Atomic Force Microscopy in Cancer Cell Research - Clarkson ...
Atomic Force Microscopy in Cancer Cell Research - Clarkson ...
Atomic Force Microscopy in Cancer Cell Research - Clarkson ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2 <strong>Atomic</strong> <strong>Force</strong> <strong>Microscopy</strong> <strong>in</strong> <strong>Cancer</strong> <strong>Cell</strong> <strong>Research</strong><br />
present state of research <strong>in</strong> this area. There are many different<br />
<strong>in</strong>terest<strong>in</strong>g results but without a unify<strong>in</strong>g protocol. One<br />
of the purposes of this review is to help develop such a<br />
protocol.<br />
1.1. Pr<strong>in</strong>ciples of AFM<br />
AFM is a relatively novel method. It was <strong>in</strong>vented <strong>in</strong> 1986<br />
as the first new extension of scann<strong>in</strong>g probe microscopy<br />
(which first appeared <strong>in</strong> 1981 <strong>in</strong> the guise of scann<strong>in</strong>g tunnel<strong>in</strong>g<br />
microscopy) [50]. Its technique is based on detection<br />
of forces act<strong>in</strong>g between a sharp probe, known as AFM tip,<br />
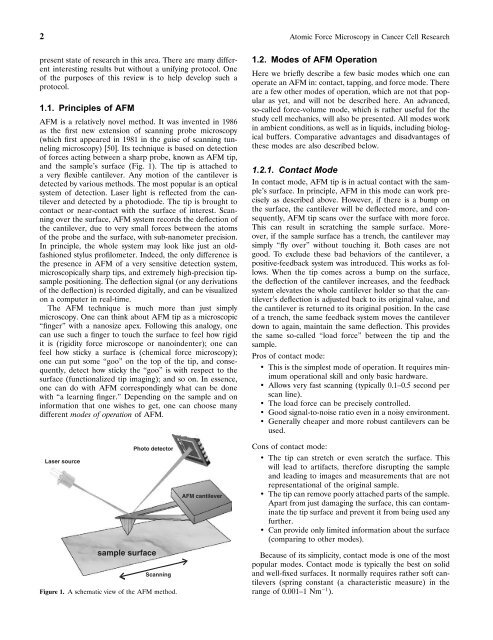
and the sample’s surface (Fig. 1). The tip is attached to<br />
a very flexible cantilever. Any motion of the cantilever is<br />
detected by various methods. The most popular is an optical<br />
system of detection. Laser light is reflected from the cantilever<br />
and detected by a photodiode. The tip is brought to<br />
contact or near-contact with the surface of <strong>in</strong>terest. Scann<strong>in</strong>g<br />
over the surface, AFM system records the deflection of<br />
the cantilever, due to very small forces between the atoms<br />
of the probe and the surface, with sub-nanometer precision.<br />
In pr<strong>in</strong>ciple, the whole system may look like just an oldfashioned<br />
stylus profilometer. Indeed, the only difference is<br />
the presence <strong>in</strong> AFM of a very sensitive detection system,<br />
microscopically sharp tips, and extremely high-precision tipsample<br />
position<strong>in</strong>g. The deflection signal (or any derivations<br />
of the deflection) is recorded digitally, and can be visualized<br />
on a computer <strong>in</strong> real-time.<br />
The AFM technique is much more than just simply<br />
microscopy. One can th<strong>in</strong>k about AFM tip as a microscopic<br />
“f<strong>in</strong>ger” with a nanosize apex. Follow<strong>in</strong>g this analogy, one<br />
can use such a f<strong>in</strong>ger to touch the surface to feel how rigid<br />
it is (rigidity force microscope or nano<strong>in</strong>denter); one can<br />
feel how sticky a surface is (chemical force microscopy);<br />
one can put some “goo” on the top of the tip, and consequently,<br />
detect how sticky the “goo” is with respect to the<br />
surface (functionalized tip imag<strong>in</strong>g); and so on. In essence,<br />
one can do with AFM correspond<strong>in</strong>gly what can be done<br />
with “a learn<strong>in</strong>g f<strong>in</strong>ger.” Depend<strong>in</strong>g on the sample and on<br />
<strong>in</strong>formation that one wishes to get, one can choose many<br />
different modes of operation of AFM.<br />
Laser source<br />
Photo detector<br />
sample surface<br />
Scann<strong>in</strong>g<br />
Figure 1. A schematic view of the AFM method.<br />
AFM cantilever<br />
1.2. Modes of AFM Operation<br />
