Berechnungen mit MATLAB-Skript invkin_3gelenk.m ausgeführt!
Berechnungen mit MATLAB-Skript invkin_3gelenk.m ausgeführt!
Berechnungen mit MATLAB-Skript invkin_3gelenk.m ausgeführt!

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
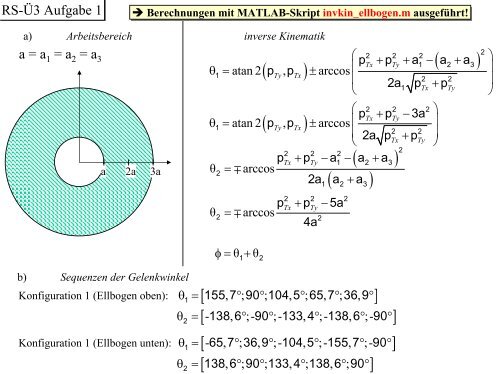
RS-Ü3 Aufgabe 1<br />
a) Arbeitsbereich<br />
a = a 1 = a 2 = a 3<br />
a 2a 3a<br />
b) Sequenzen der Gelenkwinkel<br />
Konfiguration 1 (Ellbogen oben):<br />
Konfiguration 1 (Ellbogen unten):<br />
�� <strong>Berechnungen</strong> <strong>mit</strong> <strong>MATLAB</strong>-<strong>Skript</strong> <strong>invkin</strong>_ellbogen.m <strong>ausgeführt</strong>!<br />
1<br />
inverse Kinematik<br />
⎛ 2 2 2<br />
p p 3a ⎞<br />
Tx + Ty −<br />
θ 1 = atan 2 ( p , p ) arccos⎜<br />
⎟<br />
Ty Tx ±<br />
⎜ 2 2<br />
2a p p ⎟<br />
⎝ Tx + Ty ⎠<br />
2<br />
2 2 2<br />
pTx + pTy−a − a + a<br />
θ2 = ∓ arccos<br />
2a a a<br />
pTx + pTy−5a θ2 = ∓ arccos<br />
2<br />
4a<br />
1 ( 2 3)<br />
( + )<br />
1 2 3<br />
2 2 2<br />
( )<br />
2<br />
⎛ 2 2 2<br />
p p a1 a2 a ⎞<br />
Tx + Ty + − + 3<br />
θ 1 = atan 2 ( p , p ) arccos⎜<br />
⎟<br />
Ty Tx ±<br />
⎜ 2 2<br />
2a1 p + p ⎟<br />
Tx Ty<br />
⎝ ⎠<br />
φ = θ1+ θ2<br />
[ 155, 7 ; 90 ; 104, 5 ; 65, 7 ; 36, 9 ]<br />
[ - , ;- ;- , ;- , ;- ]<br />
θ = ° ° ° ° °<br />
θ 2 = 138 6° 90° 133 4° 138 6° 90°<br />
[ - , ; , ;- , ;- , ;- ]<br />
[ 138, 6 ; 90 ; 133, 4 ; 138, 6 ; 90 ]<br />
θ 1 = 65 7° 36 9° 104 5° 155 7° 90°<br />
θ = ° ° ° ° °<br />
2
RS-Ü3 Aufgabe 2<br />
θ 1<br />
θ 2<br />
θ 3<br />
Winkel in °<br />
geg.:<br />
a 1 = a 2 = a 3 = 1<br />
φ = 0°<br />
Konfiguration 1 (Ellbogen oben):<br />
�� <strong>Berechnungen</strong> <strong>mit</strong> <strong>MATLAB</strong>-<strong>Skript</strong> <strong>invkin</strong>_<strong>3gelenk</strong>.m <strong>ausgeführt</strong>!<br />
Sequenzen der Gelenkvariablen θ 1 , θ 2 , θ 3<br />
= [ 150,0°; 134,9°; 119,4°; 104,4°; 90,0°; 96,9°; 75,5°; 10,3°; -30,0°; -17,0°; -7,4°; -1,8°; 0,0°]<br />
= [-120,0°;-118,0°;-112,0°;-102,6°;-90,0°;-126,4°;-151,0°;-147,5°;-120,0°;-118,0°;-112,0°;-102,6°;-90,0°]<br />
= [ -30,0°; -17,0°; -7,4°; -1,8°; 0,0°; 29,5°; 75,5°; 137,2°; 150,0°; 134,9°; 119,4°; 104,4°; 90,0°]<br />
150<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
Gelenkwinkel - Ellbogen oben<br />
θ1 θ2 θ3 Σθi -200<br />
0 2 4 6 8 10 12 14<br />
Position p<br />
Ti<br />
y<br />
1<br />
0.5<br />
0<br />
-0.5<br />
-1<br />
-1 -0.5 0 0.5 1 1.5 2<br />
x
RS-Ü3 Aufgabe 2<br />
θ 1<br />
θ 2<br />
θ 3<br />
Winkel in °<br />
Konfiguration 1 (Ellbogen unten):<br />
= [ 30,0°; 17,0°; 7,4°; 1,8°; -0,0°; -29,5°; -75,5°;-137,2°;-150,0°;-134,9°;-119,4°;-104,4°;-90,0°]<br />
= [ 120,0°; 118,0°; 112,0°; 102,6°; 90,0°; 126,4°; 151,0°; 147,5°; 120,0°; 118,0°; 112,0°; 102,6°; 90,0°]<br />
= [-150,0°;-134,9°;-119,4°;-104,4°;-90,0°; -96,9°; -75,5°; -10,3°; 30,0°; 17,0°; 7,4°; 1,8°; 0,0°]<br />
200<br />
150<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
