Development of a Flapping Wing Mechanism - Student Projects
Development of a Flapping Wing Mechanism - Student Projects
Development of a Flapping Wing Mechanism - Student Projects

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Oliver Breitenstein<br />
<strong>Development</strong> <strong>of</strong> a <strong>Flapping</strong><br />
<strong>Wing</strong> <strong>Mechanism</strong><br />
Semester Project<br />
Autonomous Systems Lab (ASL)<br />
Swiss Federal Institute <strong>of</strong> Technology (ETH) Zurich<br />
Supervision<br />
Dr. Samir Bouabdallah, Stefan Leutenegger<br />
and<br />
Pr<strong>of</strong>. Dr. Roland Siegwart<br />
Spring Semester 2009
Contents<br />
Abstract iii<br />
Acknowledgements iv<br />
1 Introduction 1<br />
2 Review 3<br />
2.1 Aerodynamics <strong>of</strong> flapping wings . . . . . . . . . . . . . . . . . . . . . 3<br />
2.1.1 Wagner Effect . . . . . . . . . . . . . . . . . . . . . . . . . . . 3<br />
2.1.2 Leading edge vortex . . . . . . . . . . . . . . . . . . . . . . . 3<br />
2.1.3 Clap and fling mechanism . . . . . . . . . . . . . . . . . . . . 4<br />
2.1.4 Rotational lift . . . . . . . . . . . . . . . . . . . . . . . . . . . 5<br />
2.1.5 <strong>Wing</strong>-wake interactions . . . . . . . . . . . . . . . . . . . . . 6<br />
2.1.6 Lift force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6<br />
2.2 <strong>Flapping</strong> wings in nature . . . . . . . . . . . . . . . . . . . . . . . . 7<br />
2.2.1 Insects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7<br />
2.2.2 Hummingbirds . . . . . . . . . . . . . . . . . . . . . . . . . . 10<br />
2.2.3 Bats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13<br />
2.2.4 Birds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16<br />
2.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17<br />
3 Concepts 21<br />
3.1 General Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . 21<br />
3.1.1 Objective characteristics . . . . . . . . . . . . . . . . . . . . . 21<br />
3.1.2 Flight control . . . . . . . . . . . . . . . . . . . . . . . . . . . 22<br />
3.1.3 Actuator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22<br />
3.2 Concepts for wing flapping . . . . . . . . . . . . . . . . . . . . . . . 23<br />
3.2.1 Concept A . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23<br />
3.2.2 Concept B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24<br />
3.2.3 Concept C . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25<br />
3.2.4 Concept D . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29<br />
3.3 Concepts for wing pitching . . . . . . . . . . . . . . . . . . . . . . . 29<br />
3.3.1 Active pitching . . . . . . . . . . . . . . . . . . . . . . . . . . 29<br />
3.3.2 Passive pitching . . . . . . . . . . . . . . . . . . . . . . . . . 32<br />
4 Evaluation 35<br />
4.1 Evaluation <strong>of</strong> concepts . . . . . . . . . . . . . . . . . . . . . . . . . . 35<br />
4.1.1 Criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35<br />
4.1.2 <strong>Flapping</strong> concepts . . . . . . . . . . . . . . . . . . . . . . . . 36<br />
4.1.3 Pitching concepts . . . . . . . . . . . . . . . . . . . . . . . . . 36<br />
4.2 Expected weight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37<br />
4.3 Expected power consumption . . . . . . . . . . . . . . . . . . . . . . 38<br />
i
5 CAD Design 39<br />
5.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39<br />
5.2 Transmission <strong>of</strong> motor torque . . . . . . . . . . . . . . . . . . . . . . 40<br />
5.3 Joints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41<br />
6 Conclusion 43<br />
A Motor datasheet 45<br />
ii
Abstract<br />
This project aims at the development <strong>of</strong> a bio-mimetic propulsion mechanism for<br />
a <strong>Flapping</strong> <strong>Wing</strong> Micro Aerial Vehicle, without considering the aerodynamics <strong>of</strong><br />
the wings in the design. This artificial bird will be the size <strong>of</strong> approximately 10-<br />
20cm. Therefor the aerodynamic phenomena in flapping flight are studied and<br />
summarized. It covers the leading-edge vortex (LEV), the clap-and-fling effect,<br />
rotational lift and wing wake interactions. This is followed by a review <strong>of</strong> natural<br />
flappers. The aerodynamic and kinematic pattern <strong>of</strong> hummingbirds, bats, insects<br />
and small birds are summarized. Based on this review several different concepts <strong>of</strong><br />
mechanisms for flapping wings are generated, which are seperated for the flapping<br />
motion and the pitching motion. Using a qualitative evaluation, the quality <strong>of</strong><br />
the concepts are determined according to different criteria such as weight, size,<br />
robustness, mechanical complexity, expected power consumption and accuracy. The<br />
best concept is used as basis for a 3D CAD design <strong>of</strong> the mechanism, which should<br />
mainly reproduce the desired kinematics. During the design process the focus is<br />
set more on getting a robust and simple mechanism, which could be used as a test<br />
bench for further investigations and measurements. Concluding, the mechanism is<br />
manufactured and assembled to prove the feasibility.<br />
iii
Acknowledgements<br />
I’d like to thank Dr. Samir Bouabdallah and Stefan Leutenegger for their good<br />
guidance and the useful inputs they contributed. Specially during the last part, the<br />
CAD-Design, when time was short, their experience was very supportive. Also I’d<br />
like to thank Dr. Bret Tobalske from the University <strong>of</strong> Montana and Maria Jose<br />
<strong>of</strong> Berkeley, giving me deeper informations about the hummingbird flight, which<br />
helped me alot understanding the crucial parts <strong>of</strong> it for developing a mimicking<br />
flapping device.<br />
iv
List <strong>of</strong> Figures<br />
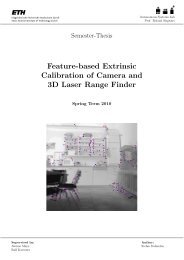
1.1 Schematic drawing <strong>of</strong> DelFly I taken from www.delfly.nl . . . . . . . 1<br />
1.2 <strong>Flapping</strong> wing mechanism <strong>of</strong> ROBUR taken from IROS 2007 www.flyingrobots.org 2<br />
2.1 Leading edge vortex on the wing[19] . . . . . . . . . . . . . . . . . . 4<br />
2.2 Evolution <strong>of</strong> a leading edge vortex in (A) two dimensions and (B)<br />
three dimensions during linear translation starting from rest [19] . . 4<br />
2.3 Schematic representation <strong>of</strong> the clap (A-C) and fling (D-F) [19] . . . 5<br />
2.4 Three phases <strong>of</strong> the wing rotation [7] . . . . . . . . . . . . . . . . . . 5<br />
2.5 <strong>Wing</strong>-wake interaction during stroke reversal [19] . . . . . . . . . . . 6<br />
2.6 Flight forces for the drosophila during hovering [21] . . . . . . . . . . 7<br />
2.7 General pattern for the wing motion <strong>of</strong> Drosophila Melanogaster [16] 8<br />
2.8 Kinematics <strong>of</strong> Drosophila Melanogaster [9] . . . . . . . . . . . . . . . 8<br />
2.9 Force production in two cycles [16] . . . . . . . . . . . . . . . . . . . 9<br />
2.10 <strong>Wing</strong> motion relative to the body flying at velocities <strong>of</strong> 0 − 12ms −1 [2] 10<br />
2.11 Angles describing bird-centered wing and body kinematics in rufous<br />
hummingbirds [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11<br />
2.12 Variation <strong>of</strong> chord angle relative to body-plane during wingbeats at<br />
velocities <strong>of</strong> 0 − 12ms −1 [2] . . . . . . . . . . . . . . . . . . . . . . . 12<br />
2.13 Wake structures in frontal and side plane [17] . . . . . . . . . . . . . 13<br />
2.14 Flow field vorticity at end <strong>of</strong> upstroke, (a) frontal view at shoulderplane,<br />
(b) side view at midwing-plane [17] . . . . . . . . . . . . . . . 13<br />
2.15 Anatomical structure <strong>of</strong> the bat wing [5] . . . . . . . . . . . . . . . . 14<br />
2.16 Sequences <strong>of</strong> images from below and in front <strong>of</strong> bat during on cycle<br />
starting at beginning <strong>of</strong> the downstroke [6] . . . . . . . . . . . . . . . 14<br />
2.17 Example trajectories <strong>of</strong> the different wing regions for 3m/s (left) and<br />
9m/s (right) [5] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
2.18 Example <strong>of</strong> wing tip motion [6] . . . . . . . . . . . . . . . . . . . . . 15<br />
2.19 Velocity and vorticity fields around a bat wing in slow forward flight<br />
(1 m/s) at the time instance when the wing is in horizontal position<br />
during the downstroke [10] . . . . . . . . . . . . . . . . . . . . . . . . 15<br />
2.20 <strong>Wing</strong>span ratio as a function <strong>of</strong> flight velocity compared among bird<br />
species [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16<br />
2.21 Representative wing kinematics in a zebra finch engaged in flapbounding<br />
flight at 2m/s (A) and 12m/s (B) [4] . . . . . . . . . . . . 17<br />
3.1 Schematic drawing <strong>of</strong> concept A1 . . . . . . . . . . . . . . . . . . . . 23<br />
3.2 Sketch for kinematics <strong>of</strong> general structure for the flapping motion . . 24<br />
3.3 Trajectories <strong>of</strong> centered joint for one cycle for different ratios L/r . . 24<br />
3.4 Schematic drawing <strong>of</strong> concept A2 . . . . . . . . . . . . . . . . . . . . 25<br />
3.5 Schematic drawing <strong>of</strong> concept B1 (left) and B2 (right) . . . . . . . . 25<br />
3.6 Schematic drawing <strong>of</strong> concept C . . . . . . . . . . . . . . . . . . . . . 26<br />
3.7 Calculation <strong>of</strong> the bending line . . . . . . . . . . . . . . . . . . . . . 26<br />
3.8 Sketch for calculation <strong>of</strong> the dynamics . . . . . . . . . . . . . . . . . 27<br />
v
3.9 Results <strong>of</strong> the force on the link and the needed torque during one<br />
flapping cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28<br />
3.10 Schematic drawing <strong>of</strong> concept D . . . . . . . . . . . . . . . . . . . . 29<br />
3.11 Actively adapting pitch angle using the trailing edge . . . . . . . . . 30<br />
3.12 Geometric sketch for calculations <strong>of</strong> the trailing edge motion . . . . 30<br />
3.13 Left: Trajectories <strong>of</strong> leading edge, traling edge and chord angle,<br />
Right: Shifted graph for the leading edge motion for comparison<br />
<strong>of</strong> the harmoinc behaviour <strong>of</strong> the trailing edge’s motion . . . . . . . 31<br />
3.14 Actively adapting pitch angle using the leading edge . . . . . . . . . 31<br />
3.15 Simulated chord angle for horizontal actuation <strong>of</strong> wing rod . . . . . . 32<br />
3.16 Sketch <strong>of</strong> general principle for passive pitching at the hinge . . . . . 33<br />
3.17 Passive pitching done at the wings . . . . . . . . . . . . . . . . . . . 33<br />
4.1 Structure <strong>of</strong> the wing . . . . . . . . . . . . . . . . . . . . . . . . . . . 38<br />
5.1 Overview <strong>of</strong> resulting mechanism . . . . . . . . . . . . . . . . . . . . 40<br />
5.2 Connection <strong>of</strong> motor to rotating link . . . . . . . . . . . . . . . . . . 40<br />
5.3 Design for guiding the center joint . . . . . . . . . . . . . . . . . . . 41<br />
5.4 Assembly <strong>of</strong> wing joint . . . . . . . . . . . . . . . . . . . . . . . . . . 42<br />
5.5 Structure <strong>of</strong> the wing attachments . . . . . . . . . . . . . . . . . . . 42<br />
vi
Chapter 1<br />
Introduction<br />
Over the past twenty-five years interest in small unmanned aerial vehicles has greatly<br />
increased. Specially for reconnaissance and surveillance missions these vehicles are<br />
<strong>of</strong> great use. Most <strong>of</strong> them, which are used today incorporate traditional methods<br />
for lift and thrust, a propeller for thrust and fixed wings with an appropriate pr<strong>of</strong>ile<br />
to gain enough lift. Also rotary drive systems as can be seen by helicopters are used<br />
by some. However natural flying creatures are still superiour in terms <strong>of</strong> manoeuverability,<br />
lightweight and endurance.<br />
This fact motivates to find a MAV, which mimics the flapping motion <strong>of</strong> small birds,<br />
bats or insect, to have the same advantages. Also the improving technology, for instance<br />
lightweight and robust materials and better batteries, make this task more<br />
feasible and therefor the field <strong>of</strong> research <strong>of</strong> <strong>Flapping</strong> <strong>Wing</strong> MAVs has increased<br />
remarkably over the past years.<br />
Several <strong>Flapping</strong> <strong>Wing</strong> MAVs are already developed. The most successful is the<br />
DelFly, which has been realised by a group <strong>of</strong> undergraduate students at TU Delft<br />
in the Netherlands. Many other vehicles built so far use two wings, as it can be<br />
observed in nature at birds. DelFly is more a copy <strong>of</strong> the dragonfly, it uses two pairs<br />
<strong>of</strong> wings (see figure 1.1). The wings flap in counterphase and almost touch each<br />
other when they come together, for which reason it is assumed that it makes use <strong>of</strong><br />
the clap-and-fling effect (Chapter 2.1.3). However the question, why this concept<br />
works so well is still open, the investigations and measurements to reveal the secret<br />
have just started.<br />
Figure 1.1: Schematic drawing <strong>of</strong> DelFly I taken from www.delfly.nl<br />
1
Chapter 1. Introduction 2<br />
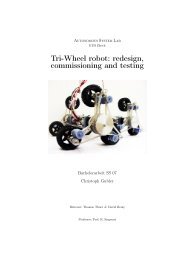
Other UAVs are yet less successful compared to the DelFly. However some other<br />
promising projects are still ongoing. For instance ROBUR from the University <strong>of</strong><br />
Paris, France. It has bigger dimensions, comparable to them <strong>of</strong> a seagull, and uses<br />
a more heavy and complex mechanism (figure 1.2), but again can perform much<br />
more wing motions. It can independently control the pitch angle <strong>of</strong> the wing and<br />
the flapping speed.<br />
Figure 1.2: <strong>Flapping</strong> wing mechanism <strong>of</strong> ROBUR taken from IROS 2007<br />
www.flyingrobots.org<br />
Another project from the University <strong>of</strong> California, Berkely, which investigates smaller<br />
dimensions is the robotic insect <strong>of</strong> Robert Wood [24]. It is at-scale <strong>of</strong> insects and<br />
has a fascinating lift production for this small scale. However longer flights are not<br />
possible, as the lift is indeed enough to let the Robotic insect fly, but also to carry<br />
a battery and control modules is due to limitations <strong>of</strong> the actual technology not yet<br />
possible.<br />
In the following chapters, it is presented how a flapping wing mechanism for an<br />
artificial bird with a size <strong>of</strong> approximately 20cm is developped. This project is the<br />
first step into this direction. Therefor in chapter 2 a detailed literature review is<br />
done to see which natural flapping flyer is most suitable for mimicking. Also briefly<br />
the general aerodynamic phenomena <strong>of</strong> flapping wings are summarised, which have<br />
to be considered and could give useful inputs. The result <strong>of</strong> this investigation is<br />
then used as a starting point to generate different concepts (chapter 3), without<br />
going too deep into the design and only theoretical calculations are done to check<br />
the feasibility. In chapter 4 the concept are compared with each other and the best<br />
is chosen to design in 3D CAD, which is briefly described in chapter 5.
