Versuch 213 Messung der Phasen- und Gruppengeschwindigkeit ...
Versuch 213 Messung der Phasen- und Gruppengeschwindigkeit ...
Versuch 213 Messung der Phasen- und Gruppengeschwindigkeit ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Drittes Physikalisches Institut<br />
<strong>der</strong> Universität Göttingen<br />
Bürgerstraße 42-44<br />
D-37073 Göttingen<br />
Praktikum für Fortgeschrittene<br />
<strong>Versuch</strong> <strong>213</strong><br />
<strong>Messung</strong> <strong>der</strong> <strong>Phasen</strong>- <strong>und</strong><br />
<strong>Gruppengeschwindigkeit</strong> mit Ultraschall<br />
August 1997<br />
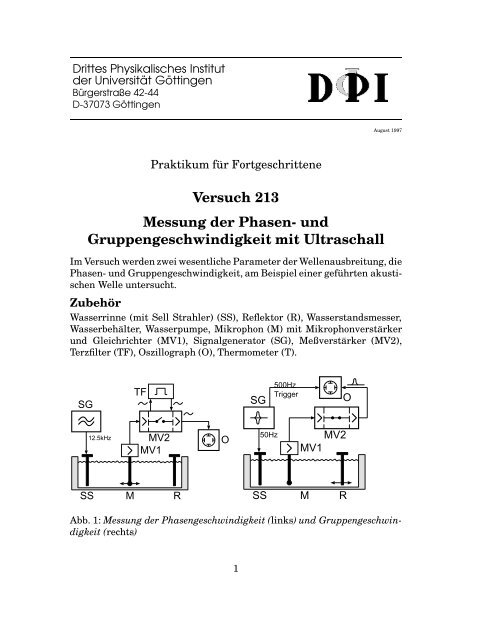
Im <strong>Versuch</strong> werden zwei wesentliche Parameter <strong>der</strong> Wellenausbreitung, die<br />
<strong>Phasen</strong>- <strong>und</strong> <strong>Gruppengeschwindigkeit</strong>, am Beispiel einer geführten akustischen<br />
Welle untersucht.<br />
Zubehör<br />
Wasserrinne (mit Sell Strahler) (SS), Reflektor (R), Wasserstandsmesser,<br />
Wasserbehälter, Wasserpumpe, Mikrophon (M) mit Mikrophonverstärker<br />
<strong>und</strong> Gleichrichter (MV1), Signalgenerator (SG), Meßverstärker (MV2),<br />
Terzfilter (TF), Oszillograph (O), Thermometer (T).<br />
SG<br />
12.5kHz<br />
TF<br />
MV2<br />
MV1<br />
SS M R<br />
O<br />
SG<br />
50Hz<br />
500Hz<br />
Trigger<br />
MV2<br />
MV1<br />
SS M R<br />
Abb. 1: <strong>Messung</strong> <strong>der</strong> <strong>Phasen</strong>geschwindigkeit (links) <strong>und</strong> <strong>Gruppengeschwindigkeit</strong><br />
(rechts)<br />
1<br />
O
<strong>Versuch</strong>sdurchführung<br />
Gemessen wird die <strong>Phasen</strong>- <strong>und</strong> <strong>Gruppengeschwindigkeit</strong> in Abhängigkeit<br />
von <strong>der</strong> Wasserhöhe (siehe auch Seite 16). Zur <strong>Messung</strong> <strong>der</strong> <strong>Phasen</strong>geschwindigkeit<br />
erzeugt man mit einem Dauerton (12:5 kHz) stehende Schallwellen.<br />
Aus dem Abstand <strong>der</strong> Minima erhält man die Wellenlänge <strong>und</strong><br />
mit <strong>der</strong> Frequenz die <strong>Phasen</strong>geschwindigkeit. Die <strong>Gruppengeschwindigkeit</strong><br />
wird nach dem Radarprinzip aus <strong>der</strong> Laufzeit von Schwingungsimpulsen<br />
bestimmt. (Pulsfolgefrequenz 50 Hz, Trägerfrequenz 12:5 kHz, Gaus-<br />
Impulse). Das Mikrophon steht dabei dicht vor dem Sen<strong>der</strong>. Eine qualitative<br />
Übersicht über die Echofolgen erhält man auf dem Oszillographen mit einer<br />
Kippfrequenz von 50 Hz. Zur quantitativen Untersuchung wird <strong>der</strong> Oszillograph<br />
mit 500 Hz Sägezahn aus SG getriggert. Durch Verschieben des<br />
Reflektors werden auf dem Oszillographen alle Echos einer Gruppe miteinan<strong>der</strong><br />
zur Deckung gebracht. Aus <strong>der</strong> Kippfrequenz <strong>und</strong> Abstand Sen<strong>der</strong>-<br />
Reflektor folgt die <strong>Gruppengeschwindigkeit</strong>.<br />
Auswertung<br />
<strong>Phasen</strong>- <strong>und</strong> <strong>Gruppengeschwindigkeit</strong> sind als Funktion <strong>der</strong> Wasserhöhe<br />
graphisch darzustellen <strong>und</strong> mit dem berechneten Verlauf zu vergleichen<br />
(Wassertemperatur!). Die Konstanz des Produktes aus <strong>Phasen</strong>- <strong>und</strong> <strong>Gruppengeschwindigkeit</strong><br />
ist für die gemessenen Werte zu prüfen. Alle Meßkurven<br />
mit Fehlerbalken versehen. Ferner sind die Fragen in <strong>der</strong> Anleitung zu<br />
beantworten.<br />
Zu beachten<br />
Vor den <strong>Messung</strong>en ist <strong>der</strong> horizontale Stand <strong>der</strong> Rinne zu prüfen. Die<br />
Pump-Geschwindigkeit <strong>der</strong> Wasserpumpe kann geregelt werden; die Pumpe<br />
mit dem Kippschalter ausschalten, nicht auf Null geregelt stehen lassen.<br />
Temperatur am Anfang <strong>und</strong> am Ende <strong>der</strong> <strong>Messung</strong> überprüfen. Es bietet<br />
sich an, die <strong>Phasen</strong>- <strong>und</strong> <strong>Gruppengeschwindigkeit</strong> jeweils für eine Wasserhöhe<br />
zu messen <strong>und</strong> dann den Wasserstand zu än<strong>der</strong>n.<br />
2
Theorie<br />
<strong>Phasen</strong>– <strong>und</strong> <strong>Gruppengeschwindigkeit</strong><br />
Bei Wellenausbreitungsvorgängen unterscheidet man gr<strong>und</strong>sätzlich<br />
zwei Fortpflanzungsgeschwindigkeiten: die <strong>Phasen</strong>geschwindigkeit <strong>und</strong><br />
die <strong>Gruppengeschwindigkeit</strong>. Die <strong>Gruppengeschwindigkeit</strong> wird auch<br />
Signal– o<strong>der</strong> Energieausbreitungsgeschwindigkeit genannt, woraus ihre<br />
