Co-ordinates
Co-ordinates
Co-ordinates

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
NAVIGATION<br />
The implementation of a simulation<br />
platform for INS/GNSS integrated systems<br />
Readers may recall that in last issue we published the components of INS/GNSS simulation platform and<br />
principle of the simulator. Here we present the results and discussion<br />
Chih-Yu Hu<br />
Department of<br />
Geomatics, National<br />
Cheng Kung<br />
University, Taiwan<br />
Meng-Lung Tsai<br />
Department of<br />
Geomatics, National<br />
Cheng Kung<br />
University, Taiwan<br />
Kai-Wei Chiang<br />
Department of<br />
Geomatics, National<br />
Cheng Kung<br />
University, Taiwan<br />
16 | <strong>Co</strong><strong>ordinates</strong> November 2010<br />
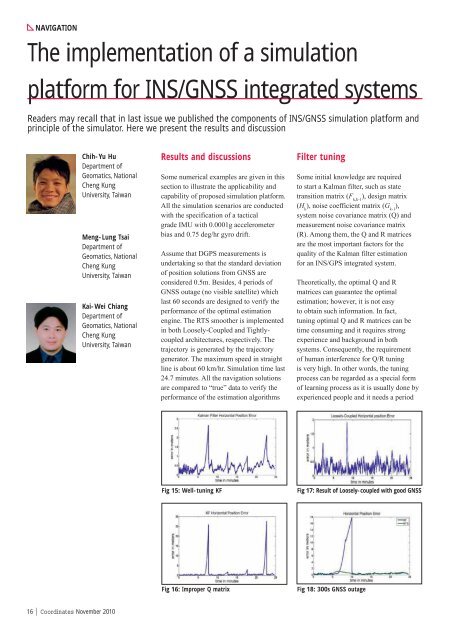
Results and discussions<br />
Some numerical examples are given in this<br />
section to illustrate the applicability and<br />
capability of proposed simulation platform.<br />
All the simulation scenarios are conducted<br />
with the specification of a tactical<br />
grade IMU with 0.0001g accelerometer<br />
bias and 0.75 deg/hr gyro drift.<br />
Assume that DGPS measurements is<br />
undertaking so that the standard deviation<br />
of position solutions from GNSS are<br />
considered 0.5m. Besides, 4 periods of<br />
GNSS outage (no visible satellite) which<br />
last 60 seconds are designed to verify the<br />
performance of the optimal estimation<br />
engine. The RTS smoother is implemented<br />
in both Loosely-<strong>Co</strong>upled and Tightlycoupled<br />
architectures, respectively. The<br />
trajectory is generated by the trajectory<br />
generator. The maximum speed in straight<br />
line is about 60 km/hr. Simulation time last<br />
24.7 minutes. All the navigation solutions<br />
are compared to “true” data to verify the<br />
performance of the estimation algorithms<br />
Filter tuning<br />
Some initial knowledge are required<br />
to start a Kalman filter, such as state<br />
transition matrix (F k,k-1 ), design matrix<br />
(H k ), noise coefficient matrix (G k-1 ),<br />
system noise covariance matrix (Q) and<br />
measurement noise covariance matrix<br />
(R). Among them, the Q and R matrices<br />
are the most important factors for the<br />
quality of the Kalman filter estimation<br />
for an INS/GPS integrated system.<br />
Theoretically, the optimal Q and R<br />
matrices can guarantee the optimal<br />
estimation; however, it is not easy<br />
to obtain such information. In fact,<br />
tuning optimal Q and R matrices can be<br />
time consuming and it requires strong<br />
experience and background in both<br />
systems. <strong>Co</strong>nsequently, the requirement<br />
of human interference for Q/R tuning<br />
is very high. In other words, the tuning<br />
process can be regarded as a special form<br />
of learning process as it is usually done by<br />
experienced people and it needs a period<br />
Fig 15: Well-tuning KF Fig 17: Result of Loosely-coupled with good GNSS<br />
Fig 16: Improper Q matrix Fig 18: 300s GNSS outage