Chapter 2<br />
Review<br />
2.1 Aerodynamics <strong>of</strong> flapping wings<br />
Compared to fixed wing flight, flapping the wings induce in general different aerodynamic<br />
phenomena. Most <strong>of</strong> the airflow is turbulent and due to permanently<br />
changed wing position and orientation, more the unsteady aerodynamics have to<br />
be considered. Because these informations could be <strong>of</strong> use for the development <strong>of</strong> a<br />
flapping wing mechanism, in this section shortly the main aerodynamics phenomena<br />
<strong>of</strong> flapping wings are described, using [11] as main input.<br />
2.1.1 Wagner Effect<br />
When a wing with a high angle <strong>of</strong> attack starts suddenly to move, the airflow vortices<br />
do not immediately get their steadystate value. The circulation slowly approaches<br />
to it. This delay results <strong>of</strong> a combination <strong>of</strong> two phenomena [19]. Firstly the fluid<br />
is not perfect, meaning it has a viscous behaviour on the stagnation point and so<br />
it takes some time to establish the Kutta condition. Also during the process the<br />
vorticity is generated and again shed at the trailing edge, while this shed vorticity<br />
forms a starting vortex. The velocity field near the wing, which is induced by the<br />
shed vorticity at the trailing edge counteracts to the bounding <strong>of</strong> the vortex to the<br />
wing. Only when the starting vortex has moved enough far away <strong>of</strong> the trailing<br />
edge, the moved wing gets its maximum circulation. This slow developement <strong>of</strong><br />
circulation was first proposed by Wagner in 1925 and so is called as the Wagner<br />
effect.<br />
Unlike the other unsteady mechanisms described below, this effect is not as strong.<br />
Specially at Reynolds numbers, which are typically for small birds or insects it<br />
can be neglected for flapping wings. However for more detailed studies <strong>of</strong> the<br />
aerodynamics, it is still considered.<br />
2.1.2 Leading edge vortex<br />
One <strong>of</strong> the most important effects for flapping wing flight is the leading edge vortex<br />
(LEV), which is created at high angles <strong>of</strong> attack. Operating the wing at a high angle<br />
<strong>of</strong> attack leads for a steady flow regime to flow separation and stall. However in<br />
unsteady flow, the created vortex at the leading edge, stays attached to the wing for<br />
a great part <strong>of</strong> the downstroke. This attached vortex induces a velocity downwards<br />
and so increases the lift force as shown in figure 2.1. Only when the vorticity <strong>of</strong> the<br />
leading edge vortex gets too large, the flow is not reattached before the trailing edge<br />
any more and a trailing edge vortex is formed, where the wing is in state similar<br />
to stall, which results in a sudden drop <strong>of</strong> lift. This described behaviour, for a<br />
3
Chapter 2. Review 4<br />
Figure 2.1: Leading edge vortex on the wing[19]<br />
Thick black lines indicate the downwash due to the generated vortex system<br />
two-dimensional wing motion, is called dynamic or delayed stall. The evolution <strong>of</strong><br />
the leading edge vortex for a translating wing starting from rest is shown in figure<br />
2.2. For the three-dimensional case as shown in figure 2.2, the leading edge vortex<br />
Figure 2.2: Evolution <strong>of</strong> a leading edge vortex in (A) two dimensions and (B) three<br />
dimensions during linear translation starting from rest [19]<br />
is more stable and no trailing edge vortex forms. Several different studies try to<br />
explain the stability <strong>of</strong> the formed leading edge vortex [12] [3], which is only present<br />
for the three-dimensional case. But still newer studies show, that the LEV has long<br />
been underestimated and is far more complex than assumed so far [13].<br />
2.1.3 Clap and fling mechanism<br />
Another phenomenon is the clap and fling mechanism showed in figure 2.3. Here<br />
the wings come together at the end <strong>of</strong> each upstroke to perform a so called ’clap’.<br />
After the clap the trailing edges <strong>of</strong> the wings stay connected, while the leading edges<br />
are increasing their distance to each other, which is called as ’fling’. So an opening<br />
angle is created. When the wings then start their downstroke, air is sucked into this<br />
funnel-like geometry, which induces a bound vortex at the leading edge <strong>of</strong> each <strong>of</strong><br />
the wings, and each created vortex acts as a starting vortex for the other wing. As<br />
described by Weis-Fogh [22] this annihilation allows the circulation to be builded up<br />
more rapidly, because the Wagner effect (see section 2.1.1) is suppressed. Another
5 2.1. Aerodynamics <strong>of</strong> flapping wings<br />
Figure 2.3: Schematic representation <strong>of</strong> the clap (A-C) and fling (D-F) [19]<br />
Black lines show trajectory <strong>of</strong> the airflow, dark blue arrows represent the by the airflow induced<br />
velocity, light blue arrow shows the net force on the airfoil.<br />
advantage <strong>of</strong> the clap is that the created vortices during upstroke are vanishing<br />
during the clap, they cancel each other out as they are oriented in opposite direction.<br />
Many insects make use <strong>of</strong> the fling to create a rotational airflow circulation, while<br />
the clap is not performed by all insects. According to Ellington [8] the clap is<br />
avoided by most <strong>of</strong> the insects because the permanent clapping can damage the<br />
wings and more a ’almost’ clap is performed. Also for birds similar observations<br />
were made, for instance during the take<strong>of</strong>f <strong>of</strong> pigeons [14]. Although no full clap and<br />
fling is performed, the wings almost touch each other at the back and it is assumed,<br />
that in this way similar air circulations are produced, which give additional lift.<br />
2.1.4 Rotational lift<br />
Near the end <strong>of</strong> every stroke mainly insects but also some small birds (e.g. hummingbirds)<br />
are rotating their wings, which allows to maintain a positive angle <strong>of</strong><br />
attack during the whole wingbeat cylce. The three different phases are shown in<br />
Figure 2.4: Three phases <strong>of</strong> the wing rotation [7]
Chapter 2. Review 6<br />
figure 2.4. The angles <strong>of</strong> attack during downstroke and upstroke are αd and αu respectively.<br />
ω indicates the angular velocity. This rotation at the end <strong>of</strong> each stroke,<br />
also gives additional lift. According to Dickinson the generated lift force strongly<br />
depends on the the position <strong>of</strong> the rotation axis. For instance rotations about the<br />
trailing edge show a better lift generation compared to rotations about the leading<br />
edge for instance. Also the timing <strong>of</strong> the rotation has an effect on the produced lift,<br />
which is analysed for instance in [7].<br />
2.1.5 <strong>Wing</strong>-wake interactions<br />
The back and forth motion <strong>of</strong> the wings used by insects make the wings interact with<br />
the shed vorticity <strong>of</strong> the prior strokes, which acts positively on the lift generation.<br />
Figure 2.5 shows the principle <strong>of</strong> wake capture. At the end <strong>of</strong> the translational<br />
Figure 2.5: <strong>Wing</strong>-wake interaction during stroke reversal [19]<br />
U∞ indicates the freestream velocity, dark blue arrows show the induced velocity field, light blue<br />
arrows presents the aerodynamic force<br />
phase (A), the wing starts the rotation (B), which causes the vortices at the edges<br />
to shed <strong>of</strong>f the wing (C). This induces a strong velocity field, which pushes against<br />
the wing (D) and so increases the lift force at the beginning <strong>of</strong> the next halfstroke<br />
(E). In the following translational phase, again a LEV is created (F). This wingwake<br />
interaction also allows to let the pitch motion <strong>of</strong> the wing done passively, as<br />
this additional lift, at the beginning <strong>of</strong> the stroke, rotates the wing to the desired<br />
orientation, to maintain a positive angle <strong>of</strong> attack.<br />
2.1.6 Lift force<br />
The lift force is produced by the four unsteady effects described above. The most<br />
important one is the LEV, because it is the only one, which is responsible for lift<br />
during the flapping, the translational phases <strong>of</strong> the strokes. The other three effects<br />
enhance the lift production mainly during the rotational phases. In figure 2.6 an<br />
example <strong>of</strong> the generated lift force is shown. During hovering, the horizontal component<br />
<strong>of</strong> the red arrows in figure 2.6 cancel out during one whole stroke cycle. The<br />
vertical component equals the body weight.<br />
Of course the wings play also an important role for the produced lift force. Like for<br />
fixed wing aircraft, the wing pr<strong>of</strong>ile determines lift and drag coefficients (CL and<br />
CD). However for flapping flight, these also differ. For a steady state flow regime,<br />
like for fixed wing aircraft, these two coefficients can be deteremined independently
7 2.2. <strong>Flapping</strong> wings in nature<br />
Figure 2.6: Flight forces for the drosophila during hovering [21]<br />
The red arrows indicate the net forces during down- and upstroke.<br />
from each other. For an unsteady flow field they can not be seperated anymore [11].<br />
<strong>Flapping</strong> flight is usually performed with a high angle <strong>of</strong> attack, to get the above<br />
described LEV, which induces a force normal to the wing surface. Hence the resultant<br />
force is drag- and lift force in one hand. Therefor to have a similar description<br />
as for fixed wing flight Dickinson [20] defined a circulatory coefficient, which can be<br />
merged out <strong>of</strong> the usual drag and lift coefficient.<br />
<br />
CT = C2 D + C2 L<br />
(2.1)<br />
However, this coefficient also has to be determined experimentally. Also for a given<br />
wing pr<strong>of</strong>ile, and known lift- and drag coefficients for a steady flow regime, there<br />
is no way around to obtain the circulatory coefficient, but to make experimental<br />
measurements, because the unsteady effects <strong>of</strong> the flapping flight give different<br />
results.<br />
2.2 <strong>Flapping</strong> wings in nature<br />
For developing a flapping wing mechanism different flying animals are studied. As<br />
the future MAV should have the ability to hover, mainly animals with hovering capabilites<br />
are examined. Also the dimensions should approximately match the MAV,<br />
that for a first approach the feasibility can be taken for granted. Therefor in this<br />
section the wing motions <strong>of</strong> hummingbirds, bats and smaller birds are summarized.<br />
Although insects are much smaller and will not serve as main input for the flapping<br />
wing mechanism, some ideas may be extracted and hence roughly the kinematics<br />
and aerodynamics are summarized by the example <strong>of</strong> the Drosophila fruit fly.<br />
2.2.1 Insects<br />
The stroke shape in flying insects are varying remarkably. The wing tip makes<br />
depending on the insect, different motions. Oval, figure-eight or pear-shaped trajectories<br />
[16], or combinations <strong>of</strong> those patterns are done. Also some insects may<br />
change the stroke trajectory for strong manoeuvers. And for increasing forward<br />
flight again other wing motions occur. Because this is a wide range, the most simple<br />
wing motion during hovering done by the drosophila fruit fly is investigated. For
Chapter 2. Review 8<br />
Figure 2.7: General pattern for the wing motion <strong>of</strong> Drosophila Melanogaster [16]<br />
further informations on the behaviour <strong>of</strong> other wing motions performed by other<br />
insects see for instance [16] [9].<br />
<strong>Wing</strong> motion<br />
In the most common form <strong>of</strong> hovering in insects the wings move along an approximately<br />
horizontal stroke plane with approximately equal and relatively high angles<br />
<strong>of</strong> attack during the downstroke and upstroke. This is done by fast rotating the<br />
wing at the end <strong>of</strong> each half stroke. The general pattern can be seen in figure 2.7.<br />
The whole stroke cycle can be described by a sinusoidal motion or a triangular motion<br />
depending on the insect. For the Drosophila Melanogaster the stroke trajectory<br />
is more a triangular motion with an amplitude <strong>of</strong> 130-160 degrees and a flapping<br />
frequency <strong>of</strong> 250 Hz. The stroke plane angle with respect to the horizontal is about<br />
