2D image mosaic building 2D3 - Ifremer
2D image mosaic building 2D3 - Ifremer
2D image mosaic building 2D3 - Ifremer

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Project Exocet/D page 14/16<br />
(a) (b)<br />
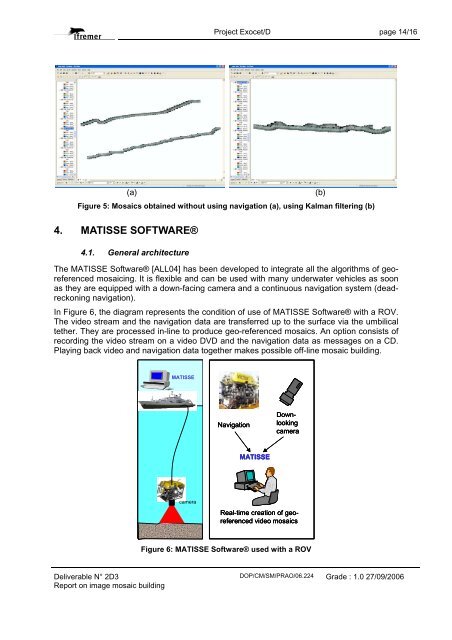
Figure 5: Mosaics obtained without using navigation (a), using Kalman filtering (b)<br />
4. MATISSE SOFTWARE®<br />
4.1. General architecture<br />
The MATISSE Software® [ALL04] has been developed to integrate all the algorithms of georeferenced<br />
<strong>mosaic</strong>ing. It is flexible and can be used with many underwater vehicles as soon<br />
as they are equipped with a down-facing camera and a continuous navigation system (deadreckoning<br />
navigation).<br />
In Figure 6, the diagram represents the condition of use of MATISSE Software® with a ROV.<br />
The video stream and the navigation data are transferred up to the surface via the umbilical<br />
tether. They are processed in-line to produce geo-referenced <strong>mosaic</strong>s. An option consists of<br />
recording the video stream on a video DVD and the navigation data as messages on a CD.<br />
Playing back video and navigation data together makes possible off-line <strong>mosaic</strong> <strong>building</strong>.<br />
Deliverable N° <strong>2D</strong>3<br />
Report on <strong>image</strong> <strong>mosaic</strong> <strong>building</strong><br />
MATISSE<br />
camera<br />
Navigation<br />
MATISSE<br />
Downlooking<br />
camera<br />
Real-time creation of georeferenced<br />
video <strong>mosaic</strong>s<br />
Figure 6: MATISSE Software® used with a ROV<br />
DOP/CM/SM/PRAO/06.224<br />
Grade : 1.0 27/09/2006