physikalische Bedeutung bereits zu erkennen ist.<br />
Wir betrachten zunächst die <strong>Phasen</strong>geschwindigkeit. Die einfachste<br />
Form einer Welle ist die eindimensionale Sinuswelle. Für sie gilt<br />
cos(ωt�kx+ϕ) a(x;t)=a0 (1)<br />
Dabei ist a eine physikalische Größe, die an dieser Wellenbewegung teilnimmt,<br />
also z.B. die elektrische Feldstärke in <strong>der</strong> elektromagnetischen Welle<br />
o<strong>der</strong> <strong>der</strong> Schalldruck in <strong>der</strong> Schallwelle, <strong>und</strong> a0 ihre Amplitude, x ist die<br />
Koordinate in Ausbreitungsrichtung <strong>der</strong> Welle, t ist die Zeit, ω=2π=T die<br />
Kreisfrequenz mit <strong>der</strong> Periodendauer T, k=2π=λ die Wellenzahl <strong>und</strong> λ die<br />
Wellenlänge.(ωt�kx+ϕ)nennt man die Phase – oft bezeichnet man auch<br />
(�kx+ϕ)als (zeitfreie) Phase. Die Phase än<strong>der</strong>t sich bei festem x linear mit<br />
<strong>der</strong> Zeit <strong>und</strong> bei konstantem t linear mit dem Ort. Für einen festen <strong>Phasen</strong>wert<br />
ωt�kx+ϕ=const!x=ω<br />
k t+(ϕ�konst)=k folgt, daß <strong>der</strong> Ort sich mit<br />
<strong>der</strong> Geschwindigkeit<br />
dx<br />
dt Phase=const=ω<br />
k=c ph<br />
<strong>der</strong> sogenannten <strong>Phasen</strong>geschwindigkeit ausbreitet. Anschaulich ist die<br />
<strong>Phasen</strong>geschwindigkeit die Geschwindigkeit <strong>der</strong> Wellenberge (Phase=0)<br />
<strong>und</strong> <strong>der</strong> Wellentäler (Phase=π). (Bild 1a)<br />
Im allgemeinen ist die <strong>Phasen</strong>geschwindigkeit von <strong>der</strong> Wellenzahl bzw. <strong>der</strong><br />
Frequenz abhängig. Die Beziehung, die durch die <strong>Phasen</strong>geschwindigkeit<br />
zwischen ω <strong>und</strong> k gegeben ist (ω(k)=c ph(k)k) heißt Dispersionsbeziehung.<br />
Eine Welle transportiert Energie (z.B. gibt <strong>der</strong> Poynting-Vektor in <strong>der</strong> elektromagnetischen<br />
Welle den Leistungsfluß an). Mit welcher Geschwindigkeit<br />
diese Energie tranportiert wird, läßt sich in <strong>der</strong> unendlich ausgedehnten<br />
Sinuswelle nicht feststellen, für diesen Zweck muß man einen Wellenzug<br />
betrachten, denn es ist anschaulich klar, daß die Energie mit <strong>der</strong> Geschwindigkeit<br />
dieses Wellenzuges transportiert wird (Bild 1b). Wir wollen<br />
diese Geschwindigkeit berechnen. An einem festen Ort messen wir beim<br />
Durchlaufen des Wellenzuges eine zeitlich begrenzte Sinuschwingung. Eine<br />
solche Zeitfunktion enthält nicht nur die Frequenz ω0 <strong>der</strong> Sinusschwingung,<br />
son<strong>der</strong>n auch benachbarte Frequenzen. Die Breite des Frequenzbe-<br />
3<br />
(2)
eiches Δω, <strong>der</strong> in unserem Schwingungszug enthalten ist, ist nach einer<br />
Faustformel Δω=ω0=n, wobei n die Anzahl <strong>der</strong> im Schwingungszug enthaltenen<br />
Schwingungen ist. Man kann den Wellenzug auch zu einer festen Zeit<br />
als Funktion <strong>der</strong> Ortes betrachten <strong>und</strong> nach den räumlichen Frequenzen,<br />
also nach den Wellenzahlen fragen, die darin enthalten sind. Somit kommt<br />
man dann ganz analog zu einem Wellenzahlbereich <strong>der</strong> Breite Δk=k 0=n,<br />
wobei n jetzt die Zahl <strong>der</strong> in dem Wellenzug enthaltenen Wellenlängen ist.<br />
Natürlich sind diese Frequenzen <strong>und</strong> Wellenzahlen über die Dispersionsbeziehung<br />
einan<strong>der</strong> zugeordnet o<strong>der</strong> mit an<strong>der</strong>en Worten: <strong>der</strong> Wellenzug<br />
besteht aus lauter unendlich ausgedehnten Teilwellen mit etwas verschiedenen<br />
Frequenzen <strong>und</strong> Wellenzahlen; man spricht daher auch von einer<br />
Wellengruppe <strong>und</strong> nennt ihre Geschwindigkeit die <strong>Gruppengeschwindigkeit</strong>.<br />
Die Wellengruppe läßt sich als Summe (bzw. Integral) über diese<br />
Teilwellen darstellen. Dabei bedienen wir uns <strong>der</strong> bequemen komplexen<br />
Schreibweise (eine Sinuswelle wird dann a(x;t)=Refa0ei(ωt�kx)g, wobei<br />
a0=a 0eiϕ die komplexe Amplitude ist; meistens setzt man die Realteilbildung<br />
stillschweigend voraus, ohne sie in <strong>der</strong> Formel zu notieren). Für unsere<br />
Wellengruppe erhält man<br />
0+Δk=2<br />
a(x;t)=Zk ã0(k)e k0�Δk=2 i(ωt�kx)dk (3)<br />
4
mit ã0(k), die die Amplitudendichte pro Wellenzahleneinheit angibt. Die<br />
Frequenz ω(k)läßt sich um k0 in eine Taylorreihe entwickeln, die bei kleinen<br />
Δk nach dem linearen Glied abgebrochen werden kann, ohne daß man dabei<br />