10 degrees, while the body angle is tilted about 60 degrees. These values measured<br />
by [9] are presented in figure 2.8. Another important aspect is the ratio <strong>of</strong> the<br />
duration <strong>of</strong> the downstroke compared to the upstroke, which is approximately 0.8<br />
and shows that usually the downstroke is performed faster than the upstroke.<br />
Figure 2.8: Kinematics <strong>of</strong> Drosophila Melanogaster [9]<br />
(A) <strong>Wing</strong> tip trajectory in degrees, (B) <strong>Wing</strong> tip path drawn with respect to the body, which is<br />
represented by an arrow
9 2.2. <strong>Flapping</strong> wings in nature<br />
Aerodynamics<br />
Insects are able to hover by using a range <strong>of</strong> possible unsteady high-lift mechanisms,<br />
including rotational circulation, clap-and-fling and wake capture (see section 2.1).<br />
However, arguably the most important mechanism is the leading-edge vortex, which<br />
may generate up to 66% <strong>of</strong> the total lift in insect flight [23]. Consequently the high<br />
angle <strong>of</strong> attack to create the LEV is crucial for generating enough lift force.<br />
The almost symmetric stroke pattern, meaning that upstroke and downstroke are<br />
very similar as described above, 50% <strong>of</strong> the resulting lift force comes out <strong>of</strong> the<br />
downstroke, respectively out <strong>of</strong> the upstroke. Also the wing material is flexible, such<br />
that a camber occurs, which additionally gives lift force. Due to no morphological<br />
constraints this camber is inverted during the upstroke, which allows to maintain<br />
almost the same aerodynamic forces acting on the wing as during the downstroke.<br />
In figure 2.9 exemplary the generated forces are shown, which are taken out <strong>of</strong><br />
measurements made with a flapping device having the similar stroke trajectory as<br />
the Drosophila melanogaster [16].<br />
Figure 2.9: Force production in two cycles [16]<br />
(A) Vertical force acting on the wing (black line), (B) Translational angular wing motion (black),<br />
the wing’s angle <strong>of</strong> attack (blue) and heaving motion (green)<br />
It can be seen that the lift force is generated during up and downstroke. Also the<br />
clap and fling plays a role at the transition <strong>of</strong> the down- and upstroke and generates<br />
extra lift force. It is important to notice that the generated lift force highly depends<br />
on the stroke trajectory [16]. One can assume that if a wing is moved with the<br />
same angle <strong>of</strong> attack and rotational velocity, the same lift force should occur. But<br />
different stroke trajectories change the airflow pattern, the created vortices and so<br />
the generated lift force. Therefore insects have in general different stroke pattern,<br />
which are more or less effective, but at least enough to let them fly.
Chapter 2. Review 10<br />
2.2.2 Hummingbirds<br />
Most studies <strong>of</strong> hummingbirds are based on the rufous hummingbirds, because <strong>of</strong><br />
their practical properties for experimental measurements in the wind tunnel. They<br />
can be trained and thrive well in captivity. Although they have a body mass <strong>of</strong><br />
3-4g and a wing span <strong>of</strong> 110mm and so would be too small and lightweight for a<br />
prototype MAV, their wing motion still can be mimicked because the biggest existing<br />
hummingbird, the Giant Hummingbird (Patagonia Gigas) has according to<br />
biologists in general patterns the same kinematics, weights about 20g and has a<br />
wingspan <strong>of</strong> 280mm.<br />
Figure 2.10: <strong>Wing</strong> motion relative to the body flying at velocities <strong>of</strong> 0 − 12ms −1 [2]<br />
(A) Dorsal view with bird silhouette at mid-downstroke. (B) Lateral view with bird silhouette at<br />
start <strong>of</strong> downstroke.<br />
<strong>Wing</strong> Motion<br />
The rufous hummingbird flaps their wings with a frequency <strong>of</strong> 40-45 Hz. For bigger<br />
species the flapping frequency decreases. For instance the giant hummingbird has a<br />
flapping frequency <strong>of</strong> about 10-15 Hz. The main characteristics <strong>of</strong> the wing motion<br />
for several different forward flight speeds (0m/s−12m/s) can be seen in figure 2.10.<br />
Black circles indicate position <strong>of</strong> wingtips, white circles indicate position <strong>of</strong> wrists<br />
which is approximately in the middle <strong>of</strong> the wing.
11 2.2. <strong>Flapping</strong> wings in nature<br />
During upstroke <strong>of</strong> slow flight (0m/s and 2m/s), the tips and wrists trace in reverse<br />
nearly the same paths that were exhibited during downstroke. The lateral view reveals<br />
the wingtip describing an upwardly concave path, where the tips also follow<br />
a slight horizontal figure-8 pattern. In figure 2.12 the flapping motion is shown<br />
more detailed. The wrist elevation indicates the position <strong>of</strong> the wrist relative to the<br />
mid-frontal plane, which is described by the bird’s torso, and the chord angle describes<br />
the pitching <strong>of</strong> the wing with respect to this body plane. It can be seen that<br />
the flapping motion is sinusoidal, where the downstroke is performed insignificantly<br />
faster than the upstroke. Also the chord angle follows a sinusoidal trajectory, with<br />
a phase shift and an <strong>of</strong>fset compared to the wrist elevation.<br />
Figure 2.11: Angles describing bird-centered wing and body kinematics in rufous<br />
hummingbirds [2]<br />
β is the body angle w.r.t. horizontal, γh and γb is the stroke plane angle relative to horizontal<br />
respectively to body angle<br />
During upstroke almost no wing folding is present. According to [2], [17] the<br />
wingspan ratio upstroke:downstroke is about 0.98 for slow flight and decreases to<br />
0.90 for faster flying speeds up to 12m/s, where most <strong>of</strong> the flexing is done at the<br />
outer parts <strong>of</strong> the wing, between the wrist and the tip. As for slow speeds this<br />
ratio stays more or less constant, the wings can be taken as kinematically ’rigid’<br />
compared to other avian species.<br />
As can be seen in figure 2.11 for transition from hovering to a forward flight speed<br />
<strong>of</strong> 2m/s the stroke plane angle with respect to the body γb can be assumed to be<br />
constant. In general mainly the body angle β is tilted to achieve a forward velocity<br />
for slow flight speeds. For higher speeds <strong>of</strong> course more parameters are varying<br />
significantly. For instance it can be seen in figure 2.12 that the maximal chord angle<br />
reduces significantly for increasing forward flight speed and generally the stroke<br />
amplitude increases.<br />
Aerodynamics<br />
Although the aerodynamic characteristics <strong>of</strong> the hummingbirds wingbeat are very<br />
complex, several studies reveal some useful information. The main flow pattern<br />
can be described as shown in figure 2.13. During the flapping motion trailing-tip<br />
vortices are created. These vortices induce starting and stopping vortices <strong>of</strong> the<br />
downstroke. The resultant air circulation origined <strong>of</strong> these vortices are the main<br />
effects, besides the usual aerodynamic phenomena <strong>of</strong> flapping wings (Section 2.1),<br />
which are adequate to support the weight <strong>of</strong> the hummingbirds. A more detailed<br />
illustration can be seen in figure 2.14.
Chapter 2. Review 12<br />
Figure 2.12: Variation <strong>of</strong> chord angle relative to body-plane during wingbeats at<br />
velocities <strong>of</strong> 0 − 12ms −1 [2]<br />
<strong>Wing</strong>beat duration is expressed as a precentage <strong>of</strong> entire wingbeat. Broken line indicates wrist<br />
elevation relative to body-plane. Shaded area represents downstroke. Values are means ±s.d<br />
In the frontal view, the tip vortices <strong>of</strong> the downstroke (D) and the upstroke (U)<br />
are indicated. In the side view, between the stopping vortex <strong>of</strong> the downstroke (D)<br />
and the starting vortex <strong>of</strong> the upstroke (U) is a pocket <strong>of</strong> vorticity LEVD created<br />
at the leading edge <strong>of</strong> the wing during the rapid wing pronation at the beginning<br />
<strong>of</strong> the preceding downstroke, and carried through the downstroke to be shed during<br />
the supination at the beginning <strong>of</strong> the upstroke. The resultant airflow downwards<br />
gives the needed lift force for hovering.<br />
More studies on the airflow revealed that a force asymmetry between upstroke and<br />
downstroke is present. Hummingbirds produce 75% <strong>of</strong> their weight support during
13 2.2. <strong>Flapping</strong> wings in nature<br />
Figure 2.13: Wake structures in frontal and side plane [17]<br />
the downstroke and only 25% during the upstroke [17], although the kinematics <strong>of</strong><br />
the wing motion is symmetric, as for insects. It is assumed that this asymmetry<br />
is present due to slight difference <strong>of</strong> the angular velocity during downstroke and<br />
upstroke, a missing leading edge vortex during upstroke and several musculoskeletal<br />
and planform material properties, which do not allow the hummingbird’s wing to<br />
behave equally efficient as the insect’s wing. For instance during the downstroke<br />
the wing is slightly cambered, while during the upstroke the wing is not capable to<br />
invert the camber, which gives a significant loss <strong>of</strong> the produced lift force.<br />
Figure 2.14: Flow field vorticity at end <strong>of</strong> upstroke, (a) frontal view at shoulderplane,<br />
(b) side view at midwing-plane [17]<br />
2.2.3 Bats<br />
There are many bats species living on earth, which differ in size, weight and some<br />
other anatomical aspects [15]. But as the wing motion was observed to be similar<br />
for most <strong>of</strong> the species [18], mainly the studies about the lesser short-nosed fruit<br />
bat Cynopterus Brachyotis are considered, which give a sufficient insight to the<br />
aerodynamics and kinematics aspects <strong>of</strong> the bat flight.<br />
<strong>Wing</strong> motion<br />
As can be seen in figure 2.15 the bat wings possess more than two dozen joints, which<br />
can be controlled independently [5] and has bones that deform adaptively during<br />
the motions <strong>of</strong> the wingbeat cycle. Of course this anatomical structure is crucial for<br />
the motion <strong>of</strong> the wing and so very complex trajectories are fullfilled. As can be seen<br />
in figure 2.16 the general motion is characterized by a cambered wing during the<br />
downstroke, and a folding <strong>of</strong> the wing during the upstroke. To simplify the upstroke<br />
it could be described as additional delays for joints approaching the thorax with
Chapter 2. Review 14<br />
Figure 2.15: Anatomical structure <strong>of</strong> the bat wing [5]<br />
Figure 2.16: Sequences <strong>of</strong> images from below and in front <strong>of</strong> bat during on cycle<br />
starting at beginning <strong>of</strong> the downstroke [6]<br />
respect to the wing tip. So the motion <strong>of</strong> the next inner joint, the finger joint,<br />
compared to the wingtip is delayed, while the wrist then again is delayed compared<br />
to the finger joint and so on [5]. During downstroke the wing is approximately<br />
stretched, with a almost synchronous movement <strong>of</strong> all joints but also with increasing<br />
delays for the inner wing parts as can be seen on the right diagram <strong>of</strong> figure 2.17. The<br />
shoulder is the most proximal point <strong>of</strong> the wing. The wrist is the next distal joint,<br />
followed by the MCP III and the tip <strong>of</strong> the third digit as the furthest measurement<br />
point <strong>of</strong> the wing. Hence the kinematics are not simple. Even if only the wing<br />
Figure 2.17: Example trajectories <strong>of</strong> the different wing regions for 3m/s (left) and<br />
9m/s (right) [5]<br />
Zero represents the vertical position <strong>of</strong> the animal’s center <strong>of</strong> mass. Radius in red (lower arm),<br />
Humerus in dark blue (upper arm), MCP in light blue (knuckle), shoulder in black<br />
tip position is observed, it can be seen in figure 2.18 that the trajectory can not<br />
be realised by a simple mechanical mechanism. Also for increasing flight speed for<br />
example the wingtip elevation increases significantly, and the shoulder follows an<br />
entirely other trajectory compared to slow flight or hovering.<br />
According to [5] also changes in the length <strong>of</strong> the different bones and the membrane<br />
in the wing occur, which is again a reason for the above presented complex wing<br />
motion.
