Modellierung und Simulation eines Systems mit Hilfe eines ...
Modellierung und Simulation eines Systems mit Hilfe eines ...
Modellierung und Simulation eines Systems mit Hilfe eines ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Modellierung</strong> <strong>und</strong> <strong>Simulation</strong> <strong>eines</strong> <strong>Systems</strong> <strong>mit</strong> <strong>Hilfe</strong> <strong>eines</strong><br />
geeigneten Werkzeugs<br />
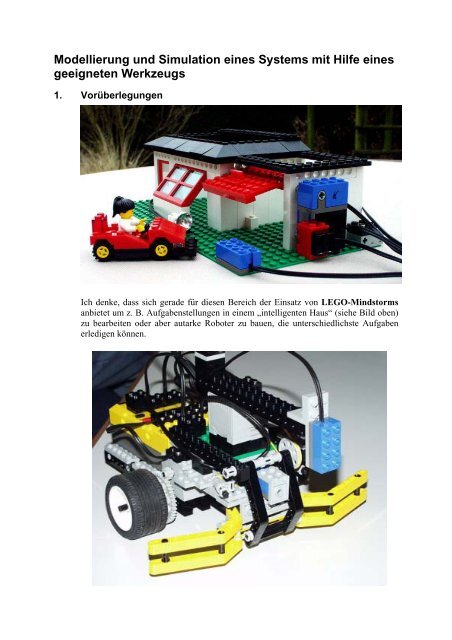
1. Vorüberlegungen<br />
Ich denke, dass sich gerade für diesen Bereich der Einsatz von LEGO-Mindstorms<br />
anbietet um z. B. Aufgabenstellungen in einem „intelligenten Haus“ (siehe Bild oben)<br />
zu bearbeiten oder aber autarke Roboter zu bauen, die unterschiedlichste Aufgaben<br />
erledigen können.
Um sinnvoll arbeiten zu können, ist<br />
natürlich eine gewisse Ausstattung<br />
notwendig. Im Idealfall können drei<br />
Schüler <strong>mit</strong> einem Kasten bauen. Die<br />
noch notwendige Software muss im<br />
Fall von Robolab eigens gekauft<br />
werden, wobei bei einer Schullizenz<br />
die Software auch an die Schüler<br />
verteilt werden darf.<br />
Die Kästen beinhalten neben vielen<br />
Bauteilen den programmierbaren<br />
Baustein RCX, Motoren <strong>und</strong><br />
verschiedene Sensoren.<br />
<strong>Modellierung</strong> <strong>und</strong> <strong>Simulation</strong> <strong>eines</strong> <strong>Systems</strong> - Seite 2
<strong>Modellierung</strong> <strong>und</strong> <strong>Simulation</strong> <strong>eines</strong> <strong>Systems</strong> - Seite 3<br />
2. Die Programmierung des RCX<br />
Für die Programmierung des RCX gibt es verschiedene Möglichkeiten, wobei ich drei<br />
kurz vorstellen möchte. Bei den Kästen aus dem Spielzeughandel ist eine grafische<br />
Programmierumgebung dabei, das „Robotic Invention System“, kurz RIS genannt.<br />
Bei dieser Software werden die einzelnen Programmteile wie aus Legosteinen<br />
zusammengesetzt. Die Befehle sind in sieben Boxen zusammengefasst.<br />
• Große Blöcke<br />
• Kleine Blöcke<br />
• Eigene Blöcke<br />
• Warten<br />
• Wiederholungen<br />
• Ja <strong>und</strong> Nein<br />
• Sensoren<br />
vorgegebene Unterprogramme<br />
Steuerung der Ausgänge<br />
selbst erstellte große Blöcke<br />
Warte <strong>und</strong> Warte bis Ereignis<br />
n mal, ständig, bis, während<br />
Verzweigungen<br />
parallele Tasks, die ständig überprüft werden<br />
Spezielle Angebote für Schulen beinhalten keine Software, die grafische<br />
Programmierumgebung „Robolab“ muss eigens erworben werden. Allerdings<br />
beinhaltet die Schullizenz (ca. 175 €) auch die Möglichkeit, die Software an die<br />
Schüler zu verteilen. Robolab ist mächtiger <strong>und</strong> professioneller als RIS, manchmal<br />
aber auch unübersichtlicher. Auch bei dieser Software wird grafisch gearbeitet.<br />
Robolab bietet beim Hauptprogramm drei Optionen: Administrator, Programmer <strong>und</strong><br />
Investigator. (Investigator dient zur Messwerterfassung <strong>und</strong> wird von uns nicht<br />
genutzt.) Inventor 4 beim Programmer ist die Programmierumgebung <strong>mit</strong> den meisten<br />
Möglichkeiten. Das nachfolgende Beispiel zeigt wie ein Garagentor über eine<br />
Lichtschranke geöffnet wird, sich nach kurzer Zeit automatisch schließt <strong>und</strong> über<br />
einen Tastsensor auch von Hand geöffnet werden kann. Mit dem Projektset „Das<br />
intelligente Haus“ bauen <strong>und</strong> erforschen die Schüler ein computergesteuertes Haus <strong>mit</strong><br />
realitätsnahen Funktionen wie automatische Garagentore, sensorgesteuerte<br />
Alarmanlagen oder Ventilatoren, etc.