große Fehler macht. Mit ω(k0)=ω0 <strong>und</strong> k�k0=δk gilt also ω(k)=ω0+dω<br />
dk δk.<br />
Mit ã0(k)=ã00(δk)erhält man folglich<br />
a(x;t)=e i(ω0t�k0x)Z+Δk=2 ã00(δk)exp[i(dω<br />
�Δk=2<br />
dk t�x)δk]d(δk) | 0(x;t) {z } . (4)<br />
a<br />
Das Integral liefert eine im Vergleich zur Trägerwelle ei(ω0t�k0x)langsam verän<strong>der</strong>liche Funktion von x <strong>und</strong> t nämlich die räumliche <strong>und</strong> zeitliche<br />
Verteilung <strong>der</strong> komplexen Amplitude a0(x;t), <strong>der</strong>en Betrag gerade die<br />
Umhüllende des Wellenzuges ist.<br />
Die Geschwindigkeit <strong>der</strong> Wellengruppe ist nun gleich <strong>der</strong> Geschwindigkeit<br />
<strong>der</strong> Umhüllenden, also<br />
cgr=dx<br />
, (5)<br />
dt a0(x;t)=const=dω<br />
dk<br />
o<strong>der</strong> wegen ω=k(ω)c ph(ω)<br />
cgr=c ph+k dcph<br />
ph�λ<br />
dk=c dcph<br />
dλ<br />
Die <strong>Gruppengeschwindigkeit</strong> ist also genau dann verschieden von <strong>der</strong> <strong>Phasen</strong>geschwindigkeit,<br />
wenn Dispersion vorliegt (Abhängigkeit <strong>der</strong> <strong>Phasen</strong>geschwindigkeit<br />
von <strong>der</strong> Wellenlänge bzw. Frequenz). Die komplexe Amplitude<br />
a 0(x;t)<strong>und</strong> seine Integraldarstellung kan natürlich jede mögliche Modulation<br />
einer Trägerwelle beschreiben, <strong>und</strong> man sieht, daß sich alle“Signale ” ,<br />
die einer Trägerwelle aufmoduliert sind, mit <strong>der</strong> <strong>Gruppengeschwindigkeit</strong><br />
ausbreiten: daher auch <strong>der</strong> Name <strong>Gruppengeschwindigkeit</strong>.<br />
Akustische Wellengleichung<br />
In <strong>der</strong> akustischen Welle in Gasen o<strong>der</strong> Flüssigkeiten schwanken drei<br />
Größen: <strong>der</strong> Druck, die Geschwindigkeit (Schnelle) <strong>und</strong> die Dichte. Um ihre<br />
Abhängigkeit von Raum <strong>und</strong> Zeit anzugeben, braucht man also drei Gleichungen.<br />
Zur Aufstellung dieser Gleichungen dienen die Erhaltungssätze<br />
für Masse, Impuls <strong>und</strong> Energie:<br />
Kontinuitätsgleichung<br />
Die Masse, die sich in einem Raumlement d 3 r befindet, ist ρ d 3 r (ρ ist die<br />
Dichte des Mediums), <strong>und</strong> die Masse die pro Zeiteinheit aus diesem Raum-<br />
5<br />
(6)
volumen ausfließt, ist div(ρv)d 3 r (v ist die Geschwindigkeit, ρv also <strong>der</strong><br />
Massenfluß pro Flächeneinheit). Es gilt dann<br />
Impulsgleichung<br />
˙ρ+div(ρv)=0 . (7)<br />
Die Impulsdichte ist ρv. Diese Impulsdichte än<strong>der</strong>t sich einmal dadurch,<br />
daß die Grenzflächen unseres betrachteten Raumelements durchströmt<br />
werden, wodurch Impuls zu- o<strong>der</strong> weggeführt wird, <strong>und</strong> dadurch, daß eine<br />
Kraft auf das Volumenelement ausgeübt wird. Der erste Term wird durch<br />
divI ausgedrückt, wobei I <strong>der</strong> Impulsflußdichtetensor ist (wir brauchen diesen<br />
Term hier nicht näher zu betrachten, da er für ein im Mittel ruhendes<br />
Medium keinen Beitrag zur linearisierten Wellengleichung liefert). Der<br />
zweite Term ist durch den Gradienten des statischen Drucks p gegeben,<br />
wenn man die Zähigkeitskräfte vernachlässigt. Die Impulsgleichung lautet<br />
dann<br />
Energiegleichung<br />
˙<br />
(ρv)+divI+gradp=0 . (8)<br />
Die vollständige Energiegleichung enhält sehr viele Terme. Die Energie eines<br />
Volumenelementes setzt sich aus <strong>der</strong> inneren <strong>und</strong> <strong>der</strong> kinetischen Energie<br />
zusammen, Energieaustausch mit <strong>der</strong> Umgebung findet statt durch<br />
Konvektion (div–Terme), durch Arbeit äußerer Kräfte, durch Wärmeleitung<br />
<strong>und</strong> –strahlung. Wir wollen alle irreversiblen Prozesse vernachlässigen;<br />
da auch die kinetische Energie keinen Beitrag zur Wellengleichung liefern<br />
wird, bleibt nach einigen Umformungen lediglich eine Beziehung zwischen<br />
p <strong>und</strong> ρ übrig, nämlich die Adiabatengleichung<br />
ρ<br />
p=p(ρ)jEntropie=const=p0<br />
κ<br />
ρ0<br />
Dabei sind p0 <strong>und</strong> ρ0 Druck <strong>und</strong> Dichte des ungestörten Mediums, κ ist das<br />
Verhältnis <strong>der</strong> spezifischen Wärmen. Diese Adiabatengleichung, die streng<br />
nur für ideales Gas gilt, beschreibt auch annähernd den Zusammenhang<br />
für Wasser, wenn man den Druck–Nullpunkt auf�3000 atm legt <strong>und</strong> ein κ<br />
von etwa 7 verwendet.<br />
Aus diesen drei Gleichungen soll nun die Wellengleichung für ein im Mittel<br />
ruhendes Medium hergeleitet werden. Dabei wird vorausgesetzt, daß die<br />
Schallgrößen klein gegen die ungestörten Größen sind. Sei also z.B. p0 <strong>der</strong><br />