15 2.2. <strong>Flapping</strong> wings in nature<br />
Figure 2.18: Example <strong>of</strong> wing tip motion [6]<br />
Circles indicate the wing tip position for one whole cycle; The cross indicates the center <strong>of</strong> mass<br />
<strong>of</strong> the bat’s thorax.<br />
Aerodynamics<br />
Lift mechanisms in bat flight origined <strong>of</strong> unsteady effects are not studied very detailed<br />
yet. Regardless some measurements <strong>of</strong> the airflow using digital particle image<br />
velocimetry were documented. According to [10] the wing camber during downstroke<br />
is about 18% <strong>of</strong> the wing chord and the average angle <strong>of</strong> attack, where the<br />
wing is operating is about 50 ◦ . It is important to notice that if a fixed wing operates<br />
at such values, it would stall and lose lift, which already presumes that the bat<br />
flight is very complex and not very simply comparable with other flying animals.<br />
The main contribution to the lift force was found to be given by the LEV [10], which<br />
is shown in the following more detailed. Figure 2.19 show that the flow separates<br />
Figure 2.19: Velocity and vorticity fields around a bat wing in slow forward flight<br />
(1 m/s) at the time instance when the wing is in horizontal position during the<br />
downstroke [10]<br />
at the leading edge, generating an area <strong>of</strong> high negative vorticity. Behind this area<br />
the airflow reattaches, which results in an attached and laminar flow at the trailing
Chapter 2. Review 16<br />
edge. The vorticity is stronger near the wingtip (C) and deacreases toward the wing<br />
root (A).<br />
At the trailing edge, mainly distally on the wing, an area with negative vorticity is<br />
found, which results <strong>of</strong> a strong rotational movement before the end <strong>of</strong> the downstroke,<br />
which also enhances lift generation (see section 2.1.4). During the upstroke<br />
the vortex, which generates much <strong>of</strong> the lift in flapping-wing flight, is not documented<br />
well. It does not appear to origin in the wingtips as it is the case for the<br />
downstroke. According to biologists the starting point for the vortex seems to be<br />
somewhere in the middle <strong>of</strong> the wing, which again shows, that the complex wing<br />
structure, with the many joints is crucial for the whole bat flight.<br />
2.2.4 Birds<br />
For this section mainly the smaller birds are considered. Bigger birds are using more<br />
aerodynamic effects as for fixed wing flight, for instance gliding. Small birds need<br />
to generate the lift force by flapping the wings. However there are many different<br />
types <strong>of</strong> birds, which also have different kinematics.<br />
In general the wing can be tentatively separated into two parts, the outer wing and<br />
the inner wing. The inner wing acts like an aircraft wing, it is the lift developing<br />
part <strong>of</strong> the wing. When a bird flaps its wing it is the inner wing that moves the<br />
smallest distance, thus the lift it generates is due, to a large extent, on the airstream<br />
produced by forward momentum. The inner wing is also the most cambered part<br />
<strong>of</strong> the wing and this is made possible by the extensive bones and connective tissue<br />
that can hold this shape better than feathers. This means that it can generate more<br />
lift per surface area than the outer wing, it also means that it will stall more easily.<br />
The outer wing is the powerplant <strong>of</strong> the wing, it produces lift, but more crucially<br />
Figure 2.20: <strong>Wing</strong>span ratio as a function <strong>of</strong> flight velocity compared among bird<br />
species [2]<br />
it produces forward momentum. It is less cambered than the inner wing and more<br />
flexible and it is this flexibility that leads to the momentum. As the wing is flapped<br />
downward the outer wing tends to twist slightly forwards, this is due to a number<br />
<strong>of</strong> reasons, one being that air passing under the wing tends to well up toward the
17 2.3. Summary<br />
tip and as it does so it forces its way out under the back <strong>of</strong> the wingtip, tilting the<br />
wing forward.<br />
During the upstroke the feeders at the outer wing are spread to reduce the drag.<br />
Also the wing is folded for most <strong>of</strong> the species significantly (see for instance figure<br />
2.20).<br />
Unfortunately, there is not much literature dealing explicitly with the aerodynamics<br />
<strong>of</strong> small birds. Also note, that compared to hummingbirds no so detailed informations<br />
about the kinematics could be found for flight during hovering, because <strong>of</strong><br />
their less practical properties for experimental tests. Nonetheless briefly the flapping<br />
parameters are given exemplarily for the zebra finch, which belongs to the<br />
same family as the siskins and is a good representation for most <strong>of</strong> the small birds.<br />
Kinematics <strong>of</strong> flapping flight in the zebra finch<br />
Zebra finches have a body mass <strong>of</strong> about 13g with a wingspan <strong>of</strong> 170mm. They<br />
flap their wings with about 24Hz and a stroke amplitude <strong>of</strong> 135 ◦ , which decreases<br />
significantly for increasing the flight velocity [4]. As for hummingbirds the body<br />
angle is tilted for increased forward flight speed. For hovering the body angle with<br />
respect to the horizontal is about 50 ◦ , which decreases down to 15 ◦ for a flight<br />
velocity <strong>of</strong> 12m/s. The angle <strong>of</strong> incidence for the wing is for hovering about 75 ◦<br />
and decreases for a flight velocity <strong>of</strong> 12m/s to 15 ◦ . However the chord angle stays<br />
approximately constant for all flying velocities at about 20 ◦ .<br />
Another important aspect, is that the finch not regularly flaps it’s wings. Depending<br />
on the flight velocity the wing is bounded after several stroke cycles for some time<br />
instances. For higher velocities almost 50% <strong>of</strong> the time, the small birds hold their<br />
wings close to the body, do not flap them and can save so some energy. This<br />
behaviour can be seen in figure 2.21, where the wingtip elevation and the wingspan<br />
are shown for a flight speed <strong>of</strong> 2m/s (A) and 12m/s (B). As no lift is generated<br />
Figure 2.21: Representative wing kinematics in a zebra finch engaged in flapbounding<br />
flight at 2m/s (A) and 12m/s (B) [4]<br />
with flapping or gliding during the bounded time span, the aerodynamic properties<br />
<strong>of</strong> the body come to be crucial.<br />
2.3 Summary<br />
In the following table the characterization <strong>of</strong> the kinematics <strong>of</strong> the different investigated<br />
flying animals (Insects-Drosophila fruit fly, rufous Hummingbirds, Shortnosed<br />
Bats Cynopterus brachyotis) are summarized for hovering flight. Note that<br />
morphological data and results out <strong>of</strong> biological experiments are taken either as average<br />
values or most suited values. Specially for insects like the Drosophila fruit fly,
Chapter 2. Review 18<br />
the accuracy <strong>of</strong> measurements is limited, because <strong>of</strong> their small size, and deduced<br />
informations <strong>of</strong> experiments done with accurate models which represents good results<br />
for the insect flights are presented.<br />
Insects Hummingbirds Bats Siskin<br />
Weight [g]
19 2.3. Summary<br />
Siskin/Finch<br />
Advantages -very maneuverable<br />
-hovering and forward flight possible<br />
Drawbacks -wing folding is significant during upstroke<br />
-no constant flapping frequency for increasing forward flight<br />
speed<br />
-stroke amplitude reduces significantly for increasing forward<br />
flight<br />
Small birds also have an acceptable hover ability. But compared to hummingbirds<br />
it is decreased. According to biologists, the hummingbird’s should can do more<br />
different motions, for which reason crucial changes in the kinematics <strong>of</strong> the flapping<br />
occur. Also the wrist, the joint at the approximate midpoint <strong>of</strong> the wing, is more<br />
essential. Specially during upstroke the wing is folded significantly, which would<br />
be very difficult to implement in a MAV. Also for transition from hovering to forward<br />
flight many different flapping parameters are changing significantly, whereas<br />
no resonable simplification for a flapping device can be estimated. Hence, the small<br />
birds, are not taken into account for further investigations.<br />
Bat<br />
Advantages -very maneuverable<br />
-hovering and forward flight possible<br />
-low flapping frequency compared to animal’s size<br />
-can generate greater lift for less energy due to stretchy membrane<br />
Drawbacks -very complex wing structure, more than two dozen independently<br />
controlled joints<br />
-highly articulated motion and complex kinematics<br />
-deforming bones<br />
The study <strong>of</strong> the bat flight also exclude the bat wing motion as a main input for<br />
developing a MAV. A simple mechanical flapping mechanism could not be realised,<br />
because the wing motion is far too complex, with more than a dozen independently<br />
controllled joints, which would let the MAV be too heavy. Also no simplifications<br />
could be found, which would allow to make a simplified kinematic model and still<br />
follows the wing’s trajectory in a similar way as the natural bat.<br />
However some ideas could be filtered out <strong>of</strong> the bat-flight as for example, to let the<br />
outer wing parts follow a delayed trajectory with respect to the inner wing parts,<br />
which roughly describes the bat-flight. Also attaching the wing to the tail could be<br />
a reasonable idea.
Chapter 2. Review 20<br />
Hummingbird<br />
Advantages -very maneuverable<br />
-hovering and forward flight possible<br />
-almost no wing folding during upstroke<br />
-at first sight a simplified mimic wing motion is achievable with<br />
a mechanical mechanism<br />
-flapping frequency stays constant for every flight speed<br />
Drawbacks -twisting phenomena along the wing axis is present like in other<br />
birds<br />
-kinematic parameters variation more complex for increasing<br />
forward flight<br />
-pitching is done actively<br />
As can be seen the hummingbird seems to be a reasonable choice for mimicking.<br />
Specially for transition from hovering to slow forward flight, very few kinematic<br />
parameters are changing, which simplifies the later control challenges. For more<br />
increasing the forward flight speed <strong>of</strong> course more parameters are varied, but for<br />
the first approach this can be neglected. Compared to small birds almost no wing<br />
folding is present, hence the wings can be assumed to designed without a joint, as<br />
it is the case for insects. Although the pitching <strong>of</strong> the wing is done actively by the<br />
hummingbird, this can be still achieved to copy. As shown above, the pitch angle<br />
also follows a more or less harmonic pattern. The twisting phenomena along the<br />
wing axis, also does not represent a big obstacle, as this can be solved by using<br />
flexible wings, which adapts itself to the aerodynamic loads.<br />
Therefor, to generate first concepts for the flapping wing mechanism, mainly the<br />
hummingbird motion is considered, which could be extended with ideas described<br />
for the bat-flight or simplified by some kinematic aspects <strong>of</strong> the insect.
