

Kalman Filtering Tutorial
Kalman Filtering Tutorial
Kalman Filtering Tutorial

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
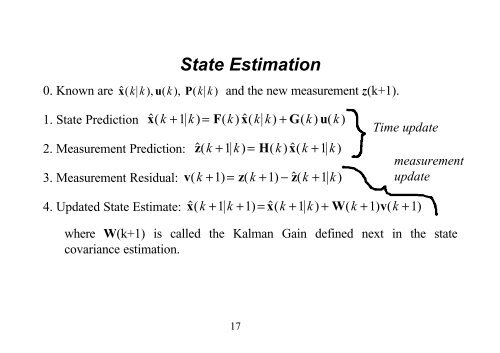
State Estimation<br />
0. Known are x$( k| k), u( k), P(<br />
k| k ) and the new measurement z(k+1).<br />
1. State Prediction x$( k + 1|<br />
k ) = F( k ) x$( k| k) + G( k ) u(<br />
k )<br />
2. Measurement Prediction: z$( k + 1| k ) = H( k ) x$(<br />
k + 1|<br />
k )<br />
3. Measurement Residual: v( k + 1) = z( k + 1) − z$(<br />
k + 1|<br />
k )<br />
4. Updated State Estimate: x$( k + 1| k + 1) = x$( k + 1| k ) + W( k + 1) v(<br />
k + 1)<br />
where W(k+1) is called the <strong>Kalman</strong> Gain defined next in the state<br />
covariance estimation.<br />
17<br />
Time update<br />
measurement<br />
update