ungestörte Druck <strong>und</strong> p=p0+p0, dann soll p0p0 sein, ebenso ρ0ρ0.<br />
6<br />
(9)
Bei <strong>der</strong> Geschwindigkeit muß man v0=0, v0c setzen. Wird werden sehen,<br />
daß alle drei Beziehungen äquivalent sind – in <strong>der</strong> ebenen Welle gilt<br />
ρ0=ρ=v0=c=p0=(κp0). Wir können daher alle Glie<strong>der</strong>, in denen Produkte von<br />
gestrichenen Größen auftreten, gegenüber den Glie<strong>der</strong>n, in denen die gestrichenen<br />
Größen nur einfach auftreten, vernachlässigen. Man sagt auch:<br />
Die Gleichungen werden in den Schallgrößen linearisiert. Man erhält dann<br />
aus <strong>der</strong> Kontinuitätsgleichung ˙ρ0+ρ0 divv0=0 . (10)<br />
Der Tensor I enthält nur Größen <strong>der</strong> Dimension ρv2 <strong>und</strong> damit nur Produkte<br />
von gestrichenen Größen. Daher ergibt sich aus <strong>der</strong> Impulsgleichung<br />
<strong>und</strong> aus <strong>der</strong> Energiegleichung (Taylorentwicklung)<br />
ρ0 ˙ v0+gradp0=0 (11)<br />
p0=dp<br />
dρ ρ0=κp 0<br />
ρ0. (12)<br />
Wir nennen dp=dρ=κp 0=ρ0=c 2 (es wird sich zeigen, daß es sich um das<br />
Quadrat <strong>der</strong> Schallgeschwindigkeit handelt). Aus (10) ergibt sich dann<br />
˙p0+ρ0c 2 divv0=0 (13)<br />
<strong>und</strong> zusammen mit (11) ¨p0�c 2 div gradp0=¨ p0�c 24p0=0 (14)<br />
(4=Laplace-Operator). Das ist die Wellengleichung.<br />
Man schreibt sie oft für das sogenannte Geschwindigkeitsportential Φ. Integriert<br />
man (11) über die Zeit, so erhält man<br />
v0=�grad(1<br />
Man sieht leicht, daß für Φ ebenfalls<br />
ρ 0<br />
ρ0Zp0dt)�gradΦ!p0=ρ0 ˙Φ (15)<br />
¨Φ�c 24Φ=0 (16)<br />
gilt.<br />
Die einfachste Lösung <strong>der</strong> Wellengleichung ist die ebene Welle, die z.B. in<br />
x-Richtung läuft:<br />
Φ=Φ0 cos(ωt�kx)mit ω=ck (17)<br />
7
Bild 2: Skizze zur Reflexion einer ebenen Welle an einer ebene Grenzfläche.<br />
Nach (15) kann man daraus p0<strong>und</strong> v0ausrechnen <strong>und</strong> erhält p0=ρ0 cv0. Den<br />
Ausdruck ρ0 c, also das Verhältnis von Schalldruck <strong>und</strong> Schnelle in <strong>der</strong> ebenen<br />
Welle, nennt man Wellenwi<strong>der</strong>stand. Er spielt bei <strong>der</strong> Formulierung<br />
von Randbedingungen eine wichtige Rolle.<br />
Randbedingungen<br />
Trifft eine Schallwelle auf eine Grenzfläche, so wird im allgemeinen ein Teil<br />
<strong>der</strong> Welle reflektiert, <strong>der</strong> an<strong>der</strong>e Teil dringt in das angrenzende Medium<br />
ein. Wie groß diese Anteile sind <strong>und</strong> welche <strong>Phasen</strong>beziehung zwischen ihnen<br />
<strong>und</strong> <strong>der</strong> einfallenden Welle bestehen, hängt von dem Verhältnis <strong>der</strong><br />
Wellenwi<strong>der</strong>stände <strong>der</strong> aneinan<strong>der</strong>grenzenden Medien ab. Das sei am einfachsten<br />
Beispiel, daß nämlich eine ebene Welle senkrecht auf eine ebene<br />
Grenzfläche auftritt, demonstriert (Bild 2): Der Wellenwi<strong>der</strong>stand des Mediums,<br />
in dem die Welle läuft, sei Z1=ρ01 c1, <strong>der</strong> des angrenzenden Mediums<br />
entsprechend Z 2. Wir haben ein eindimensionales Problem vor uns<br />
(es än<strong>der</strong>t sich nur etwas, wenn man in Normalenrichtung zur Grenzfläche<br />
fortschreitet). Sei x die Koordinate in dieser Richtung <strong>und</strong> x=0 die Grenzfläche,<br />
die einfallende Welle laufe in x-Richtung; x>0 ist also mit dem Medium<br />
2 ausgefüllt. Die eindimensionale Wellengleichung lautet<br />
¨Φ�c 2 ∂2 Φ<br />
∂x 2=0 . (18)<br />
Nimmt man einen harmonischen Zeitverlauf an, also Φ=Φ0(x)e iωt , dann<br />
8
erhält man<br />
ω 2 Φ0+c 2 ∂2Φ0 ∂x2=0 (19)<br />
mit <strong>der</strong> Lösung Φ0(x)=Φ00 e ikx<br />
k=w=c!Φ=Φ00 e i(ωt kx)<br />
v0+=p0� p0+<br />
v02=Z2!1+p0�=p0+<br />
(20)<br />
Das sind zwei Wellen, die in bzw. gegen die x-Richtung laufen. Im Medium 2<br />
wollen wir voraussetzen, daß es nur eine Welle gibt, die von <strong>der</strong> Grenzfläche<br />
losläuft (p02 , v02 ). Im Medium 1 haben wir die einlaufende Welle (p0+=v0+=Z1)<br />
<strong>und</strong> eventuell eine reflektierte Welle (p0�=v0�=Z 1). Bei x=0 gilt dann<br />
p0++p0�=p02 ; v0+�v0�=v02 (21)<br />
<strong>und</strong> wegen<br />
p02<br />
,<br />
(22)<br />
v0�=Z1 1�p0�=p0+Z1=Z2 Das Verhältnis p0�=p0+=r nennt man Reflexionsfaktor. Es gilt dann<br />
r=Z2�Z1<br />
. (23)<br />
Z2+Z1=Z2=Z1�1<br />
Z2=Z1+1<br />
Der Reflexionsfaktor ist also durch das Verhältnis <strong>der</strong> Wellenwi<strong>der</strong>stände<br />
Z2=Z1 gegeben. Ist dieses Verhältnis sehr klein o<strong>der</strong> sehr groß gegen eins,<br />