Chapter 3<br />
Concepts<br />
3.1 General Considerations<br />
3.1.1 Objective characteristics<br />
As described above, hummingbirds are chosen to mimic. Therefor the dimensions<br />
<strong>of</strong> the Giant Hummingbird (Patagonia gigas) are taken as a starting point for the<br />
design. According to biologists the kinematics <strong>of</strong> the Giant Hummingbird are similar<br />
to the above described pattern <strong>of</strong> the rufous hummingbird and so can be also<br />
considered as the motion which the flapping mechanism has to fulfill.<br />
Dimensions<br />
The following table summarizes the dimensions <strong>of</strong> the Giant Hummingbird which<br />
are used.<br />
Weight 25g<br />
<strong>Wing</strong>span 280mm<br />
Aspect Ratio 6.73<br />
<strong>Wing</strong>chord ≈ 40mm<br />
Body width ≈ 50mm<br />
<strong>Wing</strong> length ≈ 115mm<br />
<strong>Flapping</strong> motion<br />
The general characteristics <strong>of</strong> the flapping motion are presented in the table below.<br />
<strong>Flapping</strong> frequency 15 Hz<br />
Stroke Amplitude ≈ 110 ◦<br />
Body angle during hovering 50 ◦<br />
Stroke plane angle during hovering 60 ◦<br />
flapping pattern sinusoidal<br />
chord angle trajectory sinusoidal<br />
max/min chord angle 100 ◦ / -35 ◦<br />
21
Chapter 3. Concepts 22<br />
3.1.2 Flight control<br />
<strong>Flapping</strong> flight is rather complex when control aspects are considered. For birds and<br />
insects several parameters <strong>of</strong> the flapping motion are changed to perform different<br />
maneuvers. For some control tasks several different ways can lead to the desired<br />
result. For instance for changing the forward flight velocity the pitch angle <strong>of</strong> the<br />
whole flying animal is changed. Therefor either the mean flapping angle is changed,<br />
the angle <strong>of</strong> attack is altered and/or the stroke amplitude is varied. The rolling<br />
angle can be controlled by increasing the flapping amplitude and/or the angle <strong>of</strong><br />
attack <strong>of</strong> the outer wing. For more complicated maneuvers many <strong>of</strong> the flapping<br />
parameters are changed simultaneously. Of course a flapping mechanism, which can<br />
be controlled in such a way would be much too complex and therefor too heavy for<br />
a MAV. Of course a more deep study is needed for a good flight control, but this<br />
can only be done, when the flapping mechanism is finished and implemented in a<br />
MAV. But as a first approach it is adequate to consider only the simplest control<br />
aspects.<br />
According to biologists, studying the hummingbird’s wing motion, a simple way to<br />
change the flight velocity is to tilt the body angle. As a first approach this can<br />
be done by shifting the center <strong>of</strong> gravity <strong>of</strong> the MAV forward or backward and/or<br />
using servos at the tail <strong>of</strong> the MAV. Changing other parameters <strong>of</strong> the flapping<br />
motion and taking this into account for developing a flapping mechanism would be<br />
to complicated at this early stage <strong>of</strong> the project.<br />
To change the flight direction also a simple solution is needed. In general birds<br />
change several parameters, for instance the stroke amplitude and the angle <strong>of</strong> attack,<br />
<strong>of</strong> each wing seperately. This again would be to complex, for which reason it is<br />
considered to change the orientation <strong>of</strong> the tail to deviate the air flow as a first<br />
assumption. Of course this has also to be investigated more deeply, when a flapping<br />
prototype is present.<br />
Therefor the development <strong>of</strong> a first flapping mechanism can be done independently<br />
<strong>of</strong> these control aspects. More precisely the flapping device needs only one actuator,<br />
which has to generate the correct motion to produce enough lift force. The control<br />
issues can be solved by using servos which change the orientation <strong>of</strong> the tail.<br />
3.1.3 Actuator<br />
To have a reasonable design for a MAV as less actuators as possible should be used<br />
to reduce the power consumption and the mass. Also in general the mechanical<br />
complexity then reduces, less joints and links are needed to transfer the forces <strong>of</strong><br />
the actuators to the wings and so is more lightweight.<br />
A brief investigation <strong>of</strong> the available actuators showed, that no reasonable linear<br />
actuator can be used. Either they are too big and too heavy or can not bring<br />
up the force needed for the flapping motion or the linear displacement needed for<br />
the stroke amplitude. As the future MAV is considered to be <strong>of</strong> a size similar to<br />
the Giant Hummingbird piezoactuators can also be excluded due to the too small<br />
generated forces. DC-Motors can fulfill these first constraints. Some, specially<br />
brushless DC-motors, could be found which have a reasonable torque, an acceptable<br />
power consumption and still a weight which is small enough to integrate in a MAV.<br />
Therefor the flapping mechanism will be designed using a rotary drive system.
23 3.2. Concepts for wing flapping<br />
3.2 Concepts for wing flapping<br />
3.2.1 Concept A<br />
To have a sinusodial flapping motion as it is present for the hummingbird (see<br />
figure 2.12), the main structure <strong>of</strong> the flapping mechanism can be approximated<br />
with a circular motion, which is generated with a rotational actuator and where the<br />
movement in the direction <strong>of</strong> one main axis is transmitted to the wings according<br />
to figure 3.1. However in such a way, the sinusodial motion <strong>of</strong> the wings only can be<br />
approximated. The resulting trajectory <strong>of</strong> the wing tip depends on the up and down<br />
Figure 3.1: Schematic drawing <strong>of</strong> concept A1<br />
movement <strong>of</strong> the centered guided joint, which again depends on the parameters L<br />
and r (see figure 3.2). Only for L going to infinity a perfect sinusodial motion with<br />
amplitude r can be achieved. For a good approximation therefor L has to be chosen<br />
much larger than r. The kinematic relationship is given with equations 3.1 and 3.2<br />
and is shown in figure 3.3 for various ratios L/r 1 .<br />
sin α =<br />
r · cos δ<br />
L<br />
(3.1)<br />
y = r · sin δ + L · cos α (3.2)<br />
Already a ratio higher than 2:1 for L:r can be considered as an approximation<br />
which is good enough to achieve an acceptable sinusodial motion. This can be either<br />
done by increasing L or decreasing r. It is important to point out, that for decreasing<br />
r, which affects the amplitude <strong>of</strong> the sinusodial movement <strong>of</strong> the centered joint, also<br />
the distance b has to be adapted according to equation 3.3 to get the desired stroke<br />
amplitude <strong>of</strong> βmax = 55 ◦ .<br />
b =<br />
r<br />
tan (βmax)<br />
(3.3)<br />
To reduce this dependency <strong>of</strong> b to the amplitude r, an additional horizontal link<br />
can be inserted according to figure 3.4. Instead one joint, the whole link is moved<br />
up and down and is connected over two joints to the wings to transmit this motion.<br />
Therefor the length <strong>of</strong> this link can be adjusted and assures more liberty for the<br />
later dimensioning <strong>of</strong> the different link lengths. However an additionally joint is<br />
needed, which <strong>of</strong> course reduces the efficiency.<br />
1 Generated with matlab kinematic circular.m
Chapter 3. Concepts 24<br />
Figure 3.2: Sketch for kinematics <strong>of</strong> general structure for the flapping motion<br />
Figure 3.3: Trajectories <strong>of</strong> centered joint for one cycle for different ratios L/r<br />
3.2.2 Concept B<br />
This concept is based on the same general structure as concept A, as the given<br />
sinusodial flapping motion does not let much margin for big variations. Therefor the<br />
general kinematic pattern is the same as described above in section 3.2.1. Anyway<br />
the structure presented in figure 3.5 can also be a good solution. The actuator’s<br />
torque is transmitted via two gears to the associated wing. The advantage <strong>of</strong> this<br />
concept as a starting point for the further designing is, that each wing can be<br />
treated somehow independently <strong>of</strong> each other in terms <strong>of</strong> the flapping motion and<br />
leaves therefor more space for further ideas to control each wing independently.<br />
However the additional gears increase the friction and the complexity and so also<br />
the efficiency and the weight respectively.<br />
To increase the robustness <strong>of</strong> the design, the flapping can be actuated according<br />
to the right side <strong>of</strong> figure 3.5. Instead <strong>of</strong> just actuating the wings, a more solid
25 3.2. Concepts for wing flapping<br />
Figure 3.4: Schematic drawing <strong>of</strong> concept A2<br />
Figure 3.5: Schematic drawing <strong>of</strong> concept B1 (left) and B2 (right)<br />
tube, where the wings can be inserted in, is moved. This tube can be attached via<br />
a rotational joint to the main structure where also the motor is attached at and<br />
gives so more stability to the flapping device.<br />
3.2.3 Concept C<br />
To reduce the number <strong>of</strong> the needed joints the actuation can be done by using a<br />
flexible part according to figure 3.6. The bending <strong>of</strong> the rod at the middle induces<br />
a motion at the wings. For the flexible part a material can be used which has a<br />
good flexibility and still has a enough high stability as carbon or titanium.<br />
For a brief inspection <strong>of</strong> the feasibility <strong>of</strong> this concept the theory <strong>of</strong> mechanics for<br />
calculating the bending line <strong>of</strong> a rod is used. The bending line can be calculated<br />
according to equation 3.4,<br />
d 2 w(x)<br />
dt 2<br />
= −My(x)<br />
EIy<br />
(3.4)<br />
whereas E is the modulus <strong>of</strong> elasticity <strong>of</strong> the used flexible material. The bending<br />
torque in the y-direction My and the moment <strong>of</strong> inertia in the y-direction <strong>of</strong> the<br />
rod Iy is calculated as follows<br />
<br />
My(x) =<br />
Iy = dh3<br />
12<br />
F x<br />
2<br />
F x<br />
2<br />
for 0 < x < b<br />
− F · (x − b) for b < x < 2b<br />
(3.5)<br />
(3.6)
Chapter 3. Concepts 26<br />
Figure 3.6: Schematic drawing <strong>of</strong> concept C<br />
The rod’s dimensions are specified by it’s width d and height h as shown in figure 3.7.<br />
Using the boundary conditions 3.7 and integrating equation 3.4 gives the maximal<br />
deflection at the midpoint between the two wing holdings needed to get the desired<br />
stroke amplitude <strong>of</strong> β=55 ◦ (equation 3.8 2 ).<br />
dw(0)<br />
dt = tan 55◦ , w(0) = 0 , dw(b)<br />
dt = 0 (3.7)<br />
F =<br />
w(b) =<br />
4EIy tan 55◦<br />
b2 −F b3<br />
12EIy<br />
+ b tan 55◦<br />
<br />
2b tan 55◦<br />
=⇒ w(b) =<br />
3<br />
Figure 3.7: Calculation <strong>of</strong> the bending line<br />
(3.8)<br />
Because the deflection <strong>of</strong> the rod needs a certain force to attain the desired<br />
stroke amplitude, it has to be checked if an actuator can be found, which generates<br />
enough force. Therefor the whole mechanism is modelled in a simplified way as<br />
presented in figure 3.8. It is important to notice that also the following calculations<br />
are just a rough approximation to check for the fundamental feasibility <strong>of</strong> this<br />
concept and if it has to be investigated more deeply. Also the forces acting on the<br />
wings and the wings itself are not included yet, as these forces can not be calculated<br />
exact enough and so just would blur the results.<br />
The behaviour <strong>of</strong> the bending rod can be modelled in a simple way as a spring with<br />
a point mass ms, which represents the mass <strong>of</strong> the link with length L. The spring<br />
constant c and the corresponding force Fc generated by the compressed or stretched<br />
2 matlab file bending line flex.m
27 3.2. Concepts for wing flapping<br />
spring for this arrangement is defined as<br />
c = 48EIy<br />
(2b) 3<br />
(3.9)<br />
Fc = c(y − y0) (3.10)<br />
whereas y0 is the length <strong>of</strong> the unloaded spring and is set as a first instance for<br />
δ = 0.<br />
Figure 3.8: Sketch for calculation <strong>of</strong> the dynamics<br />
Fs represents the force acting on the link and M the generated torque by the<br />
actuator. The maximal value for y, which is calculated in equation ?? is equal to<br />
the amplitude <strong>of</strong> the sinusodial motion. As L ≫ r the radius can be approximated<br />
as r ≈ w(b). Using the laws <strong>of</strong> conservation <strong>of</strong> the momentum for the link and the<br />
angular momentum for the rotating disc the following equations <strong>of</strong> motion can be<br />
derived:<br />
ms · d2 y<br />
dt 2 = Fs cos α − cy + cL cos α0 (3.11)<br />
θ · d2 δ<br />
dt 2 = M − rFs cos δ − α (3.12)<br />
for δ = 0 and θ is the inertia matrix <strong>of</strong> the rotating disc. Using<br />
equations 3.1 and assuming a constant angular speed ˙ δ the equations for ˙α, ¨α are<br />
where sin α0 = r<br />
L<br />
˙α = − ˙ δ · sin δ · Z −0.5 · r<br />
L<br />
¨α = − ˙ δ 2 · cos δ · Z −0.5 · r<br />
L − ˙ δ · sin δ · r<br />
L · −r2 ˙ δ sin 2δZ −1.5<br />
2L2 (3.13)<br />
(3.14)
Chapter 3. Concepts 28<br />
with Z = 1−r2 cos δ 2<br />
L2 .<br />
Derivating equation 3.2 with respect to time an expression for ¨y is obtained<br />
