Weg, Winkel, Positionsmessung Michael Stocker Bernhard ...
Weg, Winkel, Positionsmessung Michael Stocker Bernhard ...
Weg, Winkel, Positionsmessung Michael Stocker Bernhard ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Weg</strong>, <strong>Winkel</strong>, <strong>Positionsmessung</strong> IE<br />
Drehachse angibt und dessen Länge den Schwung der Drehung angibt: Je länger<br />
der Pfeil, desto mehr Drehimpuls. Der Drehimpuls wächst mit:<br />
− höherer Geschwindigkeit,<br />
− größerer Masse, sowie<br />
− größerem Abstand zur Drehachse.<br />
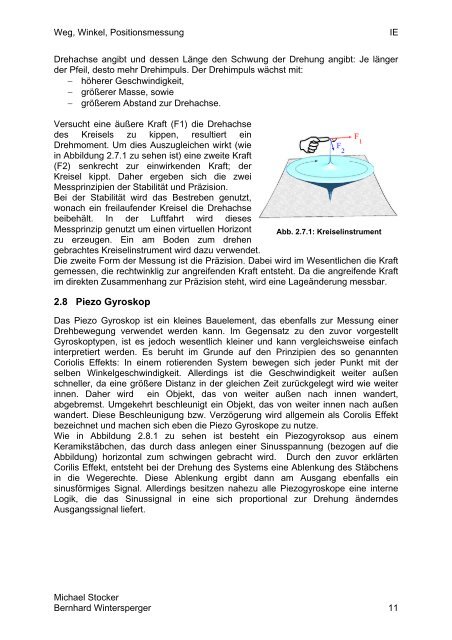
Versucht eine äußere Kraft (F1) die Drehachse<br />
des Kreisels zu kippen, resultiert ein<br />
Drehmoment. Um dies Auszugleichen wirkt (wie<br />
in Abbildung 2.7.1 zu sehen ist) eine zweite Kraft<br />
(F2) senkrecht zur einwirkenden Kraft; der<br />
Kreisel kippt. Daher ergeben sich die zwei<br />
Messprinzipien der Stabilität und Präzision.<br />
Bei der Stabilität wird das Bestreben genutzt,<br />
wonach ein freilaufender Kreisel die Drehachse<br />
beibehält. In der Luftfahrt wird dieses<br />
Messprinzip genutzt um einen virtuellen Horizont Abb. 2.7.1: Kreiselinstrument<br />
zu erzeugen. Ein am Boden zum drehen<br />
gebrachtes Kreiselinstrument wird dazu verwendet.<br />
Die zweite Form der Messung ist die Präzision. Dabei wird im Wesentlichen die Kraft<br />
gemessen, die rechtwinklig zur angreifenden Kraft entsteht. Da die angreifende Kraft<br />
im direkten Zusammenhang zur Präzision steht, wird eine Lageänderung messbar.<br />
2.8 Piezo Gyroskop<br />
Das Piezo Gyroskop ist ein kleines Bauelement, das ebenfalls zur Messung einer<br />
Drehbewegung verwendet werden kann. Im Gegensatz zu den zuvor vorgestellt<br />
Gyroskoptypen, ist es jedoch wesentlich kleiner und kann vergleichsweise einfach<br />
interpretiert werden. Es beruht im Grunde auf den Prinzipien des so genannten<br />
Coriolis Effekts: In einem rotierenden System bewegen sich jeder Punkt mit der<br />
selben <strong>Winkel</strong>geschwindigkeit. Allerdings ist die Geschwindigkeit weiter außen<br />
schneller, da eine größere Distanz in der gleichen Zeit zurückgelegt wird wie weiter<br />
innen. Daher wird ein Objekt, das von weiter außen nach innen wandert,<br />
abgebremst. Umgekehrt beschleunigt ein Objekt, das von weiter innen nach außen<br />
wandert. Diese Beschleunigung bzw. Verzögerung wird allgemein als Corolis Effekt<br />
bezeichnet und machen sich eben die Piezo Gyroskope zu nutze.<br />
Wie in Abbildung 2.8.1 zu sehen ist besteht ein Piezogyroksop aus einem<br />
Keramikstäbchen, das durch dass anlegen einer Sinusspannung (bezogen auf die<br />
Abbildung) horizontal zum schwingen gebracht wird. Durch den zuvor erklärten<br />
Corilis Effekt, entsteht bei der Drehung des Systems eine Ablenkung des Stäbchens<br />
in die <strong>Weg</strong>erechte. Diese Ablenkung ergibt dann am Ausgang ebenfalls ein<br />
sinusförmiges Signal. Allerdings besitzen nahezu alle Piezogyroskope eine interne<br />
Logik, die das Sinussignal in eine sich proportional zur Drehung änderndes<br />
Ausgangssignal liefert.<br />
<strong>Michael</strong> <strong>Stocker</strong><br />
<strong>Bernhard</strong> Wintersperger 11