so wird alles reflektiert (jrj1). Man nennt die Grenzfläche schallweich,<br />
wenn Z2=Z1 1 <strong>und</strong> erhält Reflextion mit <strong>Phasen</strong>sprung; die Grenzfläche<br />
heißt schallhart, wenn Z 2=Z 1<br />
1, <strong>und</strong> man erhält Reflexion ohne <strong>Phasen</strong>-<br />
sprung. Für Z2=Z1 ist r=0, d.h. die Welle geht ohne Reflexion durch die<br />
Grenzfläche, <strong>und</strong> man sagt dann, daß das Medium 2 an das Medium 1 angepaßt<br />
ist. Das entspricht übrigens <strong>der</strong> Anpassung eines Verbrauchers an<br />
einen Generator, indem man den Verbraucherwi<strong>der</strong>stand dem Innenwi<strong>der</strong>stand<br />
des Generators gleich macht. Der Verbraucher zieht dann maximale<br />
Leistung aus dem Generator.<br />
Schon bei schrägem Einfall, wird es wesentlich schwieriger, die Randbedingungen<br />
an <strong>der</strong> Grenzfläche anzugeben; dann geht nämlich auch das<br />
Verhältnis <strong>der</strong> Schallgeschwindigkeiten ein, da sich die Brechung bemerkbar<br />
macht. Für den Fall schallweicher o<strong>der</strong> schallharter Grenzflächen wird<br />
die Randbedingung jedoch wie<strong>der</strong> sehr einfach. Man kann sich leicht überlegen,<br />
daß im ersten Fall <strong>der</strong> Schalldruck, im zweiten Fall die wandnormale<br />
Schallschnelle an <strong>der</strong> Grenzfläche verschwinden muß (daher auch die Namen<br />
“schallhart ” <strong>und</strong> “schallweich ” ). Nach (15) muß an <strong>der</strong> schallweichen<br />
Grenzfläche also Φ, an <strong>der</strong> schallharten gradΦ e (e=Einheitsvektor in Normalenrichtung)<br />
verschwinden.<br />
9
Bild 3: Skizze <strong>der</strong> Wasserrinne<br />
Lösung <strong>der</strong> Wellengleichung in <strong>der</strong> schallweich begrenzten<br />
Wasserrinne<br />
Setzt man für Φ einen harmonischen Zeitverlauf voraus, so kann man in<br />
<strong>der</strong> Wellengleichung (16) die Zeitabhängigkeit von <strong>der</strong> Ortabhängigkeit separieren,<br />
d.h. für Φ=ψ(x;y;z)e iωt erhält man die Differentialgleichung<br />
!4ψ+k 2<br />
�ω 2 ψe<br />
iωt�c<br />
24ψe<br />
iωt=0<br />
0ψ=0 ; k0=ω<br />
c<br />
(24)<br />
Wir machen nun zur Lösung dieser nur noch vom Ort abhängigen Differentialgleichung<br />
einen weiteren, nach Bernoulli benannten Seperationsansatz,<br />
nämlich<br />
ψ=X(x)Y(y)Z(z). (25)<br />
Ein solcher Ansatz ist natürlich nur dann sinnvoll, wenn wie in unserem<br />
Fall die Randbedingungen für beispielsweise y=const <strong>und</strong> z=const gegeben<br />
sind o<strong>der</strong> mit an<strong>der</strong>en Worten, die Randflächen eben sind <strong>und</strong> senkrecht<br />
aufeinan<strong>der</strong> stehen. Wir werden also das Koordinatensystem entsprechend<br />
Bild 3 festlegen. H ist die Wasserhöhe in <strong>der</strong> Rinne, B ihre Breite.<br />
Setzt man (25) in (24) ein, so erhält man<br />
XxxYZ+XYyyZ+XYZzz+k 2 0 XYZ=0 . (26)<br />
10
Dabei bedeutet z.B. Xxx=∂ 2X=∂x2 . Wir betrachten nun die Differentialgleichung<br />
längs einer Geraden y=y0, z=z0, die parallel zur x-Achse läuft. Es<br />
sei Y(y0)6=0, Z(z0)6=0, dann gilt<br />
Xxx+X(Yyy<br />
. (27)<br />
Y(y0)+Zzz<br />
Diese Differentialgleichung liefert eine Lösung X(x), die von y0, z0 unabhängig<br />
sein muß. Daher ist <strong>der</strong> Klammerausdruck eine Konstante, die<br />
wir k2 x nennen wollen. Analog läßt sich k2 y <strong>und</strong> k2 z definieren <strong>und</strong> aus (26) folgt<br />
k2 x+k 2 y+k 2 z=k 2 0 . (28)<br />
Wir erhalten also drei Differentialgleichungen <strong>der</strong> Art<br />
Xxx+k 2 x X=0 (29)<br />
mit den Lösungen<br />
X=X0 e ikxx<br />
; Y=Y0e ikyy<br />
; Z=Z0 e ikzz Y(0)=<br />
. (30)<br />
Wir müssen jetzt kx, ky <strong>und</strong> kz so bestimmen <strong>und</strong> die Lösungen so überlagern,<br />
daß die Randbedingungen erfüllt werden. Die Randbedingungen lauten: für<br />
y=0, y=B, z=0, z=H muß ˙Φ=iωΦ=0 also ψ=0 sein. Daraus folgt Y(B)=0 <strong>und</strong> Z(0)=Z(H)=0. Aus Y(0)=0 folgt<br />
Y(y)=Y00(e ikyy�e�ikyy)=2iY00 sin(kyy)=Y0sin(kyy) (31)<br />
<strong>und</strong> aus Y(B)=0 folgt<br />
ky B=nπ ; n=1;2;3:::!ky=nπ . (32)<br />
B<br />
Analog erhält man<br />
(33)<br />
nach (28) ist<br />
Z(z)=Z0 sin(mπ<br />
H z); m=1;2;3:::.<br />
kx=sk 2 0�nπ<br />
B<br />
2+mπ<br />
H<br />
Z(z0)+k 2 0)=0<br />
2=k0r1�ωg<br />
ω<br />
2<br />
, (34)<br />
wobei ωg=πcpn 2=B 2+m 2=H 2 die Grenzfrequenz ist, oberhalb <strong>der</strong> für ein be-<br />
stimmtes(n;m)kx reell <strong>und</strong> unterhalb <strong>der</strong> kx imaginär ist. Als Gesamtlösung<br />
erhält man<br />
Φ(x;y;z;t)=Φ0 sin(kyy)sin(kzz)e i(ωt�kxx). (35)<br />
