2xW (z) √ 2yh nW (z)W 0E mn (r) = A mnW (z) h m× expikz + ik 22R(z) + i(m + n + 1)ζ(z) (2.58)17
−u2 /2wobei h l (u) = H l (u)e die sogenannte Hermitefunktion darstellt. Fürm = n = 0 reduziert sich dies zu der Amplitude des gewöhnlichen Gaußstrahls.Die Intensitätsverteilungen der niedrigsten Hermite-Gauß-Moden sindin Abb. 2.2 dargestellt.Abbildung 2.2: Intensitätsverteilungen der niedrigsten Hermite–Gauß-Modenfür (m n) = (0 1 2).18