Die dritte Möglichkeit der Programmierung<br />
besteht in der Verwendung der textbasierten<br />
Programmiersprache „NQC“ (Not Quite C), die<br />
frei im Internet geladen werden kann. Zur<br />
besseren Bedienung gibt es auch freie Editoren<br />
(siehe Materialdownload).<br />
Das dargestellte Programm schaltet die<br />
Motoren an A <strong>und</strong> C für 4 Sek<strong>und</strong>en ein, lässt<br />
sie dann 4 Sek<strong>und</strong>en rückwärts laufen <strong>und</strong><br />
schaltet sie aus.<br />
<strong>Modellierung</strong> <strong>und</strong> <strong>Simulation</strong> <strong>eines</strong> <strong>Systems</strong> - Seite 4<br />
Eine Ansteuerung der verschiedenen Sensoren soll auch ohne den RCX über das<br />
LOGO!-Modul von Siemens <strong>und</strong> „LOGO! Teach“ möglich sein. Dazu wird zur Zeit<br />
eine spezielle Platine durch die Firma Wükro entwickelt (www.wuekro.de). Eine<br />
interessante Präsentation über das LOGO!-Modul finden sie im nächsten Abschnitt.<br />
3. Materialien<br />
Im Internet gibt es zahlreiches Material zu den Bereichen LEGO Mindstorms <strong>und</strong><br />
Robotik. Für die hier zum Download bereitgestellten Materialien möchte ich mich<br />
ganz herzlich bedanken bei Frau Christine Streib, Johann-Schöner-Gymnasium<br />
Karlstadt, Herrn Martin Bader, Illertal-Gymnasium Vöhringen, Herrn Günter Häusler,<br />
Gymnasium Wertingen, <strong>und</strong> Herrn Bernhard Wiesner, Akademie Dillingen.<br />
Bauanleitungen: bauanleitungen.zip<br />
Robotic Invention System (RIS): ris.zip<br />
rcx_code20_anleitung.zip<br />
Robolab: robotik.zip<br />
robolab_anweisungen.zip<br />
robolab.zip<br />
robolab-programme.zip<br />
NQC: nqc.zip<br />
mqc_<strong>mit</strong>_usb.zip<br />
Siemens LOGO!: logo.zip
4. Links<br />
Robolab Kurs –<br />
Gym. Wertingen<br />
Robotics<br />
Compentence<br />
Center Illertal<br />
Arbeitskreis<br />
RoboCup<br />
<strong>Modellierung</strong> <strong>und</strong> <strong>Simulation</strong> <strong>eines</strong> <strong>Systems</strong> - Seite 5<br />
http://www.gymnasiumwertingen.de/deutsch/fachbereiche/informatik/material/RoboLab/<br />
index.html<br />
http://www.rocci.net/main.php?language=de<br />
http://www.ki.informatik.hu-berlin.de/AKRoboCup/index.shtml<br />
Robotics http://www.sc.shuttle.de/sc/akg/robotics/Kurs/<br />
ETH Zürich http://www.tik.ee.ethz.ch/mindstorms/<br />
Lego<br />
Mindstorms<br />
Lego Robot<br />
Pages<br />
http://mindstorms.lego.com/eng/default.asp<br />
http://www.cs.uu.nl/people/markov/lego/index.html<br />
NQC http://www.baumfamily.org/nqc/<br />
NQC Anleitung<br />
in deutsch<br />
Deutsche<br />
Übersetzung des<br />
NQC<br />
First Lego<br />
League<br />
(Deutschland)<br />
http://www.uni-bamberg.de/~ba2dp2/lehrmaterial/roboter/RCXCCtutorial.pdf<br />
http://lug.mfh-iserlohn.de/lego/<br />
http://www.legoleague.org/de/<br />
Links (englisch) http://www.smallrobots.de/link.html<br />
Links der TU<br />
München<br />
http://wwwbrauer.in.tum.de/lehre/lego/prog_prakt_lego_links.<br />
shtml<br />
Links (deutsch) http://www.informatik.gierhardt.de/mindstorms/index.html<br />
Links (deutsch) http://mv-sirius.m.fh-offenburg.de/Robotik/Links.htm<br />
LegoKara http://www.educeth.ch/informatik/karatojava/legokara/<br />
Technik LPE http://www.technik-lpe.de/legodacta/newsletter/<br />
LOGO!-Modul<br />
Uni Münster<br />
http://www.unimuenster.de/Physik/TD/Uvortec/Information/LOGO/Titelseite.htm