¨y = −r ˙ δ 2 − L¨α · sin α − L ˙α 2 · cos α (3.15)<br />
Using equations 3.15, 3.13 and 3.14 into equation 3.11 the force on the link can<br />
be calculated during one cycle (equation 3.16). Inserting it into equation 3.12 the<br />
needed torque for the bending is obtained.<br />
Fs = ms¨y − cy − cL cos α0<br />
cos α<br />
(3.16)<br />
For numerical values a carbon rod with dimensions <strong>of</strong> 0.1mm x 2mm and a<br />
modulus <strong>of</strong> elasticity <strong>of</strong> 110 ′ 000 N<br />
mm2 is used. The parameter b is chosen according<br />
to the estimated value <strong>of</strong> the body width <strong>of</strong> the hummingbird, which corresponds<br />
to the distance between the two wing mountings as mentioned in chapter 3.1. The<br />
results are presented in figure 3.9, which show the torque M needed during one cycle3 with the maximal value <strong>of</strong> slightly under 4mNm. The positive torque indicates that<br />
the actuator has to push the link, while negative torques represents the situations<br />
when the actuator has the break the motion <strong>of</strong> the link due to the reaction <strong>of</strong> the<br />
spring-like behaviour <strong>of</strong> the bended rod.<br />
Figure 3.9: Results <strong>of</strong> the force on the link and the needed torque during one<br />
flapping cycle<br />
It can be seen that with such dimensions for the carbon rod, an applicable<br />
actuator could be found, which is enough lightweight and still can bring up enough<br />
torque 4 . However if the thickness <strong>of</strong> the rod is increased to 0.2mm, already a much<br />
higher torque is needed and the size and weight <strong>of</strong> the actuator would grow too<br />
much. Another disadvantage is that the distance between both wing holdings can<br />
not be reduced much more, then again a higher force is needed to bend the flexible<br />
rod. Also the wings are not considered yet, which again increases the torque which<br />
has to be generated by the motor.<br />
Taking these aspects into account a working flapping device using this concept will<br />
not be guaranteed, for too heavy wings no real flapping motion could be produced,<br />
only the flexible part would bend withouth generating the desired motion for the<br />
wings.<br />
3 generated with dynamics flap rot const.m<br />
4 see for instance: www.faulhaber.com
29 3.3. Concepts for wing pitching<br />
3.2.4 Concept D<br />
All the above ideas induce a linear motion between the centered joint and the wing<br />
holding, because <strong>of</strong> the relatively high stroke amplitude. To get rid <strong>of</strong>f the linear<br />
motion a structure as shown in figure 3.10 could be used. The wing is attached<br />
similar as in concept B2 to a connector, which is attached to the main structure<br />
and can rotate about one axis, allowing to flap the wing in one plane. Between the<br />
connector and the actuation point three joints are arranged so that the link in the<br />
middle does not just move up and down, but rather adopts its orientation that the<br />
joint most proximal to the wing is routed on a circular trajectory and therefor does<br />
not induce a linear motion into the direction <strong>of</strong> the connector. The kinematics are<br />
Figure 3.10: Schematic drawing <strong>of</strong> concept D<br />
similar to those described in section 3.2.1. The only difference is that the parameters<br />
have changed places. Here y is determined, it is actuated in a sinusodial way, and<br />
the angle δ, which above described the state <strong>of</strong> the cycle is now the flapping angle<br />
(see figure 3.10). Note that δ with the additionally inserted joint not makes a<br />
whole cycle. By adapting the correct link lengths and the actuating amplitude,<br />
the maximum opening angle <strong>of</strong> 55 ◦ can be obtained. The general equations for the<br />
kinematics can therefor easily be taken out <strong>of</strong> equations 3.1 and 3.2. Hence also no<br />
exact sinusodial flapping motion is present, but using the same convention as above<br />
(L ≫ r) a good approximation can be found.<br />
However this would be a nice solution, this concept needs the most joints <strong>of</strong> the<br />
described concepts above. Also for implementing this concept later on for a real<br />
MAV could be difficult because the links and the joints have to be guided and<br />
supported to increase the stability <strong>of</strong> this arrangement.<br />
3.3 Concepts for wing pitching<br />
3.3.1 Active pitching<br />
As showed in chapter 2.2.2 the hummingbird controls the pitch angle (chord angle)<br />
<strong>of</strong> the wing approximately in a harmonic sinusodial motion for one flapping cycle.<br />
Therefor to mimic the wing motion an obvious solution would include also to control<br />
the pitch angle actively with the same actuator. As showed in chapter 3.2 an<br />
approximated sinusodial flapping trajectory could be produced. By optimizing the<br />
<strong>of</strong>fset between the sine wave <strong>of</strong> the flapping and the chord angle, setting up the<br />
desired pitch angle for every state <strong>of</strong> the whole cycle with the same rotary actuator<br />
should be possible. The remaining question, at which point to actuate the wing to<br />
set up the pitch angle has to be investigated.
Chapter 3. Concepts 30<br />
Actuating the wing’s trailing edge<br />
One idea could be to attach the trailing edge <strong>of</strong> the wing to the main body, where it<br />
is connected to the actuator and is moved according to the flapping cycle to achieve<br />
the desired pitch angle as showed in figure 3.11. As a first approximation roughly<br />
Figure 3.11: Actively adapting pitch angle using the trailing edge<br />
the values <strong>of</strong> the hummingbird’s flapping trajectory as can be seen in figure 2.12 are<br />
taken. Note that the studies base on the smaller rufous hummingbirds and not the<br />
giant hummingbird, for which reason the dimensions <strong>of</strong> the rufous hummingbirds<br />
[2] are taken to check the feasibility. The wrist elevation is taken as a cosine wave,<br />
Figure 3.12: Geometric sketch for calculations <strong>of</strong> the trailing edge motion<br />
while the trajectory <strong>of</strong> the chord angle has an <strong>of</strong>fset <strong>of</strong> about 190 degrees to it.<br />
According to the geometric drawing (figure 3.12) the following equation relates the<br />
position <strong>of</strong> the trailing edge <strong>of</strong> the wing to the position <strong>of</strong> the leading edge, which<br />
is described by the wrist elevation.<br />
yT = yL − c sin(α) (3.17)<br />
The resulting trajectories are shown in figure 3.13 5 . The left graph shows the<br />
actual motion <strong>of</strong> the leading edge, the trailing edge and the original chord angle.<br />
On the right side the cosine wave <strong>of</strong> the leading edge is shifted over the wave <strong>of</strong> the<br />
trailing edge to clarify the result. There it can be seen that the trailing edge is not<br />
moved totally harmonic. One half <strong>of</strong> the cycle is performed a little faster than the<br />
5 matlab file active pitch.m
31 3.3. Concepts for wing pitching<br />
Figure 3.13: Left: Trajectories <strong>of</strong> leading edge, traling edge and chord angle, Right:<br />
Shifted graph for the leading edge motion for comparison <strong>of</strong> the harmoinc behaviour<br />
<strong>of</strong> the trailing edge’s motion<br />
other. This anomaly increases for bigger wings and hence if the dimensions <strong>of</strong> the<br />
giant hummingbird are used the inaccuracy increases also. If this way <strong>of</strong> setting up<br />
the pitch angle is used, it has to be considered, that the wing has to be made <strong>of</strong> a<br />
stretchy material. If the actuation is not done absolutely exact, which is the case if<br />
only one actuator is used, the chord length will vary and induce stress on the wing.<br />
However a big advantage would be that the mechanism for flapping and pitching<br />
could be done in a seperate manner, if the motor lies between both edges <strong>of</strong> the<br />
wing.<br />
Actuating the wing’s leading edge<br />
As the chord angle describes a sinusodial trajectory as the flapping motion a more<br />
acurate way to control the pitch angle would be to actuate directly the leading edge<br />
rod <strong>of</strong> the wing as shown in figure 3.14. The pitch control can be done by just a<br />
Figure 3.14: Actively adapting pitch angle using the leading edge<br />
horizontal movement, with the same harmonic behaviour as the flapping motion,<br />
actuated directly on the wing rod <strong>of</strong> the leading edge at a distance t <strong>of</strong> the center
Chapter 3. Concepts 32<br />
<strong>of</strong> the rod. Of course the mechanical structure is not as easy as presented in figure<br />
3.14. As the amplitude for the chord angle is more than 100 degrees, the pin on the<br />
rod drifts away from the actuator tool. This needs a complex pitching mechanism<br />
to have the friction reduced. A simple but not so clean way to solve this, would<br />
be to add a spiral spring which pushes the pin constantly onto the actuator tool.<br />
However a more difficult problem would be, that the same rod is actuated for the<br />
flapping motion and also moves up and down. Hence this mechanism has to be as<br />
near as possible to the body <strong>of</strong> the MAV.<br />
Despite these design challenges, the advantage <strong>of</strong> this concept can be showed by<br />
calculating the kinematics. The needed amplitude s <strong>of</strong> the horizontal movement is<br />
expressed by equation 3.18.<br />
s = t · tan ɛ (3.18)<br />
By putting this amplitude into the same sinusodial motion as the flapping and<br />
adjusting the <strong>of</strong>fset, the simulated pitch angle can be obtained according to figure<br />
3.15 6 . It can be seen, that also here small errors occur. But as the sine wave for the<br />
chord angle only is an approximation and the real chord angle as showed in figure<br />
2.12 even more equals the simulated angle, this method seems to be more accurate<br />
than actuating the trailing edge.<br />
Figure 3.15: Simulated chord angle for horizontal actuation <strong>of</strong> wing rod<br />
3.3.2 Passive pitching<br />
A more simple way to adjust the pitch angle can be done by let the wing passively<br />
adapt it’s chord angle. This is possible as inertial and aerodynamic loads tend to<br />
decrease the angle <strong>of</strong> attack. However this would not be as accurate as controlling<br />
the angle actively. But as can be seen in [2] the angle <strong>of</strong> attack for the hummingbird<br />
flight stays more or less constant during one flapping cycle. Of course at the beginning<br />
<strong>of</strong> the upstroke and the downstroke the angle <strong>of</strong> attack will intuitively have<br />
the biggest error according to the desired value. But several other MAV already<br />
use this way for adjusting the pitch angle <strong>of</strong> the wing with success, for which reason<br />
6 matlab file active pitch2.m
33 3.3. Concepts for wing pitching<br />
this approach can be considered as suitable.<br />
Therefor two main ideas came up. The first one can be used if the wing rod is<br />
inserted into a tube, which is attached to the main structure and is actuated for<br />
flapping (see Concept B2 in chapter 3.2). The main connection between the wing<br />
rod and the tube is done with spiral springs as shown in the sketch in figure 3.16.<br />
If the flapping is performed, the wing tends to decrease the angle <strong>of</strong> attack and<br />
starts to rotate. As the spring induces a counter-torque to this rotation, a constant<br />
angle <strong>of</strong> attack could be obtained. Unfortunately there is no way for calculating a<br />
good enough approximation for the forces and torques acting on the wing. Hence<br />
the strength <strong>of</strong> the springs has to be identified experimentally with a test bench <strong>of</strong><br />
the flapping device and completely designed wings. Another approach is to include<br />
Figure 3.16: Sketch <strong>of</strong> general principle for passive pitching at the hinge<br />
the pitching mechanism already into the wings. The general idea is adopted <strong>of</strong><br />
Robert Wood’s Robotic Insect [24]. As shown in figure 3.17 the fibre <strong>of</strong> the wings<br />
could be designed using a sandwich-like structure. The middle part is made <strong>of</strong> a<br />
flexible material and is surrounded by a more stiff material. Right beneath the<br />
wing rod <strong>of</strong> the leading edge, which is actuated for flapping, the stiff material is<br />
removed, and lets the wing surface rotate around the leading edge. By investigation<br />
the maximal pitch angle can be adjusted by removing more or less <strong>of</strong> the stiff<br />
material. If the angle increases, a touching <strong>of</strong> the outher parts occur and blocks a<br />
further bending <strong>of</strong> the flexible material. Also the flexible material can be modelled<br />
Figure 3.17: Passive pitching done at the wings<br />
as a spring, wherefor like for the first approach, the correct adjustments have to be<br />
done experimentally. However this idea saves weight and reduces the complexity<br />
<strong>of</strong> the flapping mechanism. Another advantage is, that this approach for pitching<br />
the wing only depends on the wings and not on the mechanism which generates the<br />
flapping motion. In contrast the first approach, using springs, already presumes<br />
some construction elements for the attachement <strong>of</strong> the wing to the main body.
