Classical Planning
Classical Planning
Classical Planning

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
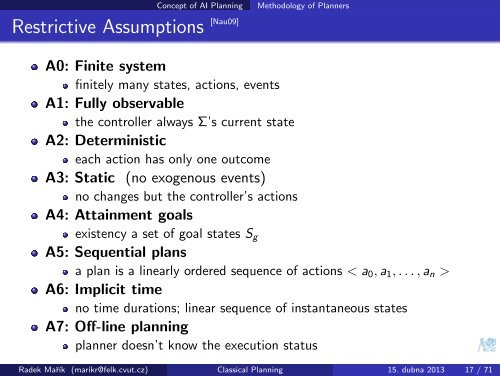
Restrictive Assumptions [Nau09]<br />
Concept of AI <strong>Planning</strong> Methodology of Planners<br />
A0: Finite system<br />
finitely many states, actions, events<br />
A1: Fully observable<br />
the controller always Σ’s current state<br />
A2: Deterministic<br />
each action has only one outcome<br />
A3: Static (no exogenous events)<br />
no changes but the controller’s actions<br />
A4: Attainment goals<br />
existency a set of goal states Sg<br />
A5: Sequential plans<br />
a plan is a linearly ordered sequence of actions < a0, a1, . . . , an ><br />
A6: Implicit time<br />
no time durations; linear sequence of instantaneous states<br />
A7: Off-line planning<br />
planner doesn’t know the execution status<br />
Radek Maˇrík (marikr@felk.cvut.cz) <strong>Classical</strong> <strong>Planning</strong> 15. dubna 2013 17 / 71






![RANSAC [Fischler, Bolles '81]](https://img.yumpu.com/17549294/1/190x143/ransac-fischler-bolles-81.jpg?quality=85)