5축 가공기
5축 가공기
5축 가공기

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
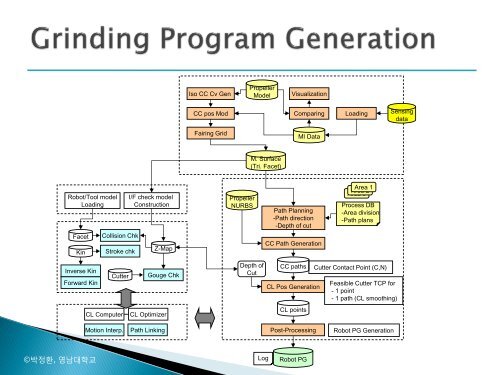
Robot/Tool model<br />
Loading<br />
Facet<br />
Kin<br />
Inverse Kin<br />
Forward Kin<br />
© 박정환, 영남대학교<br />
Collision Chk<br />
Stroke chk<br />
Cutter<br />
Motion Interp.<br />
I/F check model<br />
Construction<br />
Z-Map<br />
Gouge Chk<br />
CL Computer CL Optimizer<br />
Path Linking<br />
Iso CC Cv Gen<br />
CC pos Mod<br />
Fairing Grid<br />
Propeller<br />
NURBS<br />
Propeller<br />
Model<br />
M. Surface<br />
(Tri. Facet)<br />
Depth of<br />
Cut<br />
Log<br />
Visualization<br />
Path Planning<br />
-Path direction<br />
-Depth of cut<br />
CC Path Generation<br />
CC paths<br />
CL Pos Generation<br />
CL points<br />
Post-Processing<br />
Robot PG<br />
Comparing<br />
MI Data<br />
Loading<br />
Area 1<br />
Area 2<br />
Area 3<br />
Process DB<br />
-Area division<br />
-Path plans<br />
Cutter Contact Point (C,N)<br />
Feasible Cutter TCP for<br />
- 1 point<br />
- 1 path (CL smoothing)<br />
Robot PG Generation<br />
Sensing<br />
data