Chapter 3. Concepts 34
Chapter 4<br />
Evaluation<br />
4.1 Evaluation <strong>of</strong> concepts<br />
After generating different ideas for the flapping motion, these concepts will be evaluated<br />
according to several criteria described below, to chose the most suitable concept<br />
as a starting point for the CAD design. As not all exact dimensions and parameters<br />
for the above described concepts are present yet, this evaluation is done in a more<br />
qualitative way. Nonetheless this selection is important as it affects the whole future<br />
design process.<br />
4.1.1 Criteria<br />
The concepts are evaluated according to following critera:<br />
• Weight<br />
• Size<br />
• Robustness<br />
• Mechanical complexity<br />
• Expected power consumption<br />
• Accuracy<br />
Note that some criteria are overlapping and depend on each other. For instance a<br />
mechanism which is more complex and needs more joints, also in general consumes<br />
more power. The most important aspects for a MAV are the weight, as it has to<br />
be minimized or should left space for further weight reduction, and the power consumption,<br />
which also needs to be as low as possible. It would not make sense to<br />
integrate a flapping mechanism in a MAV, which consumes too much power and<br />
needs a bigger battery, which again increases the weight. However the expected<br />
power consumption can not yet be determined accurate enough, to get significant<br />
differences between the various concepts for the flapping motion, whereas mainly<br />
the number <strong>of</strong> joints and the generated friction is taken as an indicator for the<br />
performance in terms <strong>of</strong> power-saving.<br />
The general dimensions are already fixed at this stage (see chapter 3.1), for which<br />
reason the size more indicates the feasibility to minaturize the mechanism, but has<br />
less priority as the actual dimensions are considered to be small enough for a prototype<br />
MAV. Also the robustness plays an important role. The mechanism has to<br />
be stable enough to achieve a flapping frequency <strong>of</strong> 15Hz. Many links decrease the<br />
35
Chapter 4. Evaluation 36<br />
robustness too. To stabilize them, they need to be guided somehow on the main<br />
structure <strong>of</strong> the MAV, which would again increase the complexity and induce more<br />
friction. The accuracy is only used for evaluating the concepts <strong>of</strong> the pitch motion,<br />
which differ for each concept. Due to the fact that all concepts for the flapping<br />
motion base on the same general principle, all generate the similar wing beat trajectory<br />
as shown in chapter 3.2.1, for which reason this criterion is not used for the<br />
flapping concepts.<br />
Taking into account the above considerations an evaluation matrix can be generated<br />
with weights indicating the importance <strong>of</strong> each criterion:<br />
Criterion Weight<br />
Weight 6<br />
Size 1<br />
Robustness 4<br />
Mechanical complexity 5<br />
Expected power consumption 5<br />
Accuracy 3<br />
4.1.2 <strong>Flapping</strong> concepts<br />
Using the above matrix the concepts <strong>of</strong> chapter 3.2 are compared to each other and<br />
a rank is assigned (6 is the best and 1 is the worst), considering the facts described<br />
above and in chapter 3.2.<br />
Weight Size Robust. Mech.<br />
Complex.<br />
Concept A1 5 3 3 5 6<br />
Concept A2 4 2 4 4 5<br />
Concept B1 2 6 5 3 2<br />
Concept B2 1 6 6 2 2<br />
Concept C 6 1 2 6 3<br />
Concept D 3 4 1 1 4<br />
Power<br />
Consumpt.<br />
The outcome <strong>of</strong> this comparison is shown in the table below, where the total points<br />
and the rank (1 best, 6 worst) are presented.<br />
Total Points Rank<br />
Concept A1 100 1<br />
Concept A2 87 3<br />
Concept B1 63 4<br />
Concept B2 56 5<br />
Concept C 90 2<br />
Concept D 51 6<br />
As can be seen, concept A1 seems to be the most suitable to be used as a starting<br />
point and is therefor used as a guidance for the CAD design. Concept C also seems<br />
reasonable to be followed. Nonetheless it is neglected, due to the big uncertainty<br />
for the feasibility, how it was described in chapter 3.2.3.<br />
4.1.3 Pitching concepts<br />
This process is repeated for the concepts described in chapter 3.3 and again presented<br />
in tables below.
37 4.2. Expected weight<br />
Weight Size Robust.<br />
Active-Trailing Edge 2 2 2<br />
Active-Leading Edge 1 1 1<br />
Passive-Spring 3 3 3<br />
Passive-<strong>Wing</strong> 4 4 4<br />
Mech.<br />
Complex.<br />
Power<br />
Consumpt.<br />
Active-Trailing Edge 2 2 3<br />
Active-Leading Edge 1 1 4<br />
Passive-Spring 3 3 2<br />
Passive-<strong>Wing</strong> 4 4 2<br />
Total Points Rank<br />
Active-Trailing Edge 51 3<br />
Active-Leading Edge 33 4<br />
Passive-Spring 69 2<br />
Passive-<strong>Wing</strong> 90 1<br />
Accuracy<br />
For the pitching motion <strong>of</strong> the wing, the concepts for passive wing pitching are<br />
superior using this evaluation method. This is certainly the case, because the evaluation<br />
matrix is laid out in such a way, that the whole mechanism stays simple and<br />
is as lightweight as possible. If experimental data would be available, how more lift<br />
force with a more accurate pitching motion can be generated, the weight for the<br />
accuracy can be adapted. For instance, if the more complex and heavier mechanism<br />
for actively controlling the pitch motion <strong>of</strong> the wing, regains more lift force than<br />
the additional weight needed, controlling the wing’s pitch angle actively would be<br />
superior to the concepts for passively controlled wing pitch angles.<br />
However, for this first approach developing a flapping mechanism, passiv wing pitching<br />
is adequate.<br />
4.2 Expected weight<br />
Knowing on which concept to focus on, first speculations on the expected weight<br />
<strong>of</strong> the MAV can be made. Using the dimensions <strong>of</strong> chapter 3.1 the weights <strong>of</strong> the<br />
different parts can be estimated. Note that in the following only a rough approximation<br />
is done, which is based on an internet research <strong>of</strong> several suppliers <strong>of</strong> parts<br />
for model aircrafts 1 .<br />
The wings are assumed to have the structure out <strong>of</strong> carbon, which is covered with<br />
mylar as shown schematically in figure 4.1. Three carbon (1.55g/cm 3 ) rods with<br />
diameter <strong>of</strong> 2mm can be used as support to attach the 0.0005mm thick mylar sheet<br />
(7g/m 2 ) on it. With this design, one simple wing weights about 1.5g.<br />
As mentioned above two servos are needed for control purposes, whereas each one<br />
weights about 1g. Including the weight <strong>of</strong> the RC receiver (1g), the brushless DC<br />
motor (≈ 6g) and the battery (6.5g), the electronic payload measures about 15.5g.<br />
A reasonable approximation for the structure <strong>of</strong> the MAV, which includes the found<br />
concept for the flapping mechanism, would be about 10g.<br />
Therefor the expected weight <strong>of</strong> the MAV can be assumed to be ≈ 30g.<br />
1 for instance www.microbrushless.com
Chapter 4. Evaluation 38<br />
Figure 4.1: Structure <strong>of</strong> the wing<br />
4.3 Expected power consumption<br />
Using the expected weight <strong>of</strong> 30g, the needed mechanical power can be calculated.<br />
According to [1] the mechanical power can be expressed by following equation:<br />
<br />
W<br />
P = W<br />
(4.1)<br />
2ρSE<br />
where W = mg ≈ 0.29N is the total mass in expressed in [N], ρ = 1.29kg/m3 the<br />
air density and SE is the effective operational area or sweeping area <strong>of</strong> both wings.<br />
Usually the sweeping area can be considered to be about 70% <strong>of</strong> the circular disc S<br />
swept by both wings [1]. Rewriting equation 4.1 as follows<br />
<br />
W<br />
S<br />
P = W<br />
2ρ SE<br />
(4.2)<br />
S<br />
and inserting SE<br />
≈ 70%, W<br />
= 31.52 N<br />
we obtain for the power P = 0.393W .<br />
S S m<br />
According to [1] an efficiency coefficient for the hover ability has to be included. As<br />
the wing motion will be similar to the hummingbird’s wing motion, it is reasonable<br />
to take the same value for the coefficient ηH = 60%. Including the mechanical<br />
efficiency <strong>of</strong> the mechanism ηM<br />
according to equation 4.3.<br />
the total needed mechanical power is calculated<br />
Ptot = P<br />
ηHηM<br />
(4.3)<br />
The efficiency coefficient for the mechanism ηM can be calculated by summing up<br />
the efficiency <strong>of</strong> the joints (≈ 80% for each joint) and the efficiency <strong>of</strong> the motor,<br />
which is typically around 60% for the chosen brushless DC motor 2 . Considering the<br />
above chosen concept, the total needed mechanical power is about 1.36 W.<br />
With this estimated value, the range for finding an appropriate motor can be constrained.<br />
However, as the objective <strong>of</strong> this project is not to build the whole robot,<br />
this calculation just strengthens the evidence that such a motor can be found, which<br />
can fulfill the power and the weight requirements. Also the electrical power consumption<br />
can then be calculated, when the best matching motor could be found,<br />
which allows to estimate the time the MAV could fly, without recharging the batteries.<br />
2 see for instance www.wes-technik.de
Chapter 5<br />
CAD Design<br />
The ’winner’ concept <strong>of</strong> chapter 4.1 is now converted into a test bench, using 3D<br />
CAD s<strong>of</strong>tware. As the forces on the wings are still unknown and just can be identified<br />
experimentally in a correct manner on a finished flapping mechanism, no exact<br />
stability calculations can be done for the different parts <strong>of</strong> the flapping device. Also<br />
those forces highly depend on the wing design. Therefor it is considered to make<br />
the flapping mechanism as robust as possible, trying to copy the kinematic <strong>of</strong> the<br />
hummingbird and neglect weight constraints. Hence, the weight reduction has to<br />
be done later on, when also the wings are completely designed and measurements<br />
are done using the designed test bench, but this is not part <strong>of</strong> this project.<br />
5.1 Overview<br />
The resulting mechanism can be seen in figure 5.1. It has a width <strong>of</strong> about 12cm,<br />
a length <strong>of</strong> 14cm and a height <strong>of</strong> about 8cm. All the parts needed for flapping are<br />
attached to 2mm thick aluminium plate, which is screwed on two shorings. These<br />
shorings have an inclination <strong>of</strong> 10 ◦ which corresponds to the stroke plane angle<br />
with respect to the horizontal <strong>of</strong> the hummingbird’s wing motion. A DC-motor<br />
with a planetary gearhead (reduction ratio 3.71:1) is attached below the plate and<br />
transmits the generated torque to a link, which starts to rotate. The datasheets<br />
for the motor and the gearhead can be seen in the appendix. This rotating link<br />
is connected via a pin to another link, which is guided on the other end in such a<br />
way, that this end point is always centered between the two wing joints. Therefor<br />
two ball bearings are needed to allow the transmission link to rotate freely. Due<br />
to the circular motion <strong>of</strong> the rotating link, the transmission link is moved forward<br />
and backward, which produces the same kinematic pattern as calculated in chapter<br />
3.2.1. This movement is transmitted via another pin to two wing attachements,<br />
which are placed on wing joints, playing the role <strong>of</strong> center <strong>of</strong> rotation for the movement<br />
<strong>of</strong> these attachements.<br />
Due to time constraints, all parts were printed, except the ball bearings, the aluminium<br />
plate and the pins, which were made <strong>of</strong> steel. Therefor the dimensions <strong>of</strong><br />
the links had to be chosen big enough to assure the stability. However the links are<br />