Here we briefly describe a few basic modes which one can<br />
operate an AFM <strong>in</strong>:contact, tapp<strong>in</strong>g, and force mode. There<br />
are a few other modes of operation, which are not that popular<br />
as yet, and will not be described here. An advanced,<br />
so-called force-volume mode, which is rather useful for the<br />
study cell mechanics, will also be presented. All modes work<br />
<strong>in</strong> ambient conditions, as well as <strong>in</strong> liquids, <strong>in</strong>clud<strong>in</strong>g biological<br />
buffers. Comparative advantages and disadvantages of<br />
these modes are also described below.<br />
1.2.1. Contact Mode<br />
In contact mode, AFM tip is <strong>in</strong> actual contact with the sample’s<br />
surface. In pr<strong>in</strong>ciple, AFM <strong>in</strong> this mode can work precisely<br />
as described above. However, if there is a bump on<br />
the surface, the cantilever will be deflected more, and consequently,<br />
AFM tip scans over the surface with more force.<br />
This can result <strong>in</strong> scratch<strong>in</strong>g the sample surface. Moreover,<br />
if the sample surface has a trench, the cantilever may<br />
simply “fly over” without touch<strong>in</strong>g it. Both cases are not<br />
good. To exclude these bad behaviors of the cantilever, a<br />
positive-feedback system was <strong>in</strong>troduced. This works as follows.<br />
When the tip comes across a bump on the surface,<br />
the deflection of the cantilever <strong>in</strong>creases, and the feedback<br />
system elevates the whole cantilever holder so that the cantilever’s<br />
deflection is adjusted back to its orig<strong>in</strong>al value, and<br />
the cantilever is returned to its orig<strong>in</strong>al position. In the case<br />
of a trench, the same feedback system moves the cantilever<br />
down to aga<strong>in</strong>, ma<strong>in</strong>ta<strong>in</strong> the same deflection. This provides<br />
the same so-called “load force” between the tip and the<br />
sample.<br />
Pros of contact mode:<br />
• This is the simplest mode of operation. It requires m<strong>in</strong>imum<br />
operational skill and only basic hardware.<br />
• Allows very fast scann<strong>in</strong>g (typically 0.1–0.5 second per<br />
scan l<strong>in</strong>e).<br />
• The load force can be precisely controlled.<br />
• Good signal-to-noise ratio even <strong>in</strong> a noisy environment.<br />
• Generally cheaper and more robust cantilevers can be<br />
used.<br />
Cons of contact mode:<br />
• The tip can stretch or even scratch the surface. This<br />
will lead to artifacts, therefore disrupt<strong>in</strong>g the sample<br />
and lead<strong>in</strong>g to images and measurements that are not<br />
representational of the orig<strong>in</strong>al sample.<br />
• The tip can remove poorly attached parts of the sample.<br />
Apart from just damag<strong>in</strong>g the surface, this can contam<strong>in</strong>ate<br />
the tip surface and prevent it from be<strong>in</strong>g used any<br />
further.<br />
• Can provide only limited <strong>in</strong>formation about the surface<br />
(compar<strong>in</strong>g to other modes).<br />
Because of its simplicity, contact mode is one of the most<br />
popular modes. Contact mode is typically the best on solid<br />
and well-fixed surfaces. It normally requires rather soft cantilevers<br />
(spr<strong>in</strong>g constant (a characteristic measure) <strong>in</strong> the<br />
range of 0.001–1 Nm −1 ).