

Design of an ergonomic control lever for wheel loader attachments
Design of an ergonomic control lever for wheel loader attachments
Design of an ergonomic control lever for wheel loader attachments

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.1.1 Anatomy <strong>of</strong> the h<strong>an</strong>d<br />
The h<strong>an</strong>d consists <strong>of</strong> m<strong>an</strong>y parts that work together to per<strong>for</strong>m the functions needed <strong>for</strong><br />
daily activities, the most visible part being the skin.<br />
The fingers have the second most amounts <strong>of</strong> touch- <strong>an</strong>d thermo receptors in the hum<strong>an</strong><br />
body. They are very sensitive to touch, temperature, vibration <strong>an</strong>d more. The fingers<br />
themselves do not contain m<strong>an</strong>y muscles but are <strong>control</strong>led by long tendons that come<br />
from muscles in the h<strong>an</strong>d <strong>an</strong>d <strong>for</strong>earm (SCOI, 2010). These muscles are divided into<br />
intrinsic <strong>an</strong>d extrinsic muscles, (figure 3.1). The intrinsic are inside the h<strong>an</strong>d while extrinsic<br />
are placed in the <strong>for</strong>earm <strong>an</strong>d connect to the h<strong>an</strong>d by long tendons. One intrinsic muscle<br />
group is the hyposthenia seen in the image. The muscles in the arm do the large<br />
movements <strong>of</strong> the h<strong>an</strong>d while intrinsic muscles <strong>control</strong> side-to-side movements <strong>of</strong> the<br />
fingers <strong>an</strong>d thumb. This also have the consequence that pain in the <strong>for</strong>earm muscles are<br />
related to ergonmics <strong>of</strong> the h<strong>an</strong>ds.<br />
3.1.2 H<strong>an</strong>d function<br />
According to Haslegrave & Pheas<strong>an</strong>t (2006) the h<strong>an</strong>d is complex <strong>an</strong>d designing h<strong>an</strong>d<br />
tools may require m<strong>an</strong>y different measurements to be considered when designing tools,<br />
<strong>control</strong>s or parts <strong>for</strong> assembly. Theory research <strong>of</strong> different grips <strong>an</strong>d the movements the<br />
h<strong>an</strong>ds are able to per<strong>for</strong>m, give a basis <strong>for</strong> the work ahead.<br />
Grips<br />
Attempts at defining the large number <strong>of</strong> actions capable by the h<strong>an</strong>d have not resulted<br />
in a finite number <strong>of</strong> grips. There are however a few basic definitions: gripping <strong>an</strong>d nongripping<br />
actions such as poking, pressing, stroking etc. Gripping actions create a “closed<br />
kinetic chain” that hold objects in place. The non-gripping actions fall instead in the<br />
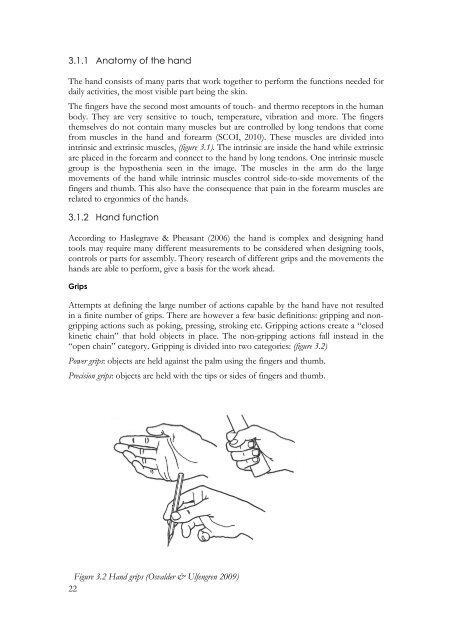
“open chain” category. Gripping is divided into two categories: (figure 3.2)<br />
Power grips: objects are held against the palm using the fingers <strong>an</strong>d thumb.<br />
Precision grips: objects are held with the tips or sides <strong>of</strong> fingers <strong>an</strong>d thumb.<br />
Figure 3.2 H<strong>an</strong>d grips (Osvalder & Ulfengren 2009)<br />
22