supported in the vertical direction only on one point, the connecting point to the<br />
motor, which has to carry both links. Therefor the connection at the ball bearings<br />
have to be very tight, to ensure that the bending moments, caused by gravity, are<br />
as small as possible.<br />
39
Chapter 5. CAD Design 40<br />
Figure 5.1: Overview <strong>of</strong> resulting mechanism<br />
5.2 Transmission <strong>of</strong> motor torque<br />
To transmit the torque from the motor the following assembly is used (see figure<br />
5.2). The rotating link has a fork like structure, where the motor shaft is in-between,<br />
with the notch aligned at the face <strong>of</strong> the link. A small part, which fits between the<br />
two legs <strong>of</strong> the link, is pushed on the motor shaft and attached to the link using<br />
a screw. The dimensions were chosen such that, by inserting the screw, the small<br />
part is pressed against the motor shaft. However this is not absolute necessary, as<br />
already the notch secures the connection. Nonetheless this force fitting again gives<br />
a more secure force transmission.<br />
Figure 5.2: Connection <strong>of</strong> motor to rotating link
41 5.3. Joints<br />
5.3 Joints<br />
Assuring that the transmission link and the wing attachements can follow the considered<br />
motion, the joints are the most important parts. However this part could<br />
not be solved perfectly. Pushing the center joint forward and backward, the distance<br />
between it and the wing joints changes. As the stroke amplitude is wanted<br />
to be 110 ◦ , the variation <strong>of</strong> the distance is a bigger problem and can not be solved<br />
with this general structure. Therefor either the center joint can be optimized, using<br />
ball bearings to reduce friction, and at the wing joints a loose connection is needed,<br />
or the wing joints are optimized, but then again the center joint will cause more<br />
friction.<br />
For increasing the stability, the second approach is better, as the wings then are<br />
guided more accurately, for which reason the center joint is a more loose connection.<br />
Center joint<br />
Hence the connection <strong>of</strong> the transmission link to the wing attachements is done<br />
according to figure 5.3. The pin is guided through big slots in the wing attachements.<br />
During the forward and backward motion <strong>of</strong> the pin, the attachements are pushed<br />
to follow its way. Due to the movement <strong>of</strong> the pin in the slots friction occurs. To<br />
optimize this design the wing attachement has to be made <strong>of</strong> different materials.<br />
The touching area with the pin could be <strong>of</strong> a material which has low friction, while<br />
the rest should be made <strong>of</strong> a stiff and lightweight material. Nonetheless, this design<br />
is still acceptable as a first approach, as the friction still is pretty small.<br />
To have the center joint stay always centered, it has to be guided. This is done by<br />
a slot in the aluminium plate, where the pin is moved in. To decrease the friction a<br />
ball bearing is glued to the pin. Note that the diameter <strong>of</strong> the ball bearing is just<br />
slightly smaller than the width <strong>of</strong> the slot, to assure that the ball bearing does not<br />
brake itself, when from both sides a touching occurs.<br />
Figure 5.3: Design for guiding the center joint
Chapter 5. CAD Design 42<br />
<strong>Wing</strong> joint<br />
As described above, the wingjoint is optimized. Therefor two ballbearings are used.<br />
One inside the structure <strong>of</strong> the wing joint, the other lying above. On the upper ball<br />
bearing the wing attachement is arranged in such a way that only the inner part <strong>of</strong><br />
the ball bearing is touched. The outer part is then connected only to the motionless<br />
structure <strong>of</strong> the wing joint. To attach the wings, holes with a diameter <strong>of</strong> 2mm and<br />
Figure 5.4: Assembly <strong>of</strong> wing joint<br />
a depth <strong>of</strong> 20mm are made into the wing attachements as can be seen in figure 5.5.<br />
To increase the stability, the structure is thickened around the holes.<br />
Figure 5.5: Structure <strong>of</strong> the wing attachments
Chapter 6<br />
Conclusion<br />
The resulting mechanism, designed according to the kinematic requirements <strong>of</strong> the<br />
desired flapping motion, is acceptable. Due to time constraints no exact measurements<br />
with the manufactured mechanism could be done. Also no information <strong>of</strong> the<br />
generated lift force can be deducted, as this is only possible to measure when the<br />
wing designing is done, which includes the adjustment <strong>of</strong> the wing’s flexibility for<br />
the pitching. And at this time, the mechanism consists <strong>of</strong> a mock-up <strong>of</strong> the wings.<br />
However it can already be seen, that the flapping motion follows the kinematic<br />
pattern as described in chapter 3.2.1, which is a good approximation for the hummingbird’s<br />
flapping. Also first tries showed, that the flapping frequency <strong>of</strong> 15Hz is<br />
reachable, although still many improvements can be done.<br />
The biggest improvements can be done for instance at the center joint. There is still<br />
relatively much friction present, which could be reduced. Also the guidance <strong>of</strong> the<br />
center joint leaves much space for enhancement. Nonetheless the strongly varying<br />
distance between the center joint and the wing joint, can not be eliminated with<br />
the chosen concept, for which reason it can also be considered to choose another<br />
approach for the design, which reduces this weakness. Another reasonable concept,<br />
would be to pitch the wing actively using the same actuator as for the flapping (see<br />
chapter 3.3.1), in the case the passive pitching would fail to deliver enough lift force.<br />
But most <strong>of</strong> these investigations can only be done after the next steps, for instance<br />
the wing design, are finished. With appropriate wings, also exact measurements<br />
can be done and the generated lift force can be discovered. Using a high speed<br />
camera, a more exact comparison <strong>of</strong> the resulting motion and the hummingbird’s<br />
wing motion can be done. Further, if these tasks show good results, implementing<br />
this motion into a real MAV would be the next step to the final objective <strong>of</strong> a flying<br />
flapping wing MAV.<br />
Concluding, as this project is the first step in the direction <strong>of</strong> designing a <strong>Flapping</strong><br />
<strong>Wing</strong> MAV, many useful informations and experience could be gathered, which for<br />
sure support further investigations into this direction.<br />
43
Chapter 6. Conclusion 44
Appendix A<br />
Motor datasheet<br />
45
Appendix A. Motor datasheet 46
Appendix A. Motor datasheet 48
Bibliography<br />
[1] Akira Azuma. The biokinetics <strong>of</strong> flying and swimming. Second Edition, 2002.<br />
[2] Bret W. Tobalske; Douglas R. Warrick; Christopher J. Clark; Donald R.<br />
Powers; Tyson L. Hedrick; Gabriel A. Hyder; Andrew A. Biewener. Threedimensional<br />
kinematics <strong>of</strong> hummingbird flight. The Journal <strong>of</strong> Experimental<br />
Biology 210, 2368-2382, 2007.<br />
[3] J. M. Birch and M. H. Dickinson. Spanwise flow and the attachment <strong>of</strong> the<br />
leading-edge vortex on insect wings. Nature, 412, 729-733, 2001.<br />
[4] Kenneth P. Dial Bret W. Tobalske, Wendy L. Peacock. Kinematics <strong>of</strong> flapbounding<br />
flight in the zebra finch over a wide range <strong>of</strong> speeds. The Journal <strong>of</strong><br />
Experimental Biology 202, 1725–1739, 1999.<br />
[5] Sharon M. Swartz; Jose Iriarte-Diaz; Daniel K. Riskin; Arnold Song; Xiaodong<br />
Tian; David J. Willis; Kenneth S. Breuer. <strong>Wing</strong> structure and the aerodynamics<br />
basis <strong>of</strong> flight in bats. In 45th AIAA Aerospace Sciences Meeting and<br />
Exhibit, AIAA Paper 2007-42, Reno, Nevada, 2007.<br />
[6] Xiaodong Tian; Jose Iriarte-Diaz; Kevin Middleton; Ricardo Galvao; Emily<br />
Israeli; Abigail Roemer; Allyce Sullivan; Arnold Song; Sharon Swartz; Kenneth<br />
Breuer. Direct measurements <strong>of</strong> the kinematics and dynamics <strong>of</strong> bat flight.<br />
Bioinspiration & Biomimetics 1 (2006) S10-S18, 2006.<br />
[7] MICHAEL H. DICKINSON. The effects <strong>of</strong> wing rotation on unsteady aerodynamic<br />
performance at low reynolds numbers. The Journal <strong>of</strong> Experimental<br />
Biology 192, 179–206, 1994.<br />
[8] C. P. ELLINGTON. The novel aerodynamics <strong>of</strong> insect flight: Applications to<br />
micro-air vehicles. The Journal <strong>of</strong> Experimental Biology 202, 3439–3448, 1999.<br />
[9] A. Roland Ennos. The kinematics and aerodynamics <strong>of</strong> the free flight <strong>of</strong> some<br />
diptera. The Journal <strong>of</strong> Experimental Biology 142, 49-85, (1989.<br />
[10] et al. F. T. Muijres. Leading-edge vortex improves lift in slow-flying bats.<br />
Science 319, 1250, 2008.<br />
[11] Stefan Gisler. Unsteady aerodynamics and control issues in flapping flight.<br />
Studies on mechatronics, Autonomous Systems Lab (ASL), Swiss Federal Institute<br />
<strong>of</strong> Technology Zurich (ETH), 2008.<br />
[12] H. Liu and K. Kawachi. A numerical study <strong>of</strong> insect flight. Journal <strong>of</strong> Computational<br />
Physics, 146, 124-156, 1998.<br />
[13] Y. Lu and G. X. Shen. Three-dimensional flow structures and evolution <strong>of</strong> the<br />
leading-edge vortices on a flapping wing. Journal <strong>of</strong> Expermental Biology, 211,<br />
1221-1230, 2008.<br />
49
Bibliography 50<br />
[14] Werner Nachtigall. Vogelflugforschung in deutschland. Journal <strong>of</strong> Ornithology.<br />
125, 157-187, 1984.<br />
[15] Ulla M. Norberg. Allometry <strong>of</strong> bat wings and legs and comparison with bird<br />
wings. Philosophical Transactions <strong>of</strong> the Royal Society <strong>of</strong> London. Series B,<br />
Biological Sciences, Vol. 292, No. 1061 (Jun. 10, 1981), pp. 359-398, 1981.<br />
[16] Fritz-Olaf Lehmann; Simon Pick. The aerodynamic benefit <strong>of</strong> wing–wing interaction<br />
depends on stroke trajectory in flapping insect wings. The Journal<br />
<strong>of</strong> Experimental Biology 210, 1362-1377, 2007.<br />
[17] Douglas R. Warrick; Bret W. Tobalske; Donald R. Powers. Aerodynamics <strong>of</strong><br />
the hovering hummingbird. Nature 435 1094-1097, 2005.<br />
[18] U. M. Norberg; J. M. V. Rayner. Ecological morphology and flight in bats<br />
(mammalia: Chiroptera): <strong>Wing</strong> adaptions, flight performance, foraging strategy<br />
and echolocation. Phil. Trans. R. Soc. Lond. B 316, 335-427, 1987.<br />
[19] Sanjay P. Sane. The aerodynamics <strong>of</strong> insect flight. The Journal <strong>of</strong> Experimental<br />
Biology 206, 4191-4208, 2003.<br />
[20] Rosalyn Sayaman Steven N. Fry and Michael H. Dickinson. Unsteady mechanisms<br />
<strong>of</strong> force generation in aquatic and aerial locomotion. Amer. Zool., 36,<br />
537-554, 1996.<br />
[21] Rosalyn Sayaman Steven N. Fry and Michael H. Dickinson. The aerodynamics<br />
<strong>of</strong> hovering flight in drosophila. The Journal <strong>of</strong> Experimental Biology 208,<br />
2303-2318, 2005.<br />
[22] Weis-Fogh T. Quick estimates <strong>of</strong> flight fitness in hovering animals, including<br />
novel mechanisms for lift production. The Journal <strong>of</strong> Experimental Biology 59,<br />
169-230, 1973.<br />
[23] van den Berg; Coen; Ellington; Charles P. The three-dimensional leading-edge<br />
vortex <strong>of</strong> a hovering model hawkmoth. Philosophical Transactions: Biological<br />
Sciences 352, 329-340, (1997.<br />
[24] R. J. Wood. The frst take<strong>of</strong>f <strong>of</strong> a biologically inspired at-scale robotic insect.<br />
IEEE Transcactions on Robotics, 24:341-347, 2008.