Gelenkwinkel - Ellbogen unten<br />
-200<br />
0 2 4 6 8 10 12 14<br />
Position p<br />
Ti<br />
θ1 θ2 θ3 Σθi y<br />
1.5<br />
1<br />
0.5<br />
0<br />
-0.5<br />
-1<br />
-1.5<br />
-1 -0.5 0 0.5 1 1.5 2 2.5<br />
x
RS-Ü3 Aufgabe 3<br />
geg.:<br />
d 1 = d 2 = d 6 = 1<br />
φ = 0°<br />
Konfiguration Arm 1:<br />
θ 1 = [-132,4°;-152,3°;-180°;-205,6°;-222,8°;-205,6°;-180°;-152,3°;-132,4°;-152,3°;-180°;-205,6°;-222,8°]<br />
θ [-81°;-79°;-78,7°;-80,6°;-82,6°;-90°;-101,3°;-111,3°;-115,4°;-120,4°;-121°;-116,5°;-111,2°]<br />
2 =<br />
d = [6,4;5,2;5,1;6,1;7,8;6;5,1;5,5;7;5,9;5,8;6,7;8,3]<br />
3<br />
B<br />
TR =<br />
-1 0 0<br />
0 0 1<br />
0 1 0<br />
p =<br />
Tx<br />
p =<br />
Ty<br />
p =<br />
Tz<br />
[5;5;5;5;5;5;5;5;5;5;5;5;5]<br />
[5;2,5;0;-2,5;-5;-2,5;0;2,5;5;2,5;0;-2,5;-5]<br />
[2;2;2;2;2;1;0;-1;-2;-2;-2;-2;-2]<br />
Konfiguration Arm 2:<br />
θ 1 = [29,7°; 5,7°;-22,6°;-44,4°;-57,6°;-44,4°;-22,6°; 5,7°;29,7°; 5,7°;-22,6°;-44,4°;-57,6°]<br />
θ [81°;79°;78,7°;80,6°;82,6°;90°;101,3°;111,3°;115,4°;120,4°;121°;116,5°;111,2°]<br />
2 =<br />
d = [6,4;5,2;5,1;6,1;7,8;6;5,1;5,5;7;5,9;5,8;6,7;8,3]<br />
3<br />
�� <strong>Berechnungen</strong> <strong>mit</strong> <strong>MATLAB</strong>-<strong>Skript</strong> <strong>invkin</strong>_stanford.m <strong>ausgeführt</strong>!<br />
Sequenzen der Gelenkvariablen θ 1 , θ 2 , d 3
RS-Ü3 Aufgabe 3<br />
Sequenzen der Gelenkwinkel θ 4 , θ 5 , θ 6<br />
Konfiguration Arm 1 - Handgelenk 1:<br />
θ [-99,7°;-95,8°;-90°;-85,5°;-83,2°;-90°;-90°;-79,2°;-64,8°;-75,1°;-90°;-102°;-108,5°]<br />
4 =<br />
θ [43,1°;62,8°;90°;115,2°;132,4°;115,6°;90°;64,3°;48,1°;66,3°;90°;112,7°;129,3°]<br />
5 =<br />
θ = [13,2°;12,4°;11,3°;10,4°;10°; 0°;-11,3°;-23,8°;-35,1°;-33,5°;-31°;-28,9°;-27,8°]<br />
6<br />
Konfiguration Arm 1 - Handgelenk 2:<br />
θ 4 =<br />
θ 5 =<br />
θ =<br />
6<br />
Konfiguration Arm 2 - Handgelenk 1:<br />
θ [84,9°;88,9°;94,7°;99,1°;101,4°;90°;85,3°;92,1°;103,7°;92,9°;77,9°;66,4°;60,4°]<br />
4 =<br />
θ [60,7°;84,4°;112,2°;133,7°;146,8°;134,4°;112,2°;84,7°;63,4°;85,1°;109,3°;128,8°;141,9°]<br />
5 =<br />
θ = [10,3°;11,1°;12,2°;13,1°;13,5°; 0°;-12,2°;-21,4°;-28,6°;-30,5°;-33°;-34,9°;-35,8°]<br />
6<br />
Konfiguration Arm 2 - Handgelenk 2:<br />
θ 4 =<br />
θ 5 =<br />
θ =<br />
6<br />
[80,3°;84,2°;90°;94,5°;96,8°;90°;90°;100,8°;115,2°;104,9°;90°;78°;71,5°]<br />
[-43,1°;-62,8°;-90°;-115,2°;-132,4°;-115,6°;-90°;-64,3°;-48,1°;-66,3°;-90°;-112,7°;-129,3°]<br />
[-166,8°;-167,6°;-168,7°;-169,6°;-170°;-180°;168,7°;156,2°;144,9°;146,5°;149°;151,1°;152,2°]<br />
[-95,1°;-91,1°;-85,3°;-80,9°;-78,6°;-90°;-94,7°;-87,9°;-76,3°;-87,1°;-102,1°;-113,6°;-119,6°]<br />
[-60,7°;-84,4°;-112,2°;-133,7°;-146,8°;-134,4°;-112,2°;-84,7°;-63,4°;-85,1°;-109,3°;-128,8°;-141,9°]<br />
[-169,7°;-168,9°;-167,8°;-166,9°;-166,5°;-180°;167,8°;158,6°;151,4°;149,5°;147°;145,1°;144,2°]<br />
Beachte: atan2 – Funktion schaltet für θ < –180° Vorzeichen um!