11
Diese Lösung hängt natürlich noch von(n;m)ab. Man nennt die verschiedenen<br />
Lösungen meistens(n;m)-Moden. In Bild 5 sind die Querschnittsverteilungen<br />
des Schalldruckes für die(1;1)-Mode<br />
kx=<br />
<strong>und</strong> die(2;1)-Mode dargestellt.<br />
Diese Querschnittsverteilungen breiten sich wellenartig in x-Richtung aus,<br />
falls kx reell ist. Für den Fall, daß kx imaginär ist, schwingt die Querschnittsverteilung<br />
mit räumlich konstanter Phase, <strong>und</strong> ihre Amplitude<br />
klingt in x-Richtung exponentiell ab. Bild 4 zeigt als Funktion <strong>der</strong> Frequenz<br />
die <strong>Phasen</strong>- <strong>und</strong> <strong>Gruppengeschwindigkeit</strong> <strong>und</strong> die Dämpfung. Dabei ist die<br />
Frequenz mit <strong>der</strong> Grenzfrequenz dimensionslos gemacht worden, die Geschwindigkeiten<br />
mit <strong>der</strong> Schallgeschwindigkeit <strong>und</strong> die Dämpfung mit <strong>der</strong><br />
reziproken Grenzwellenlänge. Auf diese Weise gilt dieses Diagramm für<br />
sämtliche Moden.<br />
<strong>Phasen</strong>geschwindigkeit:<br />
c<br />
cph=ω . (36) q1��ωg 2<br />
ω<br />
Die <strong>Gruppengeschwindigkeit</strong> ergibt sich durch die Differentiation von (34):<br />
dkx 1<br />
qk<br />
dω= 2 0�(k y+k 2 2<br />
. (37)<br />
c!cgr=dω<br />
dkx=cr1�ωg<br />
ω<br />
z)ω<br />
Dämpfung:<br />
2<br />
a=kgs1�ω<br />
ωg<br />
2<br />
; kg=ωg<br />
c=qk2 y+k 2 z<br />
(38)<br />
Das Produkt aus Gruppen- <strong>und</strong> <strong>Phasen</strong>geschwindigkeit ist also c2 . Das gilt<br />
nicht für alle Dispersionsbeziehungen, vielmehr folgt aus<br />
ω dω<br />
k dk=c<br />
c2=k 2+const!k 2=k 2 0�const (39)<br />
also eine Dispersionsbeziehung, die auch in unserem Fall vorliegt.<br />
Man kann sich die Lösung (35) auch auf eine an<strong>der</strong>e Weise entstanden denken,<br />
nämlich durch die Überlagerung von ebenen Wellen, die zwischen den<br />
Wänden <strong>der</strong> Wasserrinne hin- <strong>und</strong> herreflektiert werden. Das sieht man<br />
leicht, wenn man die Partiallösungen (30) an<strong>der</strong>s zusammensetzt, nämlich<br />
z.B.<br />
2!ω 2<br />
Φ=Φ0 e�i(kxx+kyy+kzz)e iωt<br />
. (40)<br />
Das ist eine ebene Welle, die in Richtung k=(kx;ky;kz)des sogenannten Wellenzahlenvektors<br />
läuft <strong>und</strong> die <strong>Phasen</strong>geschwindigkeit<br />
13
cph=ω (41) jkj=ω k0=c<br />
hat. Die Lösung (35) setzt sich aus vier solchen ebenen Wellen zusammen,<br />
die durch Reflektion an den Wänden <strong>der</strong> Wasserrinne auseinan<strong>der</strong> hervorgehen,<br />
<strong>und</strong> <strong>der</strong>en Ausbreitungsrichtungen mit <strong>der</strong> x-Richtung den gleichen<br />
Winkel α=arctg(qk 2 y+k 2 z=kx)einschließen. In Bild 6 sind die Phafläche<br />
mit <strong>der</strong> x-Achse läuft in x-Richtung mit <strong>der</strong> Geschwindigkeit vsp=<br />
senflächen dieser Wellen für die(2;0)-Mode skizziert. (Hier fallen je zwei<br />
<strong>der</strong> vier Partialwellen zusammen). Der Schnittpunkt einer solchen <strong>Phasen</strong>-<br />
c=cosα (man nennt vsp die Spurgeschwindigkeit). Unter <strong>der</strong> Annahme, daß<br />
das betrachtete Medium selbst (in unserem Fall Wasser) dispersionsfrei ist,<br />
ist die Komponente <strong>der</strong> Energieausbreitungsgeschwindigkeit in x-Richtung<br />
2<br />
vE=c cos α. Man rechnet leicht nach, daß cosα=q1��ωg<br />
ω ist, <strong>und</strong> daß also<br />
vsp <strong>und</strong> vE gerade <strong>Phasen</strong>- <strong>und</strong> <strong>Gruppengeschwindigkeit</strong> in <strong>der</strong> Wasserrinne<br />
sind.<br />
Bild 6 zeigt die(2;1)-Mode nicht nur oberhalb, son<strong>der</strong>n auch bei <strong>und</strong> unterhalb<br />
<strong>der</strong> Grenzfrequenz. Der Winkel α ergibt sich dabei zwangsläufig<br />
aus <strong>der</strong> Bedingung, daß sich am Rand stets eine durchgezogene (Druckmaxima)<br />
<strong>und</strong> eine gestrichelte (Druckminima) Linie schneiden müssen (am<br />
Rand muß p=0 gelten).<br />
15
<strong>Messung</strong><br />
Im <strong>Versuch</strong> werden die <strong>Phasen</strong>- <strong>und</strong> die <strong>Gruppengeschwindigkeit</strong>en <strong>der</strong><br />
(1;1)-Mode in <strong>der</strong> schallweich ausgekleideten Wasserrinne gemessen.<br />
<strong>Phasen</strong>geschwindigkeit<br />
Da die Phase selbst keine physikalische Größe ist, muß man zur Bestimmung<br />
<strong>der</strong> <strong>Phasen</strong>geschwindigkeit physikalische Hilfsgrößen bestimmen,<br />
aus denen sich die <strong>Phasen</strong>geschwindigkeit berechnen läßt, also die Kreisfrequenz<br />
