

Kalman Filtering Tutorial
Kalman Filtering Tutorial
Kalman Filtering Tutorial

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
⎡1<br />
1⎤<br />
⎡0.5⎤<br />
x(k +1) = ⎢ x(k)<br />
+<br />
⎣0<br />
1<br />
⎥ ⎢ ⎥<br />
⎦ ⎣ ⎦<br />
F x G u<br />
− ( g)<br />
1<br />
= ( k)<br />
+<br />
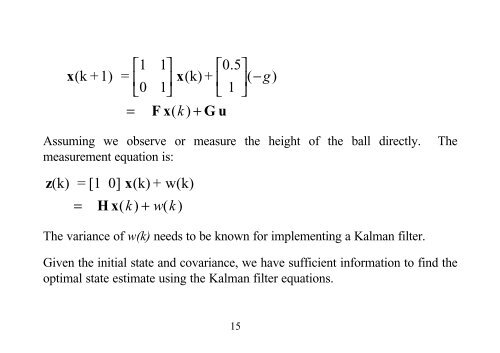
Assuming we observe or measure the height of the ball directly. The<br />
measurement equation is:<br />
z(k) = [1 0] x(k)<br />
+ w(k)<br />
= H x(<br />
k) + w( k)<br />
The variance of w(k) needs to be known for implementing a <strong>Kalman</strong> filter.<br />
Given the initial state and covariance, we have sufficient information to find the<br />
optimal state estimate using the <strong>Kalman</strong> filter equations.<br />
15