ω <strong>und</strong> die Wellenzahl k, bzw. die Frequenz f <strong>und</strong> die Wellenlänge<br />
λ. Für die <strong>Phasen</strong>geschwindigkeit gilt dann<br />
cph=ω<br />
c=f λ . (42)<br />
Im <strong>Versuch</strong> ist die Frequenz fest vorgegeben: f=12:5 kHz. Die Wellenlänge<br />
wird aus dem Knotenabstand in <strong>der</strong> stehenden Welle bestimmt, die vor einer<br />
schallweich reflektierenden Querwand in <strong>der</strong> Wasserrinne entsteht.<br />
Fragen:<br />
1. Diese Meßverfahren ist nur sinnvoll, wenn nur eine einzige Mode ausbreitungsfähig<br />
ist. Warum?<br />
2. In welchem Wassserhöhenbereich muß man messen, damit diese Bedingng<br />
für die(1;1)-Mode erfüllt ist ? Diese Frage vor dem <strong>Versuch</strong>stag<br />
klären!<br />
3. Gibt es eine Wasserhöhe, bei <strong>der</strong> eine an<strong>der</strong>e als die(1;1)-Mode als<br />
einzige ausbreitungsfähig ist?<br />
Aus Bild 4 liest man ab, daß die Dämpfung einer Mode nahe unterhalb ihrer<br />
Grenzfrequenz o<strong>der</strong>, bezogen auf den hier vorliegenden Fall, nahe unterhalb<br />
<strong>der</strong> Grenzwasserhöhe, ziemlich klein ist. Das bedeutet für unseren<br />
Fall, daß die erste Störmode ((1;2)- o<strong>der</strong>(2;1)-Mode) auch unterhalb<br />
ihrer Grenzwasserhöhe noch ziemlich weit in die Meßstrecke hineinreichen<br />
kann. Um bei solchen Wasserhöhen noch sinnvoll messen zu können,<br />
muß man versuchen, das Verhältnis von Störamplitude <strong>und</strong> Amplitude <strong>der</strong><br />
(1;1)-Mode möglichst klein zu machen. Zu diesem Zweck bieten sich zwei<br />
Möglichkeiten an.<br />
1. Das Mikrofon läßt sich nicht nur in <strong>der</strong> Achsenrichtung <strong>der</strong> Meßstrecke<br />
verschieben, son<strong>der</strong>n auch in den beiden Richtungen quer<br />
dazu. Man stellt es zweckmäßigerweise auf einen solchen Punkt im<br />
Querschnitt, an dem <strong>der</strong> Schalldruck <strong>der</strong> möglichen Störmoden verschwindet.<br />
Welcher Punkt ist das?<br />
16
2. Der Abstand zwischen Schallsen<strong>der</strong> <strong>und</strong> Reflektor kann verän<strong>der</strong>t<br />
werden, er wird zweckmäßigerweise auf ein ganzzahliges Vielfaches<br />
<strong>der</strong>(1;1)-Moden-Wellenlänge einstellt, so daß also die Rinne für die<br />
(1;1)-Mode auf Resonanz abgestimmt ist (s.u.: Resonanz auf einer homogenen<br />
Leitung).<br />
Aus Bild 4 ist zu sehen, daß sich die <strong>Phasen</strong>- <strong>und</strong> die <strong>Gruppengeschwindigkeit</strong><br />
beson<strong>der</strong>s stark in <strong>der</strong> Nähe <strong>der</strong> Grenzfrequenz än<strong>der</strong>t. Es ist also<br />
sinnvoll, in diesem Bereich die Meßpunkte beson<strong>der</strong>s dicht zu legen.<br />
Resonanz auf einer homogenen Leitung<br />
Auf einer Leitung ist Wellenausbreitung in nur einer Dimension möglich.<br />
Dabei braucht das Feld von Querkoordinaten nicht unabhängig zu sein <strong>und</strong><br />
ist es in den meisten Fällen auch nicht. Homogen heißt eine Leitung, wenn<br />
ihre Parameter unabhängig von <strong>der</strong> Koordinate in Ausbreitungsrichtung<br />
sind. Somit gehören die Wasserrinne <strong>und</strong> ihr elektromagnetisches Analogon,<br />
<strong>der</strong> elektrische Hohlleiter, zu den homogenen Leitungen. Ein Leitunsgstück,<br />
dessen Ende einen Teil einer auf <strong>der</strong> Leitung laufenden Welle reflektieren,<br />
hat Resonanzeigenschaften. Wir wollen uns hier auf den einfachsten<br />
Fall beschränken, den wir auch in <strong>der</strong> vorliegenden Wasserrinne verwirklicht<br />
finden, nämlich eine schwach dämpfende Leitung, die an einem Ende<br />
nahezu vollständig reflektierend abgeschlossen ist <strong>und</strong> am an<strong>der</strong>en Ende<br />
mit einem Sen<strong>der</strong> angeregt wird. Um ein möglichst klares Bild zu gewinnen,<br />
wollen wir das Problem von zwei Seiten beleuchten. Wir stellen uns<br />
zunächst vor, daß <strong>der</strong> Sen<strong>der</strong> einen kurzen Wellenzug abstrahlt (Bild 7), <strong>der</strong><br />
zwischen Sen<strong>der</strong> <strong>und</strong> Reflektor hin- <strong>und</strong> herläuft, bis nach <strong>der</strong> Zeit τ seine<br />
Energie infolge <strong>der</strong> Leitungsdämpfung <strong>und</strong> <strong>der</strong> unvollständigen Reflexionen<br />
aufgezehrt ist. Strahlt nun <strong>der</strong> Sen<strong>der</strong> mit zeitlich konstanter Amplitude,<br />
so wird sich nach <strong>der</strong> “Einschwingzeit ” τ auf <strong>der</strong> Leitung ein gewisses<br />
Stehwellenfeld ausgebildet haben. Dieses Stehwellenfeld kann man<br />
sich aus einzelnen, sich überlagernden Schwingungszügen zusammengesetzt<br />
denken, die je nach ihrer individuellen Laufzeit mehr o<strong>der</strong> weniger<br />
stark gedämpft sind. Im allgemeinen werden sich diese Schwingungszüge<br />
nicht alle mit gleicher Phase addieren, sie werden sich aber auch nicht<br />
vollständig wegkompensieren, so daß man stets eine bestimmte nicht verschwindende<br />
Amplitude <strong>der</strong> Stehwelle auf dem Leitungsstück erhält. Diese<br />
Amplitude ist beson<strong>der</strong>s groß, wenn sich die einzelnen Schwingungszüge<br />
gleichphasig addieren: man spricht dann von Resonanz. Die Bedingung<br />
dafür ergibt sich aus <strong>der</strong> Länge des Leitungsstücks, <strong>der</strong> Wellenlänge <strong>und</strong><br />
den <strong>Phasen</strong>sprüngen bei den Reflexionen an den Leitungsenden.<br />
Man kann sich nun leicht überlegen, wo im Fall <strong>der</strong> Resonanz die Knoten<br />
<strong>und</strong> Bäche liegen. Um das gleiche Problem außerhalb <strong>der</strong> Resonanz zu<br />
17
lösen, denkt man sich die einzelnen Schwingungszüge zu einer auf den Reflektor<br />
auslaufenden <strong>und</strong> eine reflektierte Welle aufaddiert. Die <strong>Phasen</strong>differenz<br />
<strong>und</strong> <strong>der</strong> Amplitudenunterschied zwischen diesen beiden Wellen sind<br />
dann im wesentlichen durch das Verhältnis Reflektorimpedanz / Wellenwi<strong>der</strong>stand<br />
<strong>der</strong> Leitung <strong>und</strong> den Abstand vom Reflektor gegeben. Das heißt,<br />
vor dem Reflektor baut sich ein Stehwellenfeld auf, das allein von den Reflektoreigenschaften<br />
bestimmt wird. Die Lage des Sen<strong>der</strong>s in Bezug auf dieses<br />
Stehwellenfeld hängt von <strong>der</strong> Länge des betrachteten Leitungsstücks<br />
ab. Wieviel Energie <strong>der</strong> Sen<strong>der</strong> an dieses Stehwellenfeld abgibt, hängt vom<br />
Innenwi<strong>der</strong>stand des Sen<strong>der</strong>s ab. Das soll näher am hier vorliegenden Beispiel<br />
erläutert werden: Der Sen<strong>der</strong> hat in unserem Fall einen recht klei-<br />
18
nen akustischen Innenwi<strong>der</strong>stand, d.h. er macht bei relativ kleinem Schalldruck<br />
eine große Schnelle. Er wird also dann beson<strong>der</strong>s viel Energie an ein<br />
Medium abgeben, wenn dieses Medium ebenfalls einen kleinen Eingangswi<strong>der</strong>stand<br />
hat, also an die Stehwelle, wenn <strong>der</strong> Sen<strong>der</strong> sich im Druckminimum<br />
(kleiner Druck, große Schnelle) befindet – das entspricht <strong>der</strong> Resonanz<br />
–; er wird beson<strong>der</strong>s wenig Leistung abgeben, wenn er sich in einem<br />
Druckmaximum befindet – Antiresonanz.<br />
<strong>Gruppengeschwindigkeit</strong><br />
Zur Bestimmung <strong>der</strong> <strong>Gruppengeschwindigkeit</strong> wird <strong>der</strong> Weg gemessen, den<br />
eine Wellengruppe – hier mit einer Gauß-Funktion als Umhüllen<strong>der</strong> – in<br />
1 ms zurücklegt. Zu diesem Zweck wird die Wellengruppe zwischen dem<br />
Sen<strong>der</strong> <strong>und</strong> einem verschiebbaren Reflektor hin- <strong>und</strong> herreflektiert <strong>und</strong> von<br />
dem dicht vor dem Sen<strong>der</strong> stehenden Mikrofon registriert. Das gleichgerichtete<br />
<strong>und</strong> auf einem Oszillographen dargestellte Mikrofonsignal zeigt<br />
dann den vom Sen<strong>der</strong> agbestrahlten Primärimpuls <strong>und</strong> die in regelmäßigen<br />
Abständen folgenden Echos. Der Abstand Sen<strong>der</strong>-Reflektor wird nun<br />
so eingestellt, daß <strong>der</strong> zeitliche Abstand zwischen den Echos genau 2 ms beträgt.<br />
Zu diesem Zweck wird <strong>der</strong> Oszillograph mit einer 500 Hz Sägezahn-<br />
Spannung getriggert – d.h. <strong>der</strong> Elektronenstrahl kann nur zu diskreten<br />
Zeitpunkten loslaufen, die 2 ms Abstand haben. Wenn dann die Echos ebenfalls<br />
mit einem Abstand von 2 ms aufeinan<strong>der</strong>folgen, werden sie ganau<br />
übereinan<strong>der</strong>geschrieben.<br />
Dabei ist <strong>der</strong> Primärimpuls etwas schmaler – zeitlich kürzer – als die Echos,<br />
<strong>und</strong> sein Maximum ist gegenüber den Maxima <strong>der</strong> Echos ein wenig nach<br />
rechts verschoben. Außerdem kann die Amplitude des Primärimpulses kleiner<br />
sein als die Amplitude des ersten Echos. Warum?<br />
Hinweis: Der Sen<strong>der</strong> wirkt wie ein weicher Reflektor, d.h. das Schalldruckmaximum<br />
liegt etwa 1=4 vor dem Sen<strong>der</strong>, <strong>und</strong> man solte das Mikrofon etwa<br />
dorthin stellen.<br />
19